Download as PPSX, PPTX

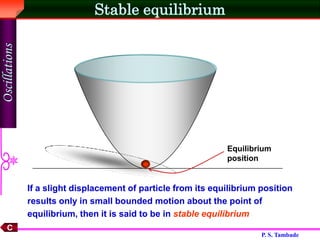





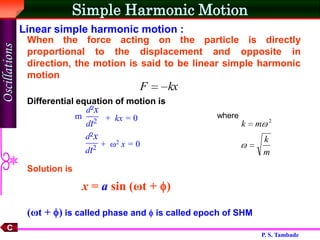





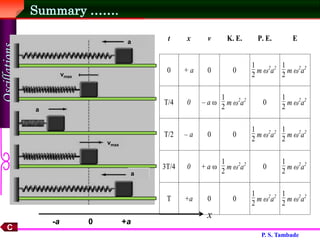



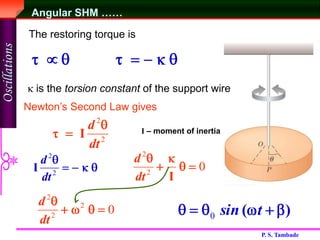
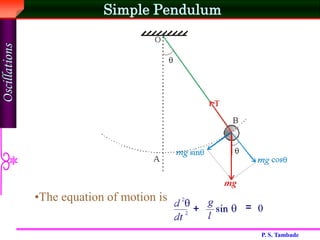




Simple harmonic motion (SHM) is oscillatory motion where the restoring force is directly proportional to the displacement. SHM includes the motion of a spring-mass system and a simple pendulum with small oscillations. The displacement of SHM follows the equation x = a sin(ωt + φ), where a is the amplitude, ω is the angular frequency, t is time, and φ is the phase. The period and frequency depend only on the spring constant or mass and gravitational field. Energy oscillates between potential and kinetic forms with the total mechanical energy conserved.





































![Friction (2) [compatibility mode]](https://cdn.slidesharecdn.com/ss_thumbnails/friction2compatibilitymode-100415053857-phpapp01-thumbnail.jpg?width=640&height=640&fit=bounds)
![Friction [compatibility mode]](https://cdn.slidesharecdn.com/ss_thumbnails/frictioncompatibilitymode-100415053915-phpapp01-thumbnail.jpg?width=640&height=640&fit=bounds)






![Week 8 [compatibility mode]](https://cdn.slidesharecdn.com/ss_thumbnails/week8compatibilitymode-130213163443-phpapp01-thumbnail.jpg?width=640&height=640&fit=bounds)




























