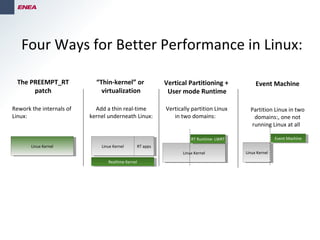
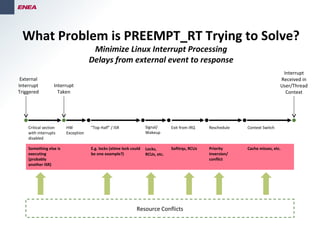
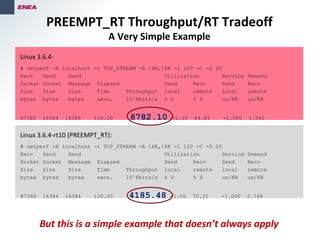
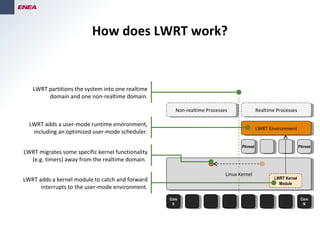
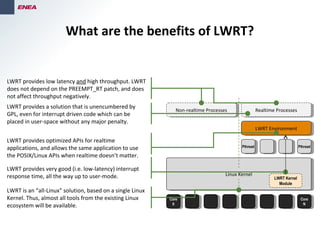
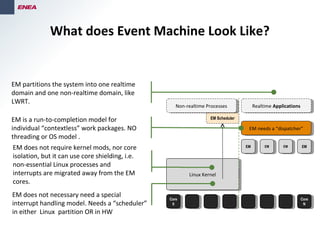
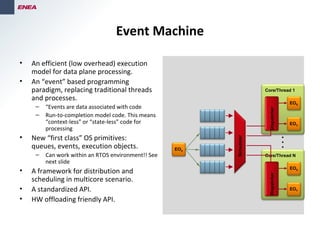
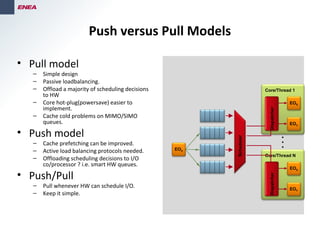
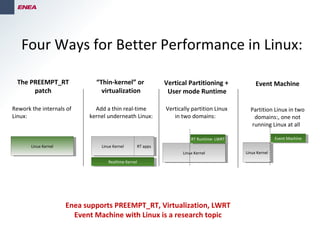
This document discusses four approaches to improving Linux performance in embedded multicore devices: 1) the Linux PREEMPT_RT patch set, which replaces kernel spinlocks with mutexes to improve real-time responsiveness but can reduce throughput; 2) LWRT, which partitions Linux into real-time and non-real-time domains to avoid using the kernel and improves both real-time performance and throughput; 3) the Open Event Machine, which partitions Linux and runs some processes on a non-Linux runtime; and 4) hypervisors or "thin kernels", which add a real-time kernel underneath Linux. The document focuses on explaining LWRT and how it compares to PREEMPT_RT in improving both real