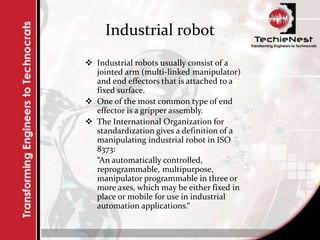
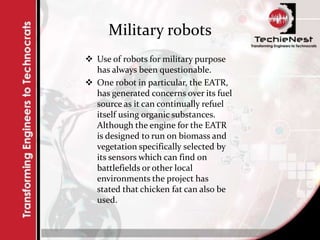
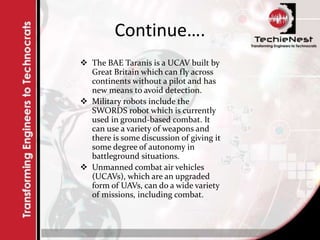
The document provides an overview of robots, defining them as mechanical or virtual agents that perform tasks typically needing human effort, and categorizes them into various types such as industrial, service, and military robots. It discusses the historical development of robotics from early mechanical devices to modern autonomous machines, highlighting key innovations and the role of electronics. The document also describes contemporary uses, distinguishing between general-purpose and dedicated-purpose robots, while noting the growing presence of robots in everyday life and industry.