Downloaded 25 times


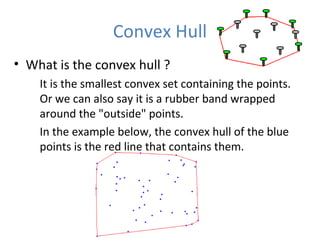







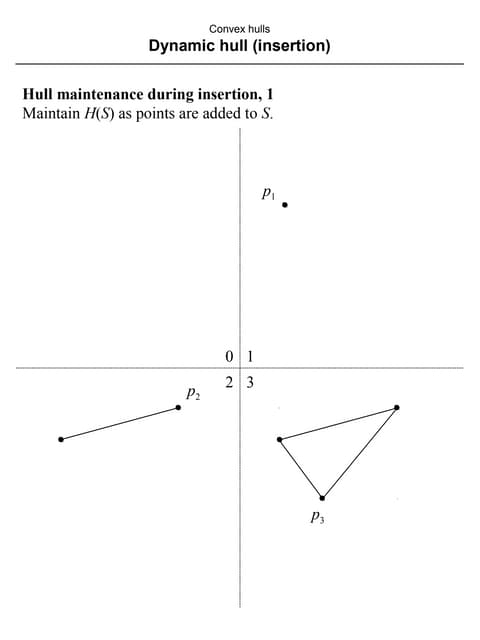
Computational geometry is the study of algorithms for manipulating geometric objects. It deals with problems involving geometric input and digital output. The goal is to provide basic geometric tools for applications in computer graphics, computer vision, robotics, and more. While it primarily focuses on flat 2D objects, discrete computational geometry bridges the gap between continuous phenomena and computer representation by approximating geometry discretely. Key applications of discrete computational geometry include convex hulls, triangulations, and Voronoi diagrams. Common algorithms for finding the convex hull include Jarvis march, Graham's scan, and divide and conquer approaches.






















![On the Convex Layers of a Planer Dynamic Set of Points [Short Version]](https://cdn.slidesharecdn.com/ss_thumbnails/mphillayersmod1f-180628051342-thumbnail.jpg?width=640&height=640&fit=bounds)