1) The document introduces single-degree-of-freedom (SDOF) structural dynamics systems. SDOF systems have a single mass that translates or rotates in one direction.
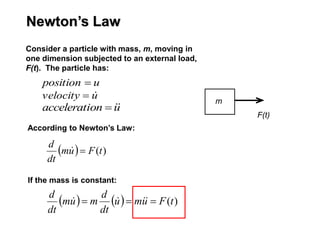
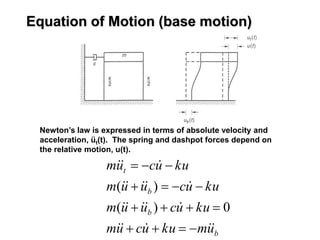
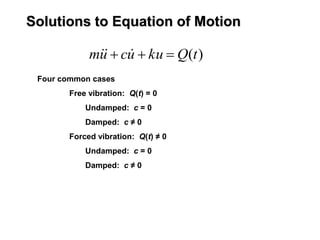
2) Basic concepts are discussed including degrees of freedom, Newton's second law, and the equation of motion for an SDOF system with an external force or base excitation.
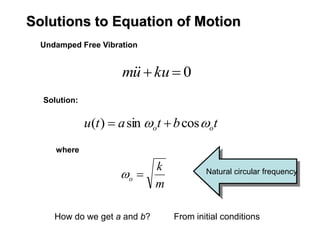
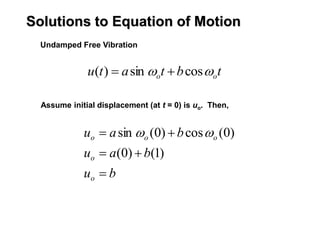
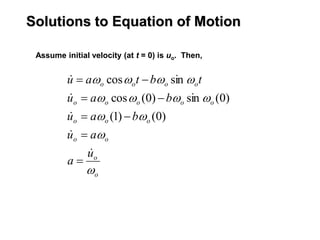
3) Solutions to the equation of motion are explored for undamped free vibration and undamped forced vibration cases. The solution for undamped free vibration takes the form of simple harmonic motion.













![Geotechnical Engineering-II [Lec #8: Boussinesq Method - Rectangular Areas]](https://cdn.slidesharecdn.com/ss_thumbnails/8-181020124822-thumbnail.jpg?width=640&height=640&fit=bounds)







![Geotechnical Engineering-I [Lec #3: Phase Relationships]](https://cdn.slidesharecdn.com/ss_thumbnails/3-180923175732-thumbnail.jpg?width=640&height=640&fit=bounds)


![Geotechnical Engineering-I [Lec #10: USCS]](https://cdn.slidesharecdn.com/ss_thumbnails/10-180923183613-thumbnail.jpg?width=640&height=640&fit=bounds)
![Geotechnical Engineering-I [Lec #5: Phase Relationships - Problems-2]](https://cdn.slidesharecdn.com/ss_thumbnails/5-180923180153-thumbnail.jpg?width=640&height=640&fit=bounds)

![Losses in prestress [autosaved]](https://cdn.slidesharecdn.com/ss_thumbnails/lossesinprestressautosaved-201029082216-thumbnail.jpg?width=640&height=640&fit=bounds)

![Geotechnical Engineering-II [Lec #11: Settlement Computation]](https://cdn.slidesharecdn.com/ss_thumbnails/11-181020124840-thumbnail.jpg?width=640&height=640&fit=bounds)




































![[Deck] What's New in Spark-Iceberg Integration via DSV2.pptx](https://cdn.slidesharecdn.com/ss_thumbnails/deckwhatsnewinspark-icebergintegrationviadsv2-260210005337-25955b12-thumbnail.jpg?width=640&height=640&fit=bounds)





