Downloaded 174 times
![THE BASIC GENETIC ALGORITHM
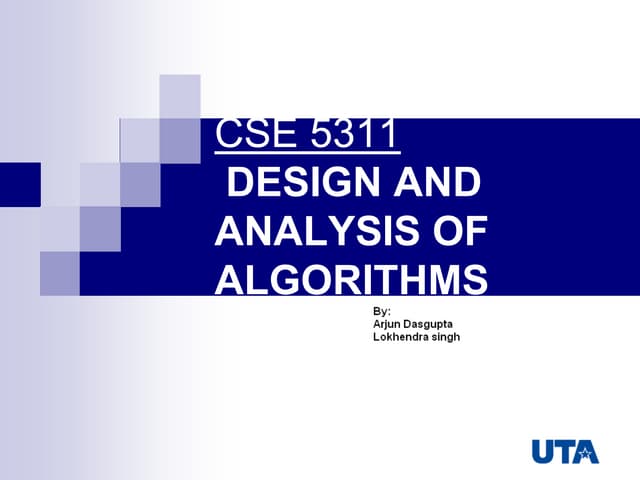
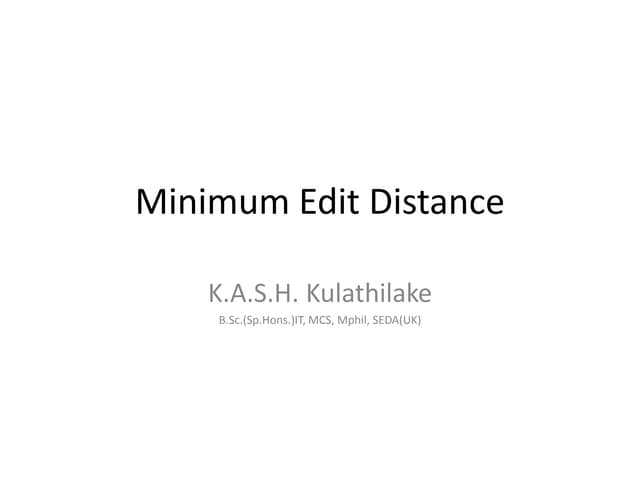
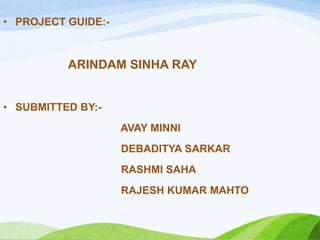
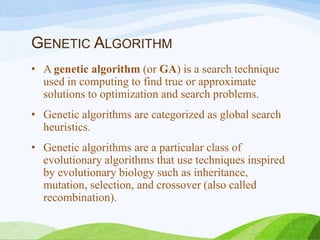
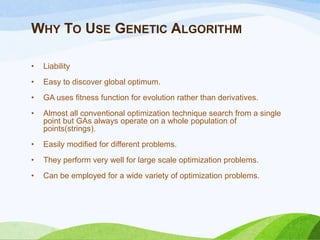
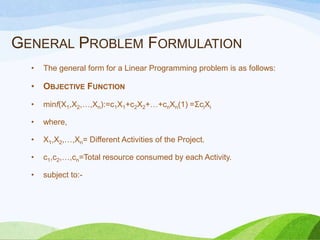
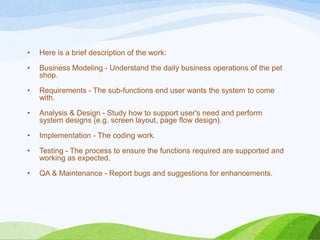
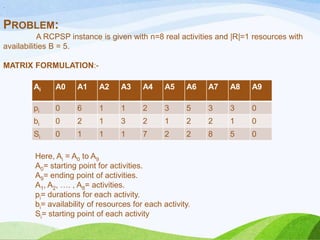
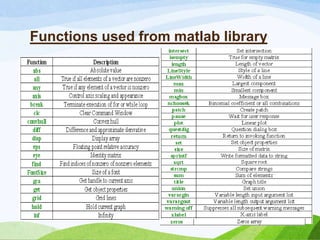
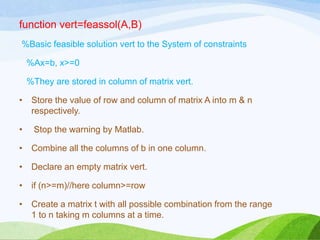
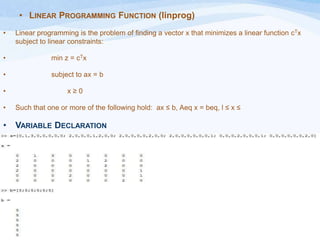
The basic genetic algorithm is as follows:
• [start] Genetic random population of n chromosomes (suitable solutions for the problem)
• [Fitness] Evaluate the fitness f(x) of each chromosome x in the population
• [New population] Create a new population by repeating following steps until the New population is complete
- [selection] select two parent chromosomes from a population according to their fitness ( the better fitness, the
bigger chance to get selected).
- [crossover] With a crossover probability, cross over the parents to form new offspring ( children). If no crossover
was performed, offspring is the exact copy of parents.
- [Mutation] With a mutation probability, mutate new offspring at each locus (position in chromosome)
- [Accepting] Place new offspring in the new population.
• [Replace] Use new generated population for a further sum of the algorithm.
• [Test] If the end condition is satisfied, stop, and return the best solution in current population.
• [Loop] Go to step2 for fitness evaluation.](https://image.slidesharecdn.com/gafinalppt-130517173317-phpapp01/85/STUDY-ON-PROJECT-MANAGEMENT-THROUGH-GENETIC-ALGORITHM-10-320.jpg)
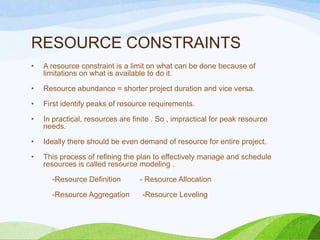
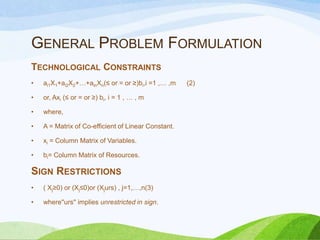
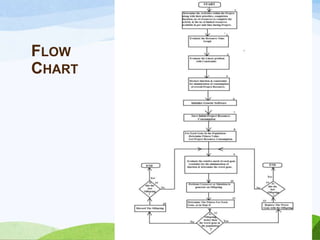
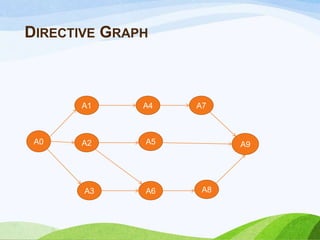
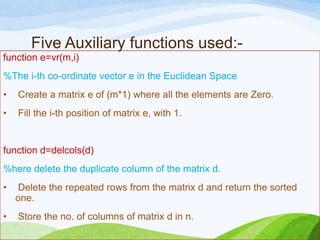
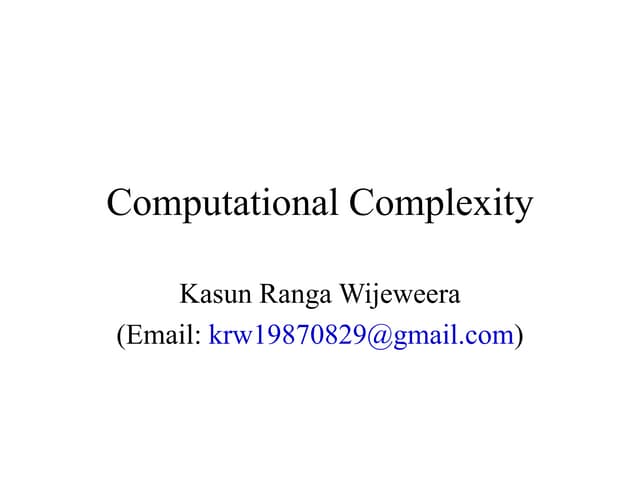
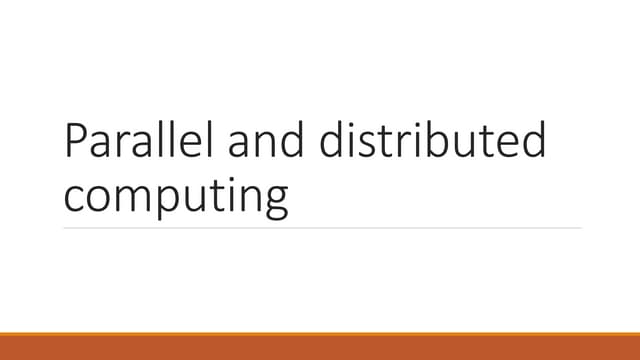
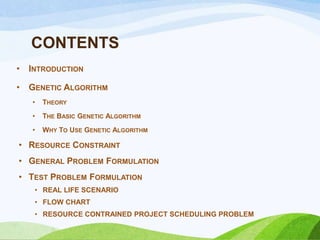
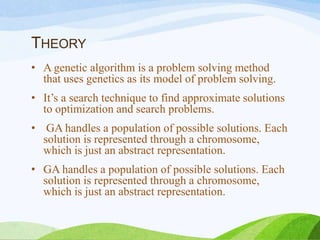
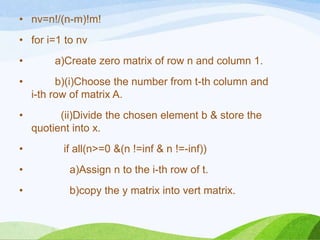
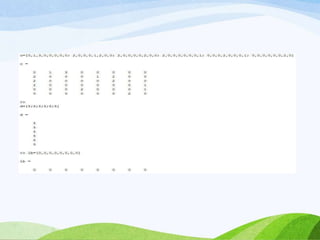
![function [row,mi]=MRT(a,b)
%The Minimum Ratio Test(MRT) performed on vector a & b.
%Output Parameters are:-
%row=index of the pivot row.
%mi=value of the smallest ratio.
• Store the length of the vector a into m.
• Create a Matrix C with elements 1 to m.
• Combine all the column into one column of Matrix a.
• Combine all the column into one column of Matrix b.
• If b>0,then assign the value of c into l.
• Array right division of lth column of a & b.
• Now, find the minimum from the Quotient matrix.
• Store the min. value in mi & the index no. in row matrix.
• Store the value of row-th index of l matrix into row.](https://image.slidesharecdn.com/gafinalppt-130517173317-phpapp01/85/STUDY-ON-PROJECT-MANAGEMENT-THROUGH-GENETIC-ALGORITHM-34-320.jpg)
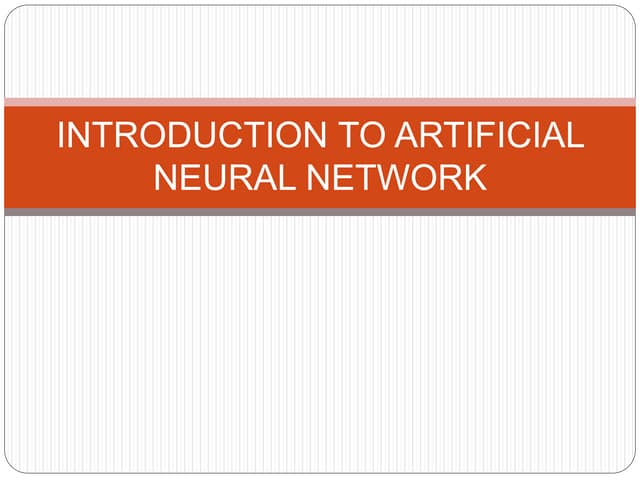
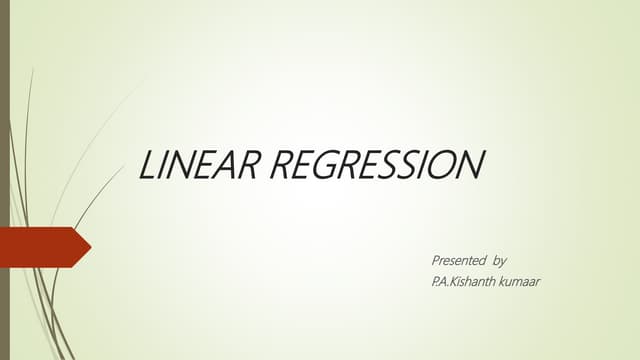
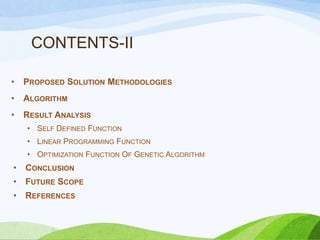
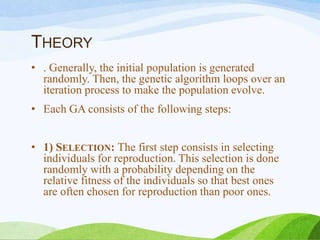
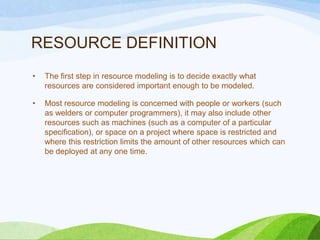
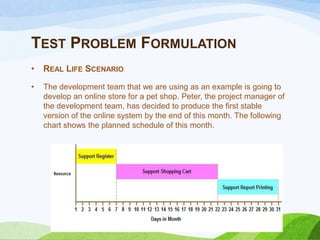
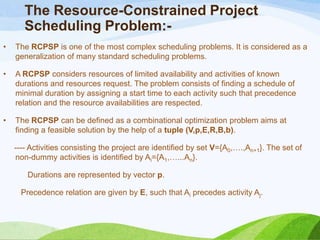
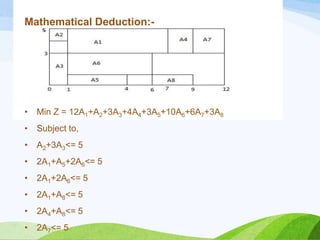
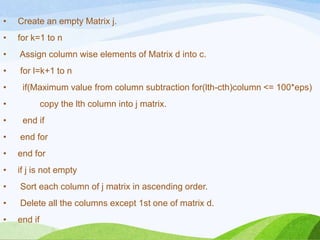
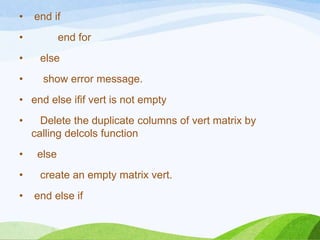
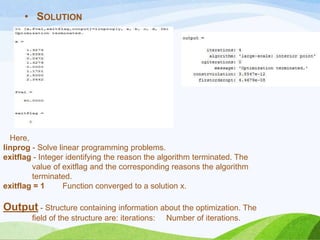
![function[m,j]=Br(d)
%Implementation of the Bland's rule applied to the array d.
%This function is called from the following functions:-
%Simplex2p,dsimplex,addconstr,simplex and cpa.
%Output parameters:-
%m=first negative no. in the array D.
%j=index of entry m.
• Find any less than zero elements in d and shows their index in vector matrix.
• if ind is not empty
• Store the index no. of first negative no. in j.
• Store the first negative no. of matrix d in m.
• else
• create an empty matrix m.
• create an empty matrix j.
• end else-if](https://image.slidesharecdn.com/gafinalppt-130517173317-phpapp01/85/STUDY-ON-PROJECT-MANAGEMENT-THROUGH-GENETIC-ALGORITHM-36-320.jpg)
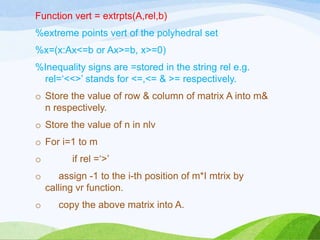
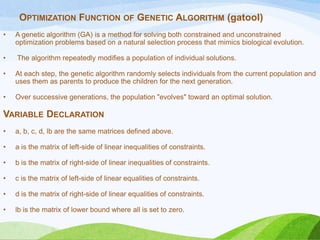
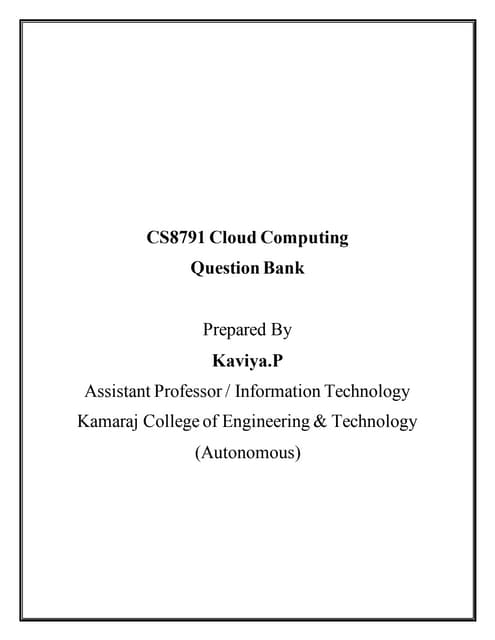
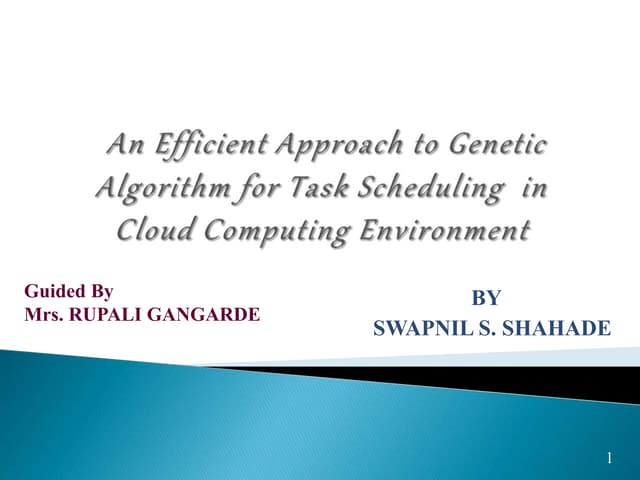
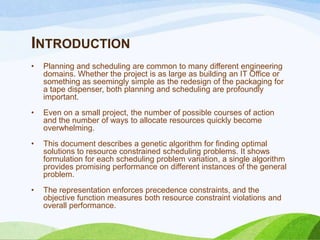
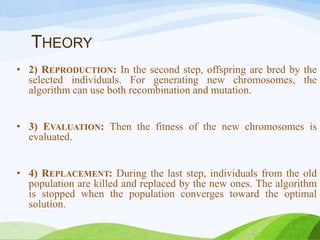
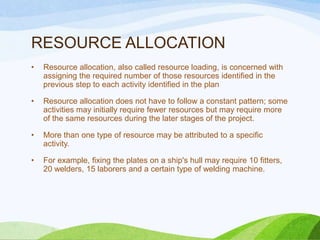
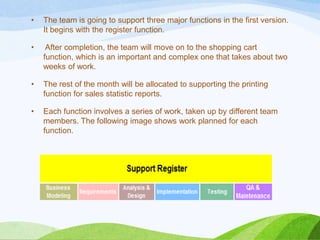
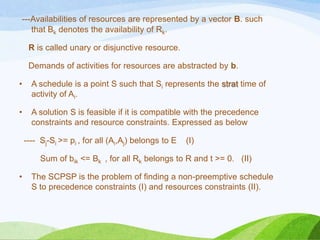
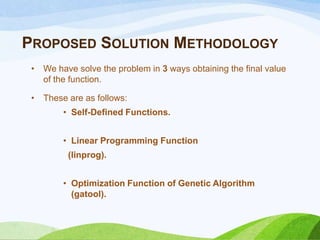
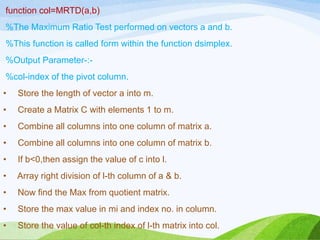
![• USING GENETIC ALGORITHM TOOL BOX
To use the genetic algorithm at the command line, call the genetic algorithm function ga
with the syntax[x fval] = ga(@fitnessfun, nvars, options)
where
@fitnessfun is a handle to the fitness function.
nvars is the number of independent variables for the fitness function.
options is a structure containing options for the genetic algorithm. If you do not pass in this
argument, ga uses its default options.
The results are given by
x — Point at which the final value is attained.
fval — Final value of the fitness function.
Using the function ga is convenient if you want to
Return results directly to the MATLAB workspace.
Run the genetic algorithm multiple times with different options, by calling ga from a file.](https://image.slidesharecdn.com/gafinalppt-130517173317-phpapp01/85/STUDY-ON-PROJECT-MANAGEMENT-THROUGH-GENETIC-ALGORITHM-54-320.jpg)



This document describes using a genetic algorithm to solve resource constrained project scheduling problems. It begins with an introduction explaining that planning and scheduling projects involves managing many possible solutions and resource allocations. It then provides sections on genetic algorithms, the basic genetic algorithm process, and why genetic algorithms are suitable for this type of optimization problem. The document outlines the general formulation of resource constrained project scheduling as a linear programming problem and provides an example problem scenario. It includes flowcharts and discusses implementing the proposed genetic algorithm solution methodology.