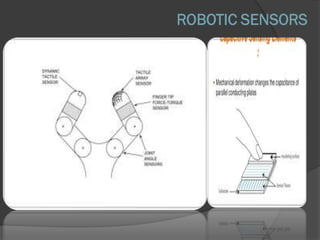
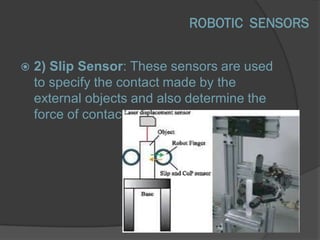
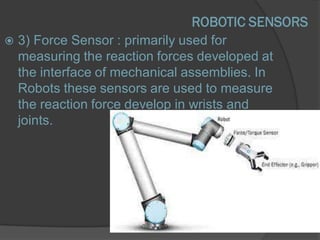
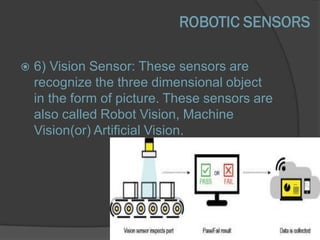
The document discusses different types of sensors used in robotics, including touch sensors to detect contact, slip sensors to measure contact force, force sensors to measure reaction forces in joints and wrists, range sensors to measure distance using photoelectric devices, proximity sensors to detect nearby objects without contact, and vision sensors to recognize 3D objects through images.