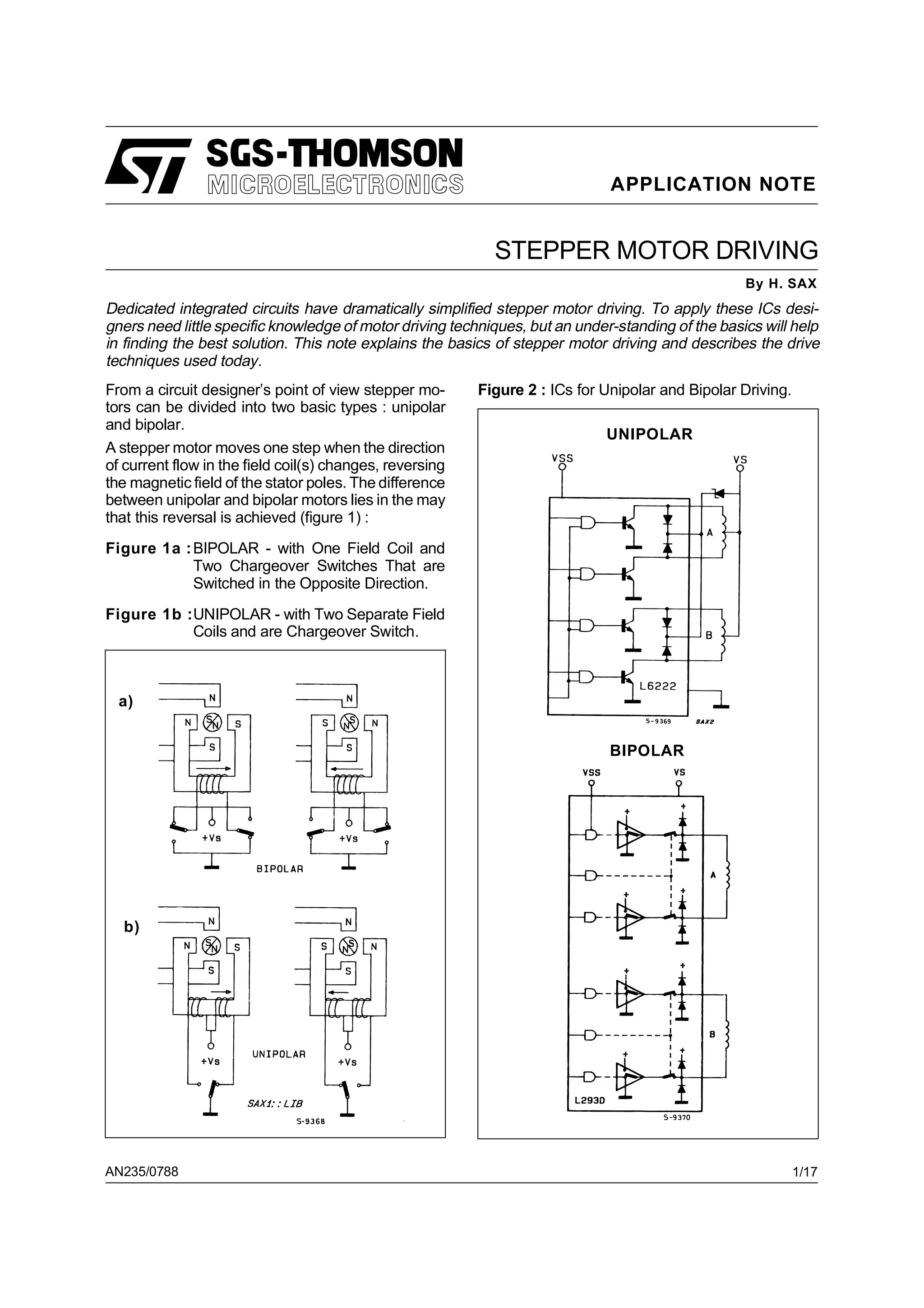
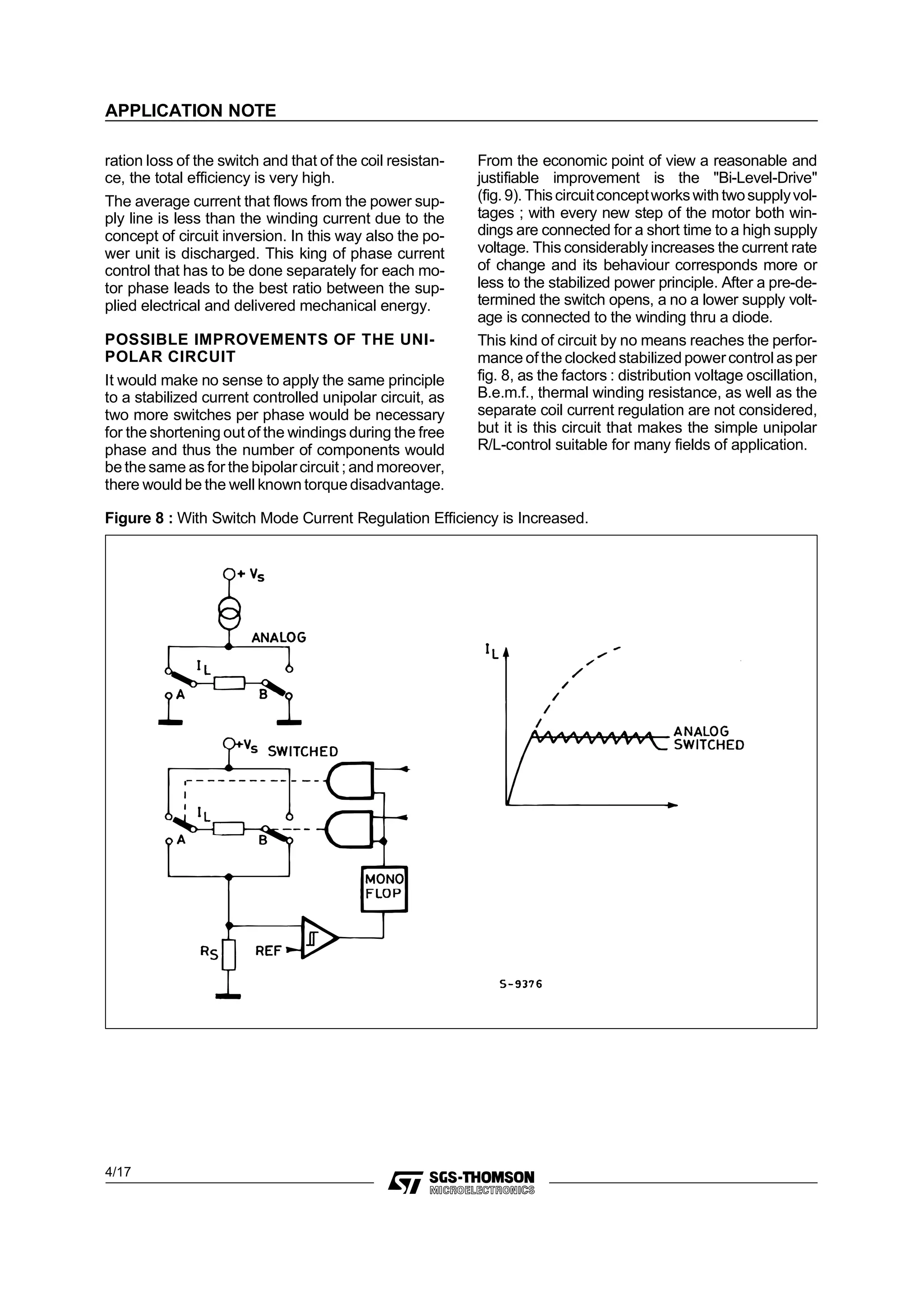
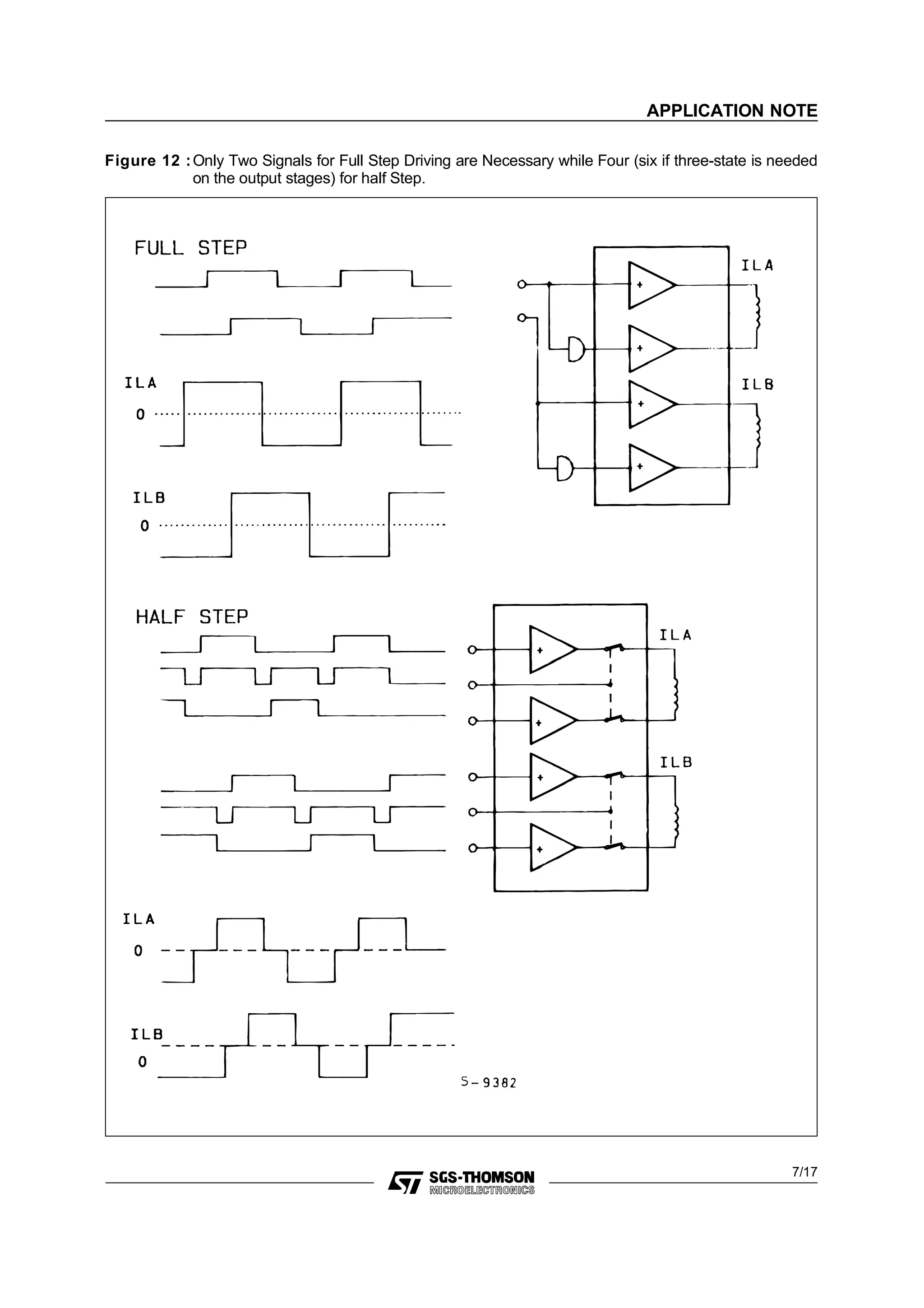
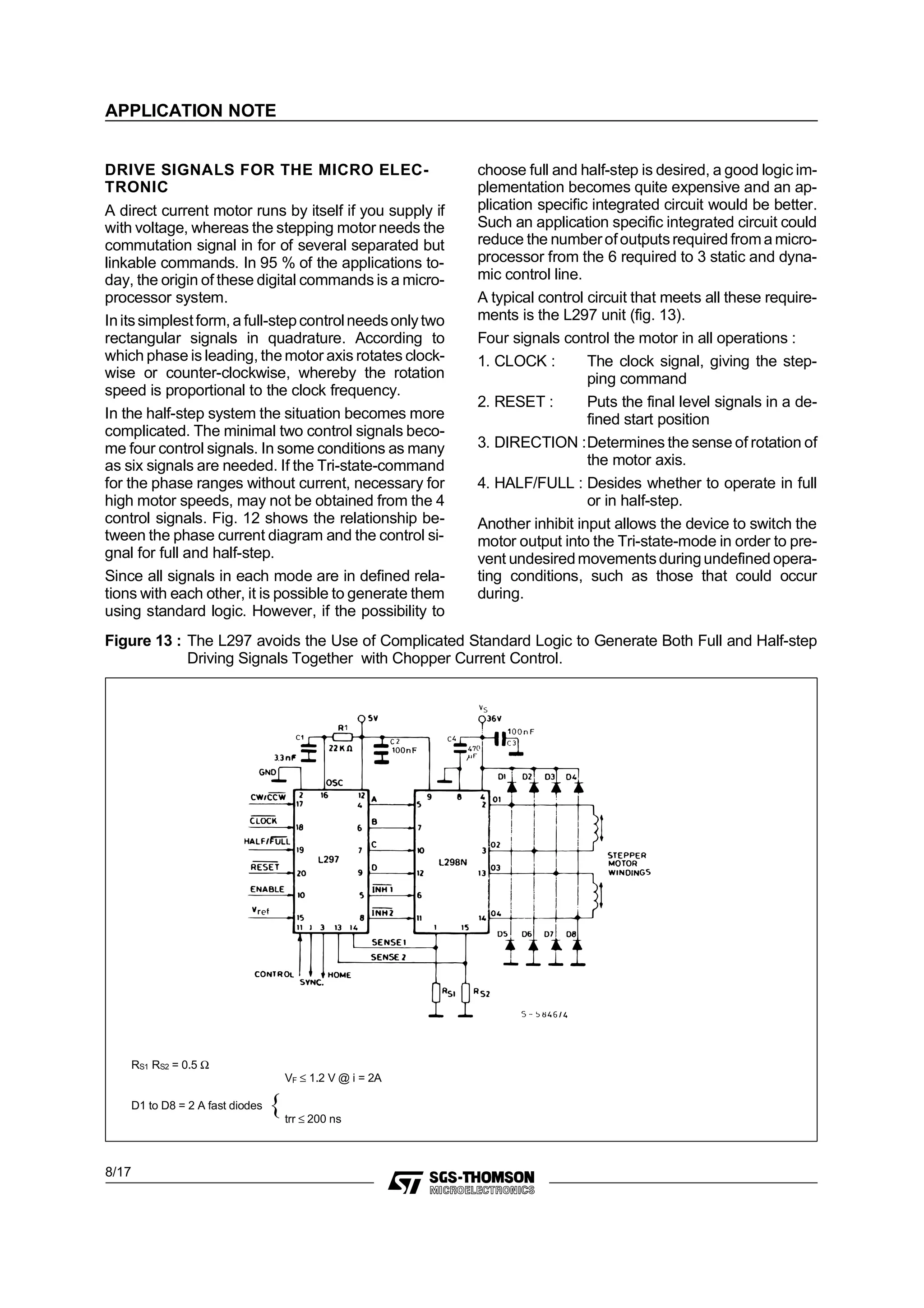
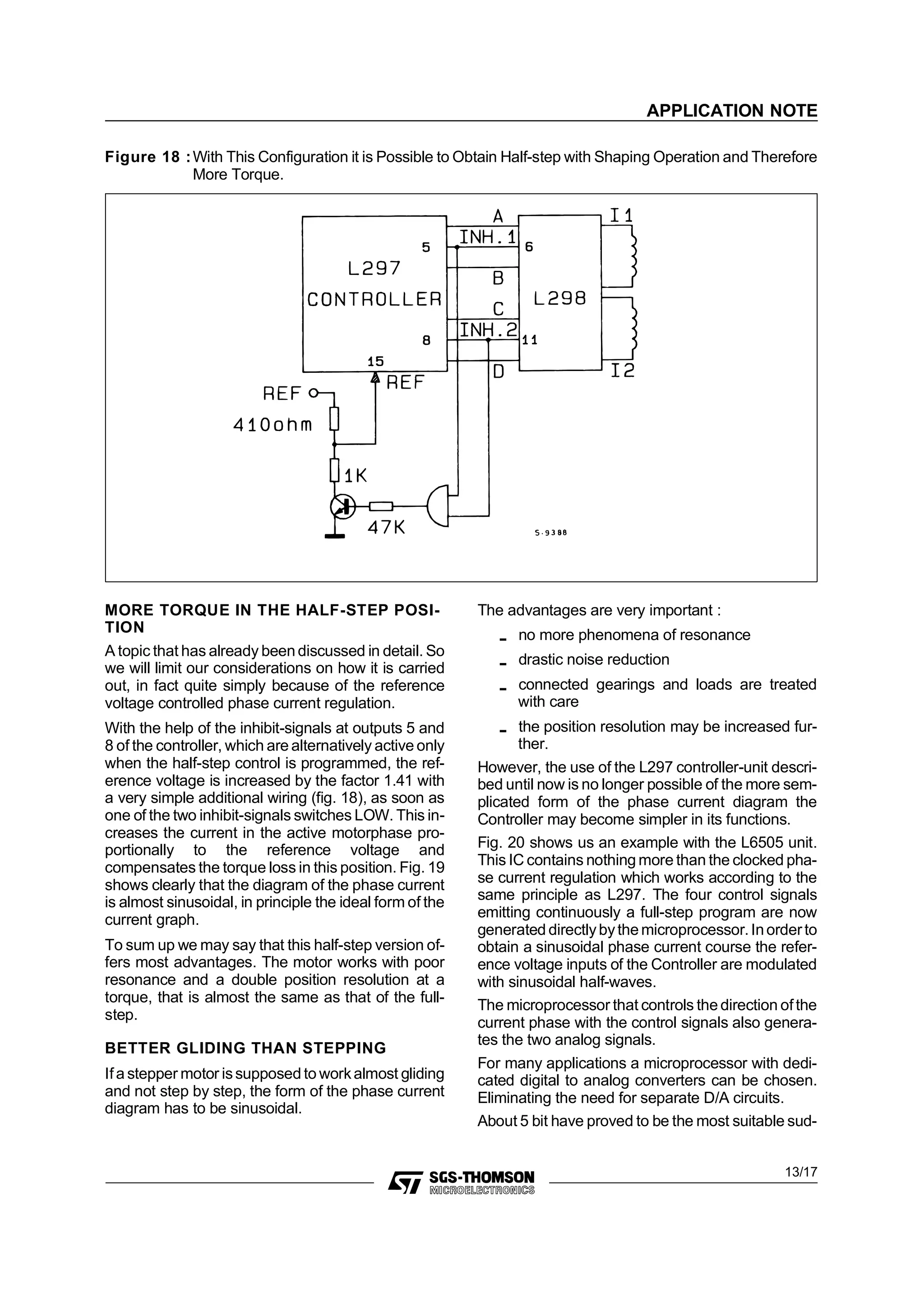
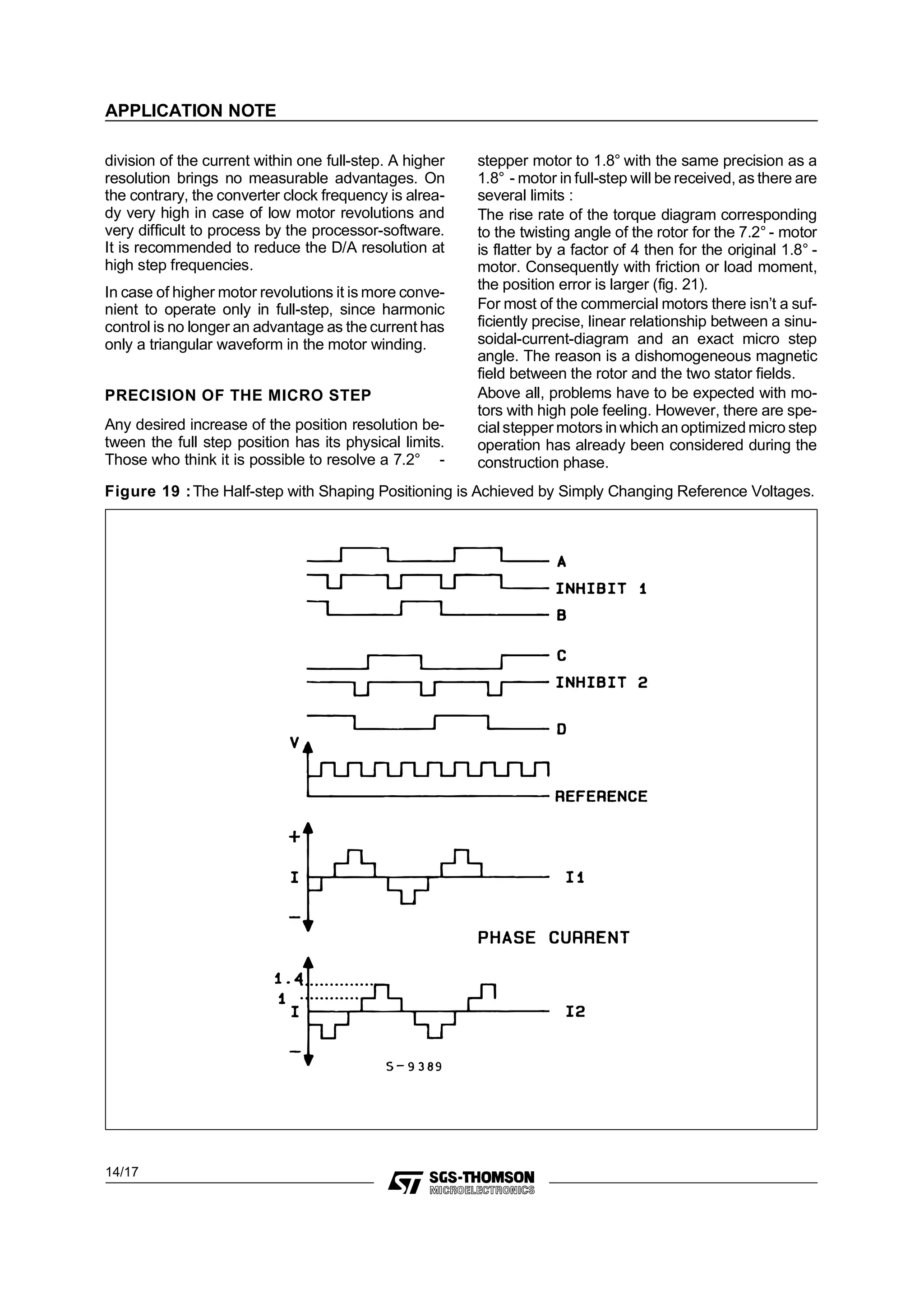
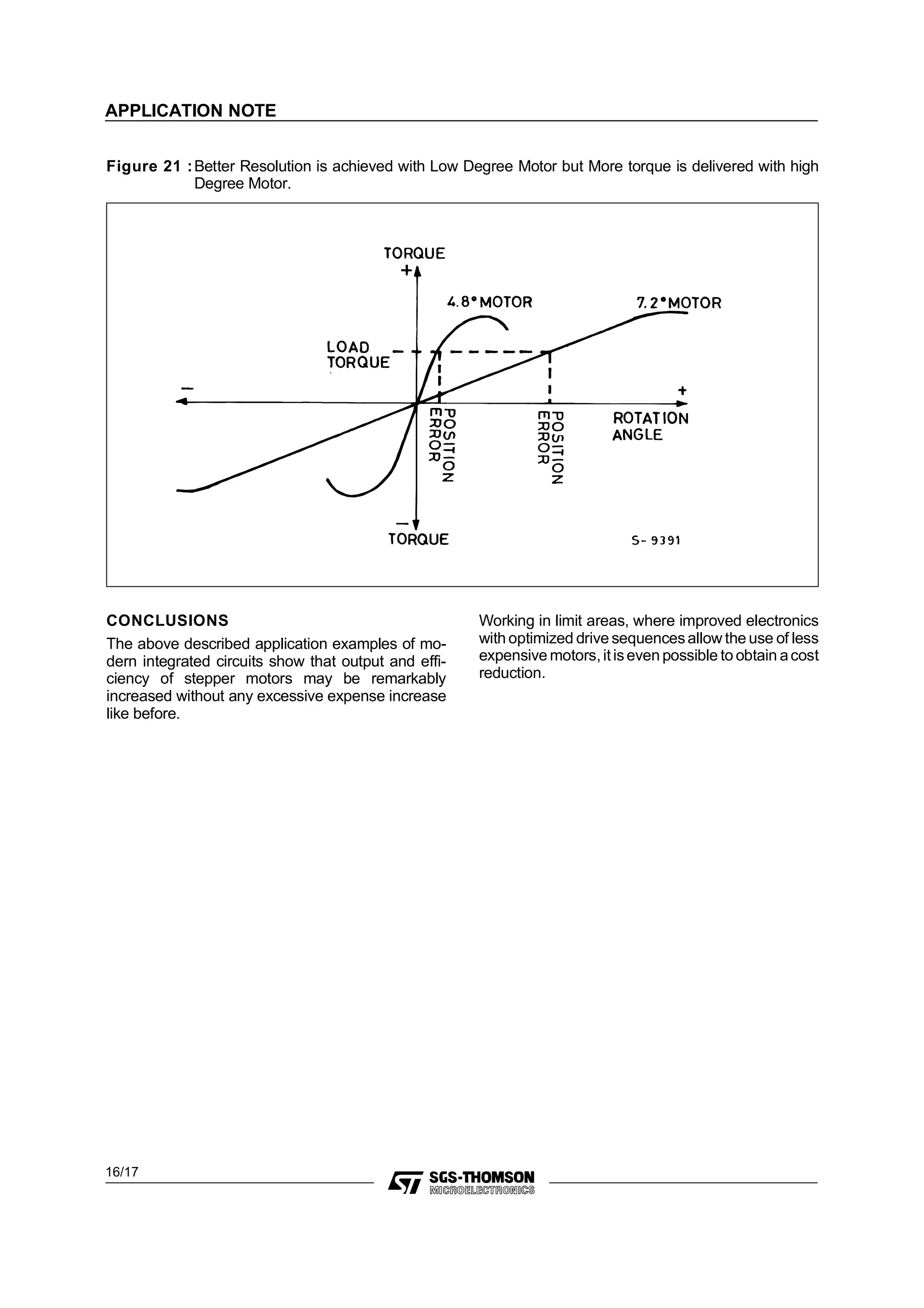
This document discusses stepper motor driving techniques. It begins by explaining the differences between unipolar and bipolar stepper motors. Unipolar motors have two separate field coils, while bipolar motors have one field coil and two switching circuits. The document then discusses various circuit designs for driving unipolar and bipolar motors, including those that use integrated circuits. It explains that bipolar motors can produce more torque than unipolar motors of the same size due to their circuit design. The document also covers techniques for constant current driving and improving efficiency, such as switched current regulation. It analyzes advantages and disadvantages of half-step operation for stepper motors.