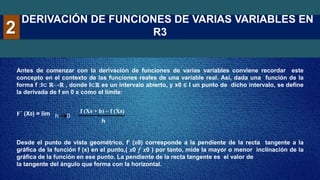
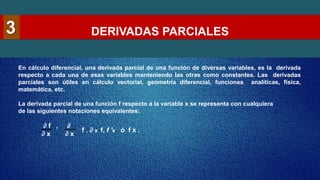
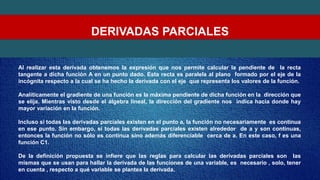
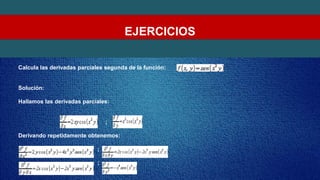
El documento aborda la derivación e integración de funciones de varias variables, cubriendo temas como límites, continuidad, derivadas parciales, diferenciación total, gradiente, divergencia y rotor. Se incluyen definiciones, teoremas y ejemplos prácticos para facilitar el aprendizaje de estos conceptos matemáticos. También se discute la importancia de estos cálculos en diversas aplicaciones, enfatizando su relevancia en el estudio de problemas matemáticos.