The document presents an extensive overview of various flow velocity measurement techniques, with a focus on three-dimensional particle image velocimetry (3D PIV) and wall PIV. It discusses the principles, historical development, techniques, limitations, experimental setup, and measurement uncertainties of PIV methods. Conclusions highlight the capabilities and accuracy of these techniques in measuring flow fields near walls with specific uncertainties addressed.

![Flow Velocity Measurement Techniques
Source: MIT Open Courseware [2]](https://image.slidesharecdn.com/threedimensionalparticleimagevelocimetry-170324094759/85/Three-dimensional-particle-image-velocimetry-3-320.jpg)
![Intrusive Techniques
A Pitot Static Tube
Source: NPTEL Mechanical [3]
Hot wire thermal Anemometer
A,B and n are calibration constants](https://image.slidesharecdn.com/threedimensionalparticleimagevelocimetry-170324094759/85/Three-dimensional-particle-image-velocimetry-4-320.jpg)

![Laser Doppler Velocimetry
Doppler shift (fD) =V*(cosine(φs)-cosine(φi))/λ
Source: NPTEL Mechanical [3]](https://image.slidesharecdn.com/threedimensionalparticleimagevelocimetry-170324094759/85/Three-dimensional-particle-image-velocimetry-6-320.jpg)
![Particle Image Velocimetry Technique
Particle displacement method: to measure the
displacements of the tracer particles seeded in the flow in
a fixed time interval
Source: MIT Open Courseware [2]](https://image.slidesharecdn.com/threedimensionalparticleimagevelocimetry-170324094759/85/Three-dimensional-particle-image-velocimetry-8-320.jpg)
![Historical Development
Quantitative velocity data from particle streak photographs (1930)
PIV was born as Laser SpeckleVelocimetry
Source: Particle Image Velocimetry
By Ronald J. Adrian, Jerry Westerweel [4]
Particle Streak](https://image.slidesharecdn.com/threedimensionalparticleimagevelocimetry-170324094759/85/Three-dimensional-particle-image-velocimetry-10-320.jpg)
![Historical Development
Laser Speckle Velocimetry; Young’s fringes analysis
(Dudderar & Simpkins 1977)
The specific characteristic of scattered laser light that
causes the phenomenon called “speckle” was used to
allow the measurement of the displacements of the
surface of samples subjected to strains.
Source: Wikipedia[10]](https://image.slidesharecdn.com/threedimensionalparticleimagevelocimetry-170324094759/85/Three-dimensional-particle-image-velocimetry-11-320.jpg)
![Basic Principle of PIV
The actual measurement is consequently performed in
two successive steps:
(a)Recording of images
(b)Processing of the images to determine the tracer
displacement.
Source: MIT Open Courseware [2]](https://image.slidesharecdn.com/threedimensionalparticleimagevelocimetry-170324094759/85/Three-dimensional-particle-image-velocimetry-13-320.jpg)
![Basic Principle of PIV
Source: MIT Open Courseware [2]](https://image.slidesharecdn.com/threedimensionalparticleimagevelocimetry-170324094759/85/Three-dimensional-particle-image-velocimetry-14-320.jpg)
![PIV Results
Source: MIT Open Courseware [2]](https://image.slidesharecdn.com/threedimensionalparticleimagevelocimetry-170324094759/85/Three-dimensional-particle-image-velocimetry-15-320.jpg)
![PIV Results
Source: MIT Open Courseware [2]](https://image.slidesharecdn.com/threedimensionalparticleimagevelocimetry-170324094759/85/Three-dimensional-particle-image-velocimetry-16-320.jpg)
![PIV Results
Source: MIT Open Courseware [2]](https://image.slidesharecdn.com/threedimensionalparticleimagevelocimetry-170324094759/85/Three-dimensional-particle-image-velocimetry-17-320.jpg)

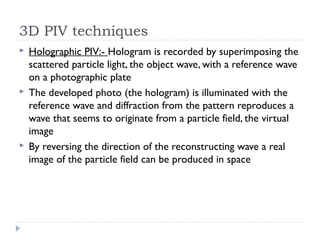
![3D PIV techniques
Scanning PIV:- One or more cameras observe the
measurement volume as a laser sheet is scanned across it.
Source: Lawson M. John, Dawson R. James (2014) [5]](https://image.slidesharecdn.com/threedimensionalparticleimagevelocimetry-170324094759/85/Three-dimensional-particle-image-velocimetry-19-320.jpg)
![3D PIV techniques
Defocusing PIV:- A point in space off-axis from an
aperture will have an image that experiences a lateral
offset as the point moves along the axis of the optical
system.
Source: Francisco Pereira and Morteza Gharib [6]](https://image.slidesharecdn.com/threedimensionalparticleimagevelocimetry-170324094759/85/Three-dimensional-particle-image-velocimetry-20-320.jpg)
![3D PIV techniques
Source: Hinsch K.D. (2002) [7]](https://image.slidesharecdn.com/threedimensionalparticleimagevelocimetry-170324094759/85/Three-dimensional-particle-image-velocimetry-22-320.jpg)
![3D PIV techniques
Tomographic PIV:- Tracer particles within the measurement
volume are illuminated by a pulsed light source and the
scattered light pattern is recorded simultaneously from several
viewing directions using CCD cameras.
Source: G.E. Elsinga, F. Scarano, B. Wieneke, B.W. etal (2005) [8]](https://image.slidesharecdn.com/threedimensionalparticleimagevelocimetry-170324094759/85/Three-dimensional-particle-image-velocimetry-23-320.jpg)
![3D PIV techniques
3D-PTV:- The particles located in a seeded volume are
imaged by three or four synchronized CCD cameras
arranged convergently.
The cameras and the illumination must be mounted on a
platform moving approximately with the mean velocity of
the flow
Source: Marko Virant and Themistocles Dracos (1997) [9]](https://image.slidesharecdn.com/threedimensionalparticleimagevelocimetry-170324094759/85/Three-dimensional-particle-image-velocimetry-24-320.jpg)


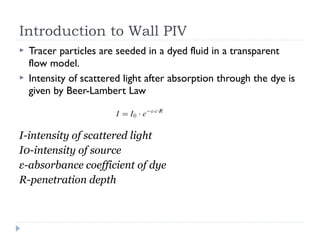
![Introduction to Wall PIV
Particles near the wall appear brighter than particles farther
away from the wall.This, together with the x- and y-position of
the particle in the image, allows the particle’s three-
dimensional position to be obtained
Source: Berthe Andre´, Kondermann Daniel
etal (2009)[1]](https://image.slidesharecdn.com/threedimensionalparticleimagevelocimetry-170324094759/85/Three-dimensional-particle-image-velocimetry-28-320.jpg)
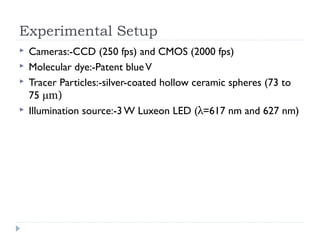
![Experimental Setup
Source: Berthe Andre´, Kondermann Daniel
etal (2009)[1]](https://image.slidesharecdn.com/threedimensionalparticleimagevelocimetry-170324094759/85/Three-dimensional-particle-image-velocimetry-30-320.jpg)
![Experimental Setup
Transmission of patent blue V and relative spectra of the used
LEDs. Crosses represent the red wavelength, circles the orange
wavelength
Source: Berthe Andre´,
Kondermann Daniel etal (2009)
[1]](https://image.slidesharecdn.com/threedimensionalparticleimagevelocimetry-170324094759/85/Three-dimensional-particle-image-velocimetry-31-320.jpg)



![References
[1] Berthe Andre´, Kondermann Daniel, Christensen Carolyn, Goubergrits Leonid Garbe
Christoph,Affeld Klaus, Kertzscher Ulrich(2009) Three-dimensional, three-component
wall-PIV. Journal of Exp. Fluids DOI 10.1007/s00348-009-0777-4
[2] MIT Open Courseware,
http://ocw.metu.edu.tr/pluginfile.php/1873/mod_resource/content/0/AE547/AE547_11_P
IV
[3] NPTEL Mechanical
http://nptel.ac.in/courses/101103004/pdf/mod7
[4] Particle ImageVelocimetry By Ronald J.Adrian, JerryWesterweel, Cambridge University
Press
[5] Lawson M. John, Dawson R. James (2014) Scanning PIV using one or two cameras for
fine scale turbulence measurements. In: 17th International Symposium on Applications of
LaserTechniques to Fluid Mechanics Lisbon, Portugal, 07-10 July, 2014
[6] Pereira Francisco, Gharib Morteza (2002) Defocusing digital particle image
Velocimetry and the three-dimensional characterization of two-phase flows. Journal
of Measurement Science andTechnology 13 683–694](https://image.slidesharecdn.com/threedimensionalparticleimagevelocimetry-170324094759/85/Three-dimensional-particle-image-velocimetry-36-320.jpg)
![References
[7] Hinsch K.D. (2002) Holographic particle image velocimetry. Journal of Measurement
Science andTechnology 13 R61-R72
[8] Elsinga G.E., Scarano F.,Wieneke B., OudheusdenVan B.W. (2005) Tomographic
particle image velocimetry. In: 6th International Symposium on Particle Image
Velocimetry Pasadena, California, USA, September 21-23, 2005
[9]Virant Marko, DracosThemistocles (1997) 3D PTV and its application on
Lagrangian motion. Journal of Measurement Science andTechnology 8 1539-1552
[10] wikipedia
https://en.wikipedia.org/wiki/Speckle_pattern](https://image.slidesharecdn.com/threedimensionalparticleimagevelocimetry-170324094759/85/Three-dimensional-particle-image-velocimetry-37-320.jpg)