Downloaded 55 times















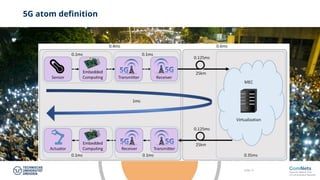
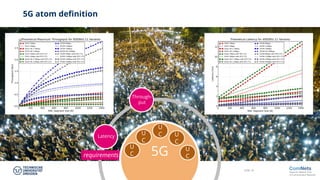






















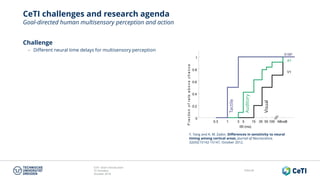
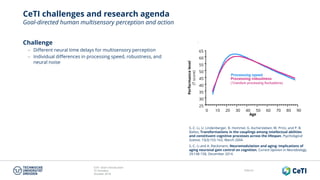
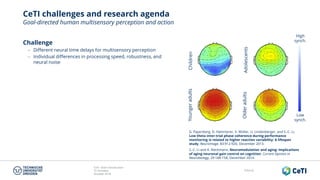

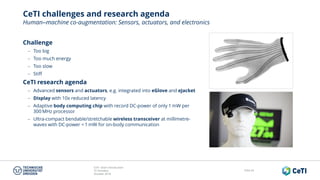





The document discusses the concept of the Tactile Internet with Human-in-the-Loop. It aims to democratize access to skills and expertise for people of all backgrounds and abilities. This goes beyond the current Internet's goal of providing access to information regardless of location or time. The document outlines a vision for two-way skills transfer between humans and machines using multimodal feedback over 5G networks. It discusses challenges like differing neural time delays for multisensory perception and individual differences in processing that affect perception and action. The Center for Tactile Internet's research agenda involves understanding multisensory goal-directed processing neurocognitively, modeling perception and action, and expertise in related fields to advance human-technology interactions