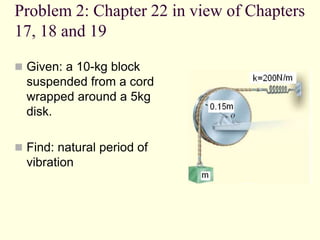
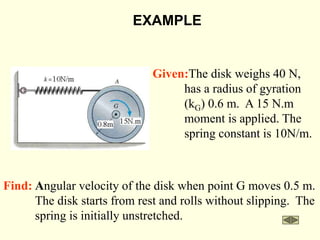
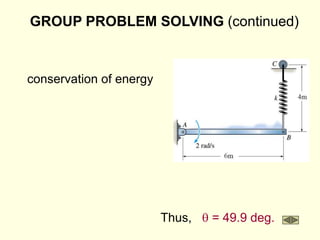
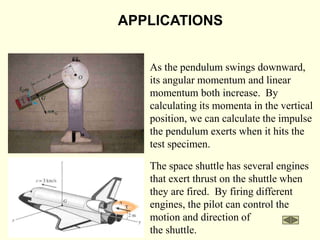
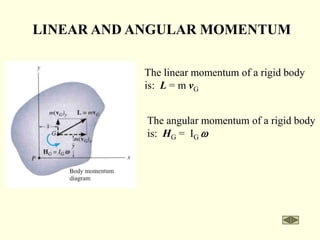
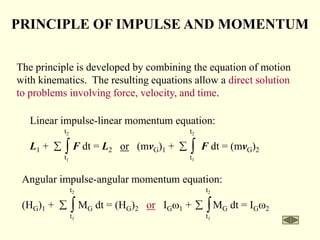
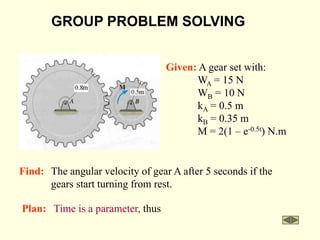
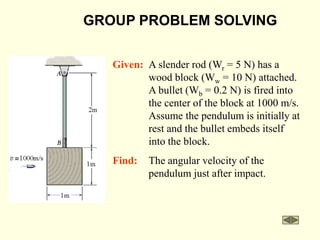
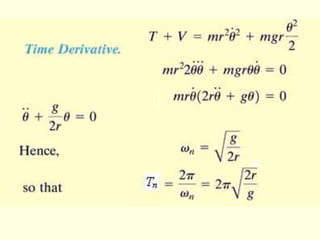
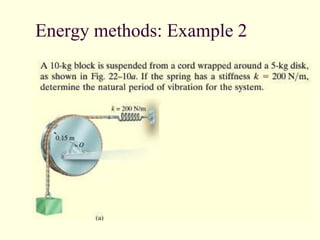
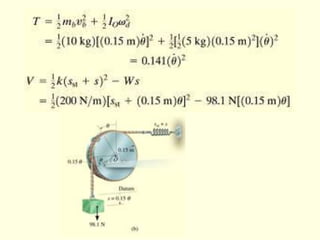
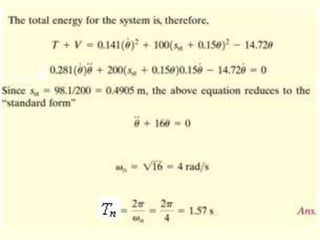
The document covers the principles of work, energy, and momentum related to rigid bodies in motion, detailing kinetic energy calculations, the work done by forces, and the conservation of energy. It explains the applications of these principles through various examples and equations, focusing on rotational and translational dynamics. Additionally, it introduces impulse and momentum analysis, providing insight into how these concepts apply to real-world scenarios like pendulums and gear systems.
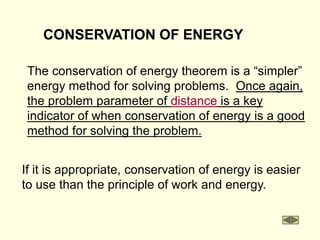
![WORK OF A FORCE
The work done by a force is
UF = F•dr = (F cos θ) ds
Constant force : UFc = (Fc cos θ)s
s
Work of a weight: Uw = -WΔy.
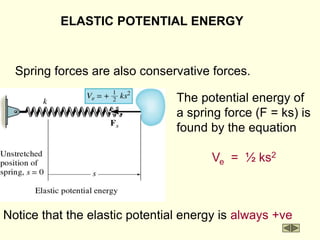
Work of a spring force:
Us = -0.5k[(s2)2 – (s1)2]](https://image.slidesharecdn.com/dyn-part3-220822230836-506ed3a8/85/dyn-part3-ppt-5-320.jpg)
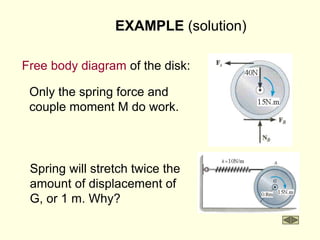
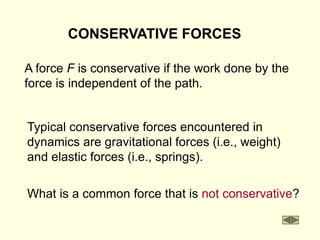
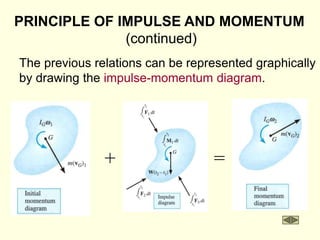
![EXAMPLE (continued)
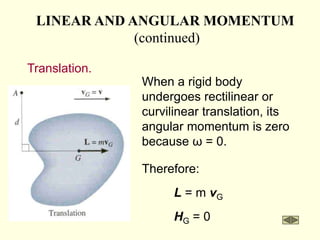
Work: U1-2 = -0.5k[(s2)2 – (s1)2] + M(q2 – q1)
U1-2 = -0.5(10)(12 – 0) + 15(0.5/0.8) = 4.4N.m
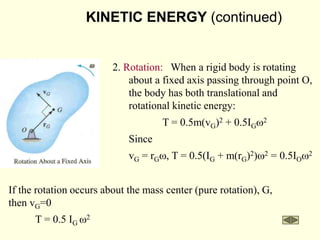
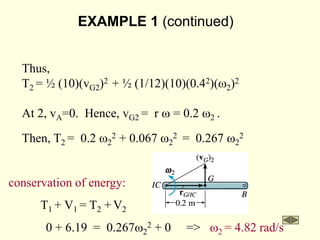
Kinematic relation: vG = r w = 0.8w
Kinetic energy: T1 = 0
T2 = 0.5m (vG)2 + 0.5 IG w2
T2 = 0.5(40/9.8)(0.8w)2 + 0.5(40/9.8)(0.6)2w2
T2 = 2.0 w2
Work and energy: U1-2 = T12
4.4 = 2.0 w2
w = 1.5 rad/s](https://image.slidesharecdn.com/dyn-part3-220822230836-506ed3a8/85/dyn-part3-ppt-11-320.jpg)


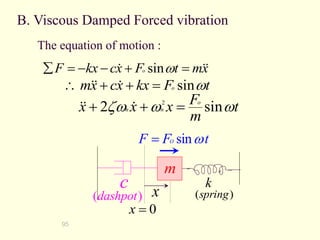
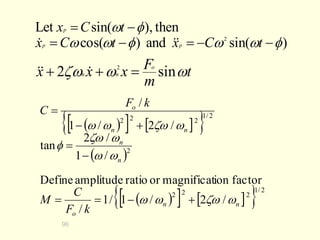
![93
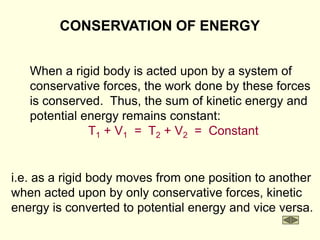
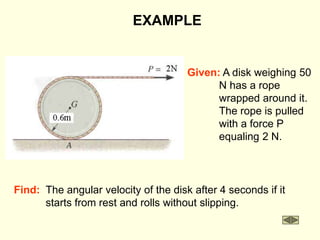
Case 3: < 1 (underdamping) :
t
t
i
t
i n
n
n
e
e
A
e
A
x w
w
w
= )
(
2
2
1
2
1
1
2
1
w
w
= n
d
Define damped natural frequency
d
1
x 2
x
1
t 2
t
x
t
)
sin(
)
(
]
e
2
2
and
e
2
1
Let
conjucate.
complex
are
2
and
1
that
so
real,
is
[
)
( 2
1
w
w
=
=
=
w
w
w
=
t
d
t
n
Ce
x
i
C
A
i
C
A
A
A
x
t
t
i
t
i n
d
d
e
e
A
e
A
x
Period d = 2/wd](https://image.slidesharecdn.com/dyn-part3-220822230836-506ed3a8/85/dyn-part3-ppt-93-320.jpg)
![97
M
n
w
w /
1
1
0
=
1
.
0
=
2
.
0
=
1
=
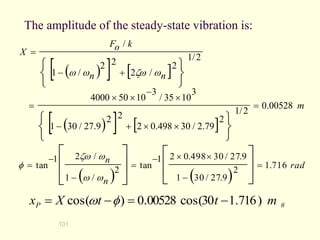
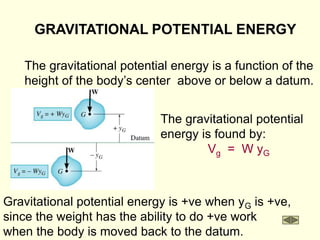
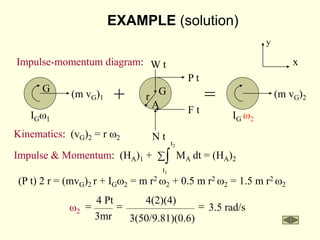
Maximum M occurs at: 0
}
)
2
(
]
)
(
1
{[
d
d 2
2
2 =
n
n w
w
w
w
w
n
res w
w 2
1 2
=
The resonance frequency is](https://image.slidesharecdn.com/dyn-part3-220822230836-506ed3a8/85/dyn-part3-ppt-97-320.jpg)