Download as PDF, PPTX
![Page 9 The Institute of Signal Processing and Control Systems
Southern Federal University
Convergence
0 10 20 30 40 50
-8
-7.9
-7.8
-7.7
-7.6
-7.5
-7.4
-7.3
-7.2
-7.1
-7
Iteration #
EsN0, dB
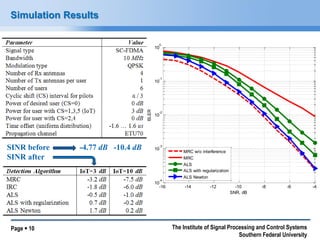
[Convergence] EsN0 for FER=10-2
the method of gradient descent
Gauss-Newton
Gauss-Newton (휇 = 0)
Gradient descent (휇 → 푖푛푓)
Fix 휇 = 60
Adaptive 휇
If Λ > 0.0,
푠푒푡 휇 <= 휇 max
1
3
, 1 − 2Λ − 1 3 ;
Otherwise,
휇 <= 2휇.
Λ푖 = Λ푖−1 + 2휇 퐻 − 퐻 푅
20 iters.](https://image.slidesharecdn.com/sharingtelfor2014-141126033249-conversion-gate02/85/Non-Linear-Optimization-Scheme-for-Non-Orthogonal-Multiuser-Access-9-320.jpg)

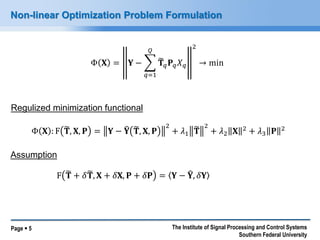
The document presents a non-linear optimization scheme for non-orthogonal multiuser access aimed at future high-capacity communication systems. It discusses the issues related to intra-cell interference and provides mathematical models to address these challenges, along with various optimization methods including Tikhonov regularization and the Levenberg-Marquardt approach. The findings indicate that significant improvements can be achieved in wireless communication systems through these optimizations and highlight future research directions.