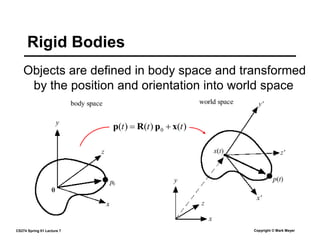
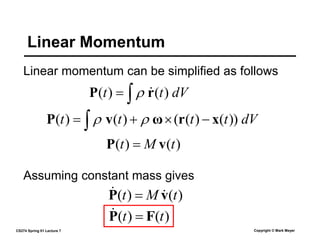
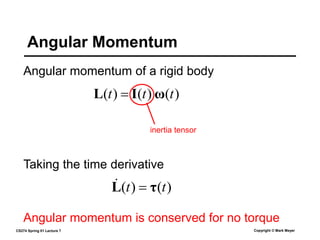
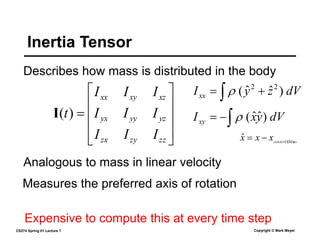
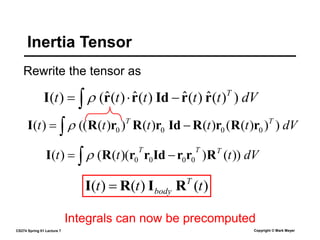
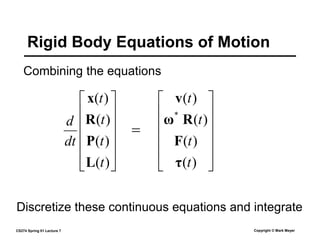
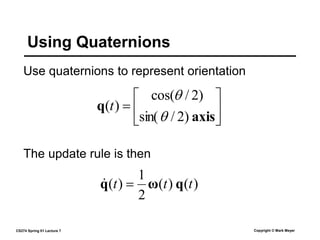
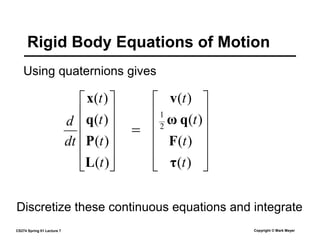
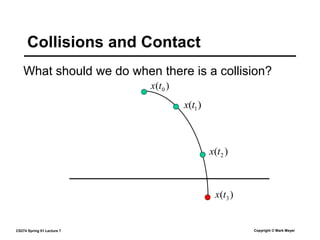
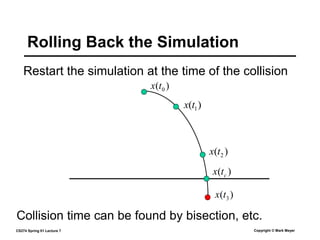
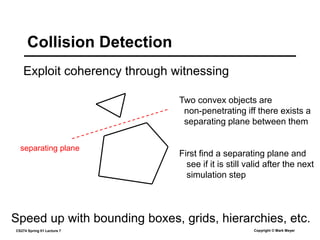
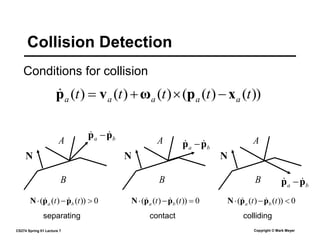
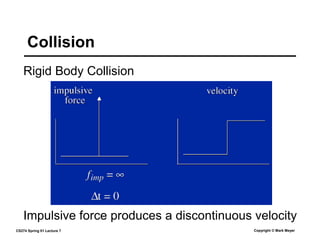
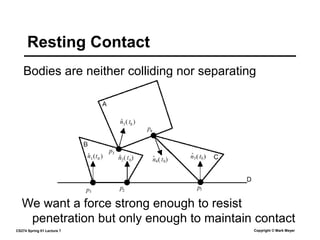
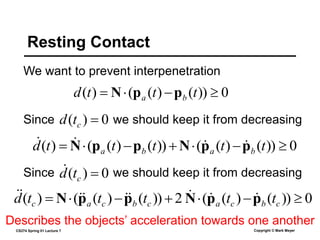
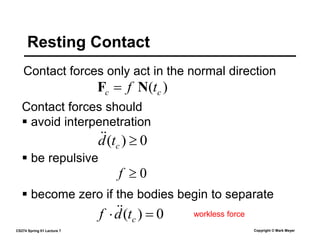
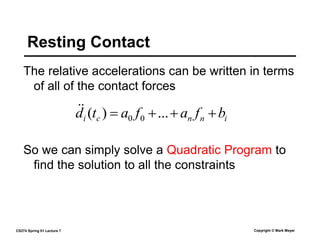
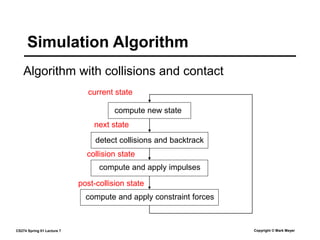
This document summarizes a lecture on rigid body dynamics. It discusses key concepts like rigid bodies having both position and orientation, linear and angular velocity, linear and angular momentum. It covers equations of motion for rigid bodies using quantities like inertia tensor and torque. It also discusses collision detection and response methods like impulse-based collision resolution and resting contact models to prevent object interpenetration.



























































![谷歌留痕技术 [ 𝙩𝙤𝙥 𝟮𝟯𝟯. 𝙘 𝙤𝙢 ]](https://cdn.slidesharecdn.com/ss_thumbnails/top233-260130174328-3833018c-thumbnail.jpg?width=640&height=640&fit=bounds)





