Download to read offline

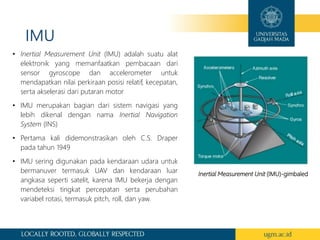
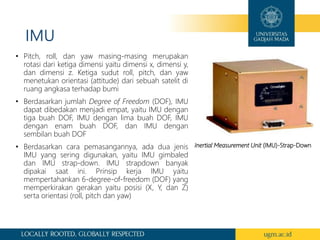
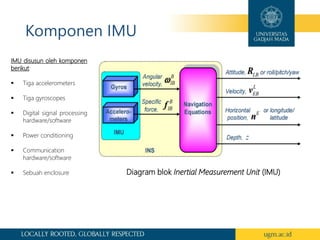



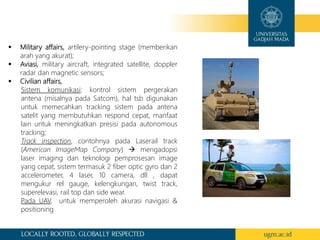

Dokumen ini membahas tentang integrasi sensor orientasi seperti Inertial Measurement Unit (IMU) dan Inertial Navigation System (INS) yang digunakan untuk mengendalikan dan menentukan orientasi satelit mikro. IMU yang terdiri dari accelerometer dan gyroscope berfungsi untuk memperkirakan posisi, kecepatan, dan akselerasi, meskipun terdapat kesalahan yang dapat memengaruhi pengukuran. Aplikasi teknologi ini meliputi penggunaan dalam kendaraan udara dan sistem komunikasi untuk meningkatkan presisi navigasi.









































































