Downloaded 36 times



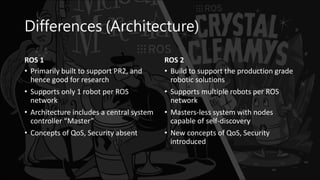
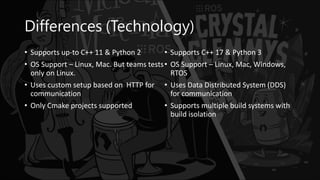



The document compares ROS 1 and ROS 2, outlining their similarities in distributed computing and language neutrality, while highlighting differences in architecture and technology. ROS 1 is more research-focused with a centralized 'master' system and limited to one robot, whereas ROS 2 is designed for production with support for multiple robots, self-discovery of nodes, and enhanced security. Key technological advancements in ROS 2 include support for C++17, Python 3, and multiple operating systems.























![[오픈소스컨설팅]RHEL7/CentOS7 Pacemaker기반-HA시스템구성-v1.0](https://cdn.slidesharecdn.com/ss_thumbnails/rhel-centos7-pacemaker-based-ha-admin-guidev1-151215000535-thumbnail.jpg?width=640&height=640&fit=bounds)
















![Robot operating system [ROS]](https://cdn.slidesharecdn.com/ss_thumbnails/robotoperatingsystemautosaved-200614222945-thumbnail.jpg?width=640&height=640&fit=bounds)



![Getting Started with Apache Spark: Big Data Made Simple [Free Meetup]](https://cdn.slidesharecdn.com/ss_thumbnails/apachesparkgettingstarted-260203175547-8361bcc3-thumbnail.jpg?width=640&height=640&fit=bounds)


















