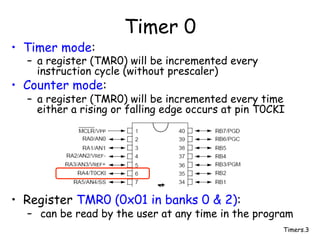
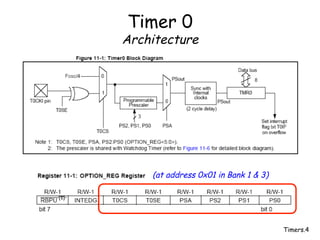
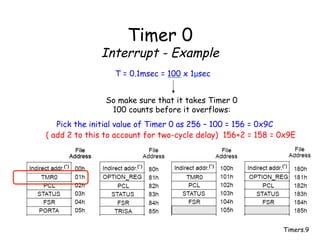
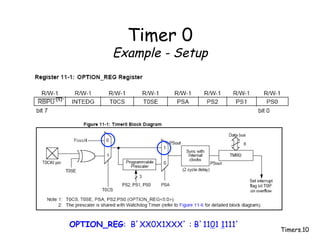
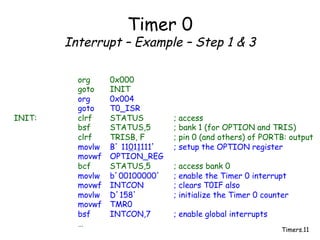
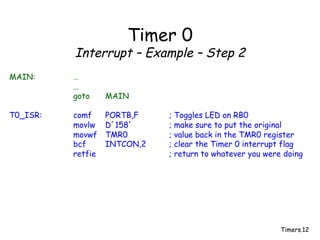
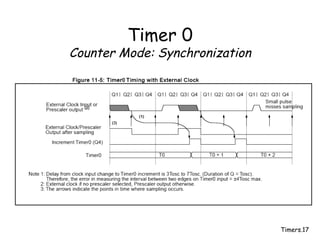
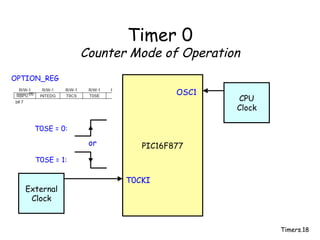
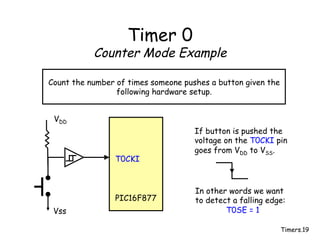
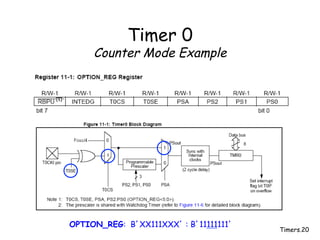
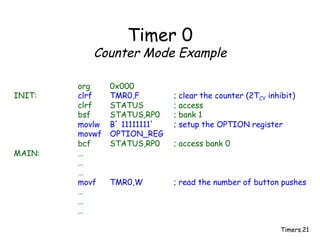
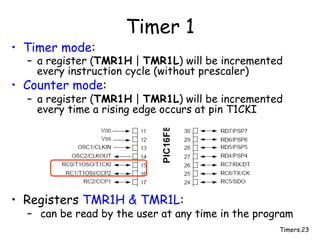
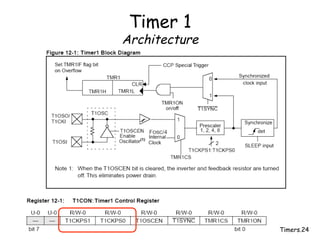
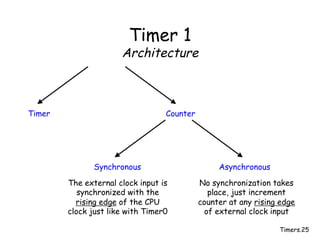
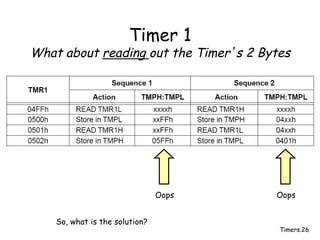
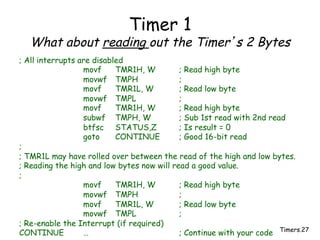
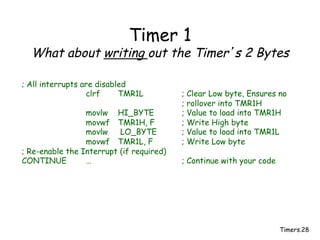
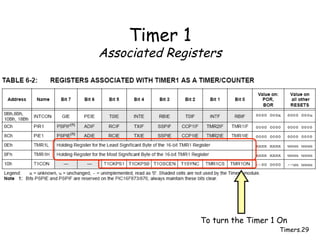
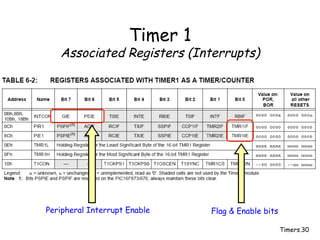
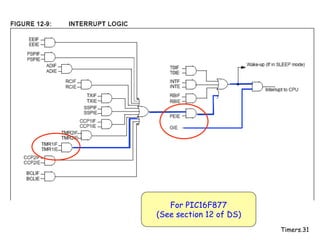
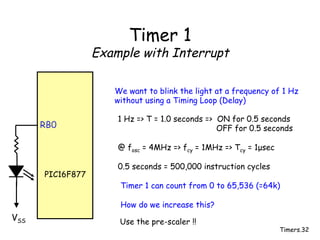
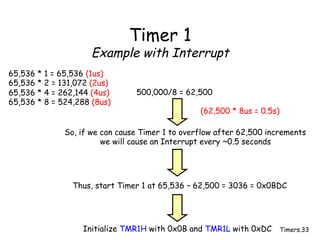
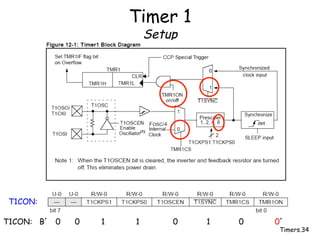
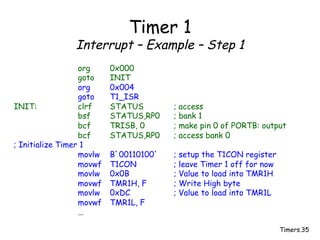
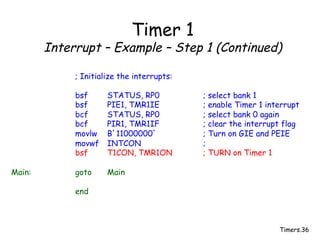
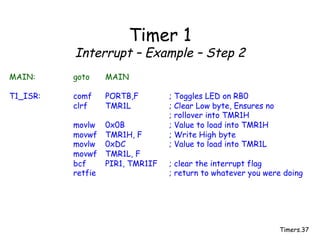
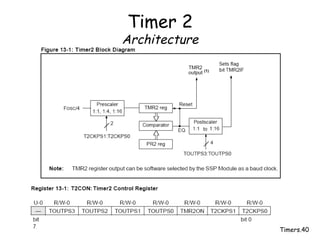
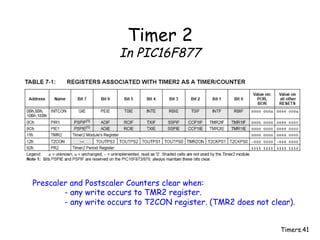
The document discusses timers and counters in PIC microcontrollers. It describes Timer 0, Timer 1, and Timer 2. Timer 0 is an 8-bit timer, Timer 1 is a 16-bit timer, and Timer 2 is also 8-bit. All have associated registers for configuration and counting. Timer 0 and Timer 1 can be used in timer or counter modes, while Timer 2 increments until it matches a preset value. The document provides examples of initializing and using the timers with interrupts to generate precise time delays.