Download as PDF, PPTX


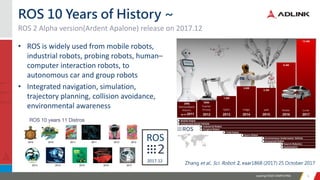
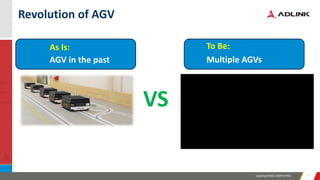
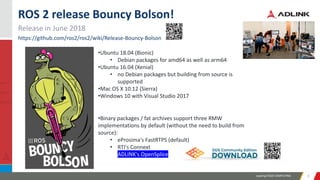
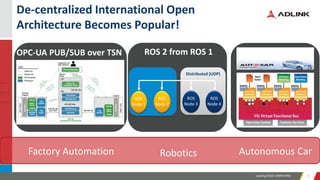


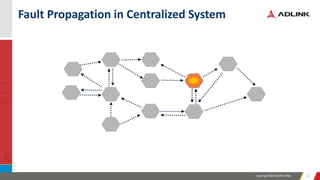
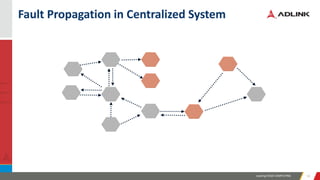
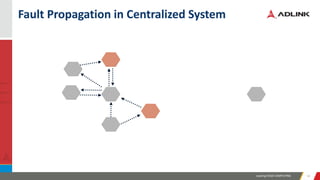
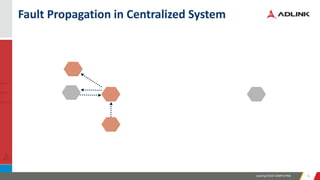



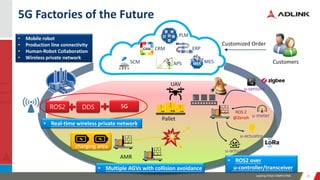
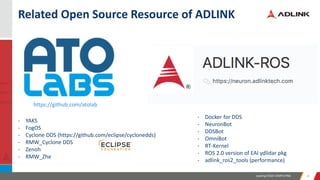
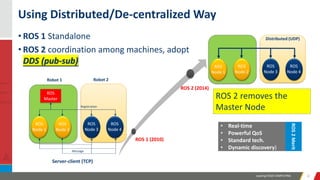
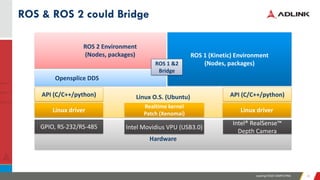
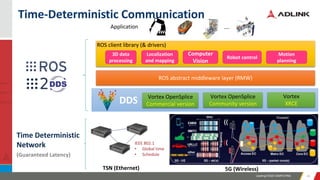
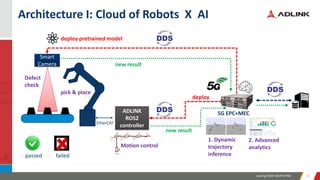
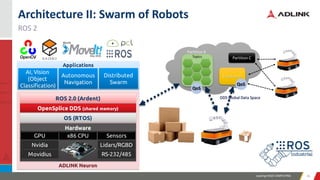





This document discusses the use of Robot Operating System 2 (ROS 2) and Data Distribution Service (DDS) for smart manufacturing. ROS 2 is an open-source robotics middleware that has gained popularity for use in mobile robots, industrial robots, and autonomous vehicles. It allows for distributed, decentralized control through the use of DDS as its underlying middleware for data distribution. The document outlines the history and releases of ROS 2, its advantages over a centralized ROS 1 architecture, and examples of its use in industrial applications such as multiple autonomous guided vehicles (AGVs) and 5G factory networks.









![[OpenStack Days Korea 2016] Track1 - All flash CEPH 구성 및 최적화](https://cdn.slidesharecdn.com/ss_thumbnails/12skt-160226171513-thumbnail.jpg?width=640&height=640&fit=bounds)




































































![Getting Started with Apache Spark: Big Data Made Simple [Free Meetup]](https://cdn.slidesharecdn.com/ss_thumbnails/apachesparkgettingstarted-260203175547-8361bcc3-thumbnail.jpg?width=640&height=640&fit=bounds)








