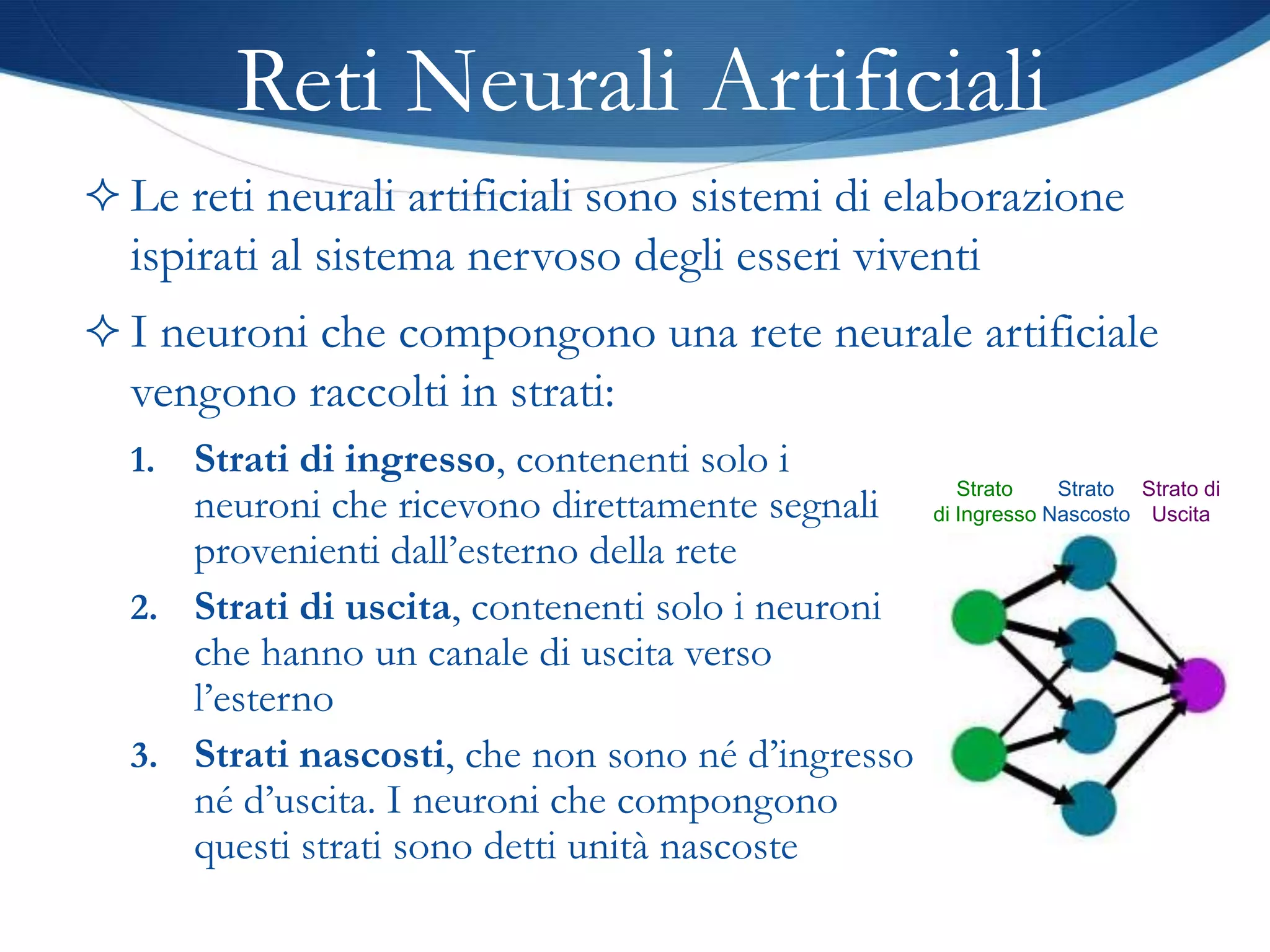
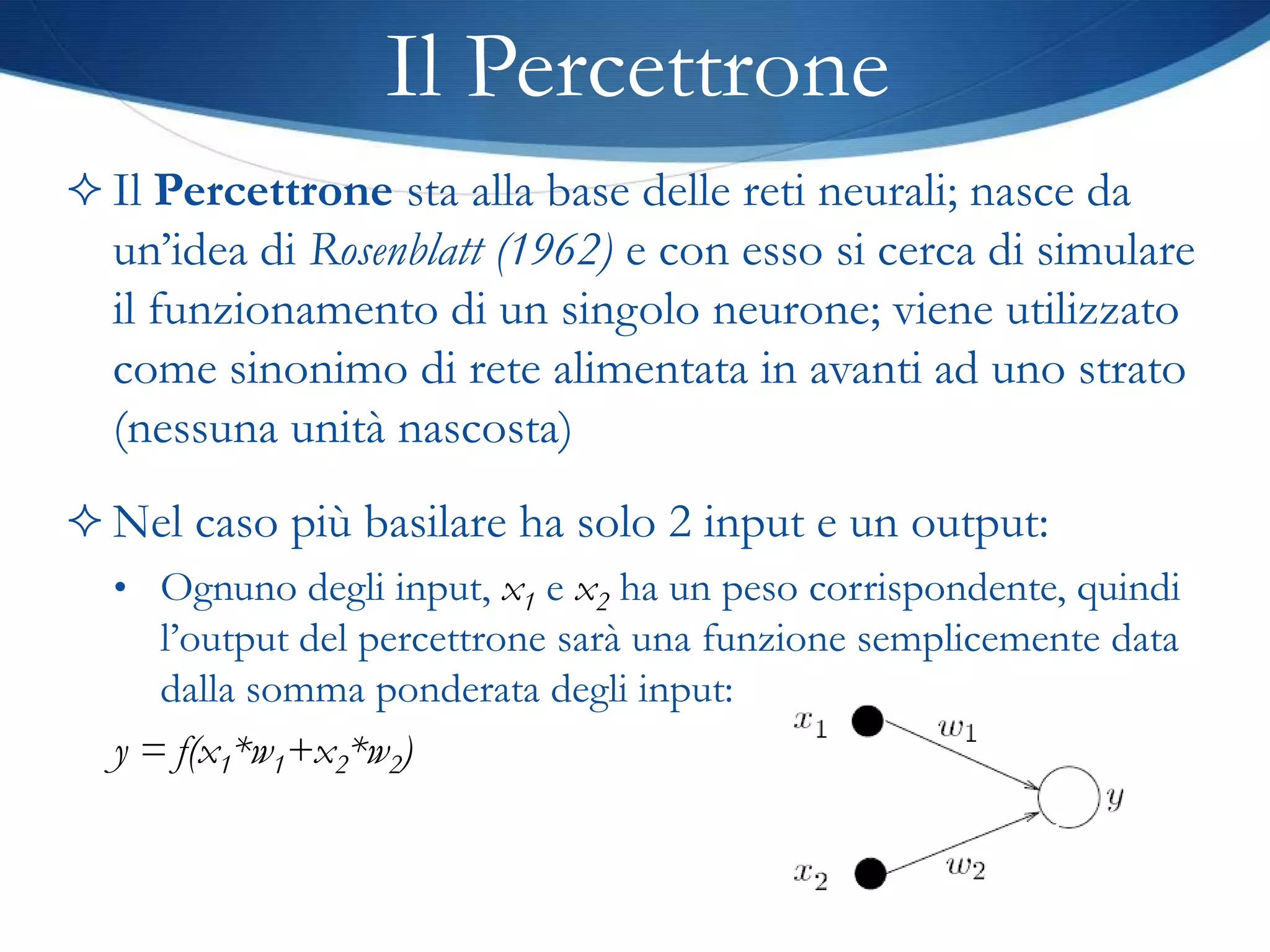
Il documento presenta una tesi di laurea sull'intelligenza artificiale, evidenziando le differenze tra il funzionamento del cervello umano e dei calcolatori nell'apprendimento e nella risoluzione dei problemi. Viene descritta la struttura delle reti neurali biologiche e artificiali, nonché i vari paradigmi di apprendimento automatico. Inoltre, si discutono le applicazioni, i vantaggi e i limiti delle reti neurali nel risolvere problemi complessi.













































![[SLIDE] Tecniche basate su machine learning per la determinazione del profilo...](https://cdn.slidesharecdn.com/ss_thumbnails/laderchi-151109180727-lva1-app6892-thumbnail.jpg?width=640&height=640&fit=bounds)

































