Downloaded 167 times


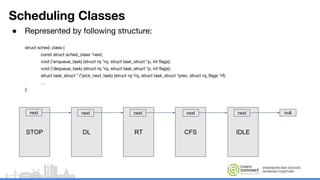
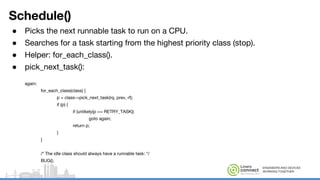
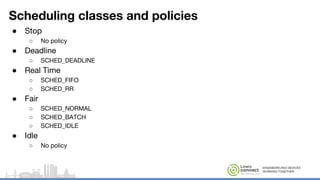
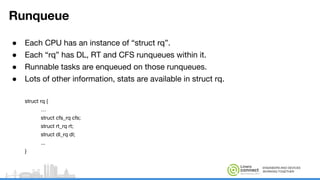
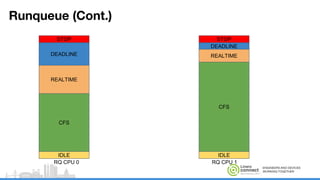


The document provides an overview of the Linux kernel scheduler, detailing its components such as CPU scheduling, scheduling classes, and the O(1) scheduler. It describes the current scheduler design as introduced in version 2.6.23, explaining the functionalities and purposes of different scheduling classes like stop, deadline, realtime, CFS, and idle. Additionally, it covers the structure of runqueues and the mechanisms for task selection and management within the scheduler.