Download to read offline
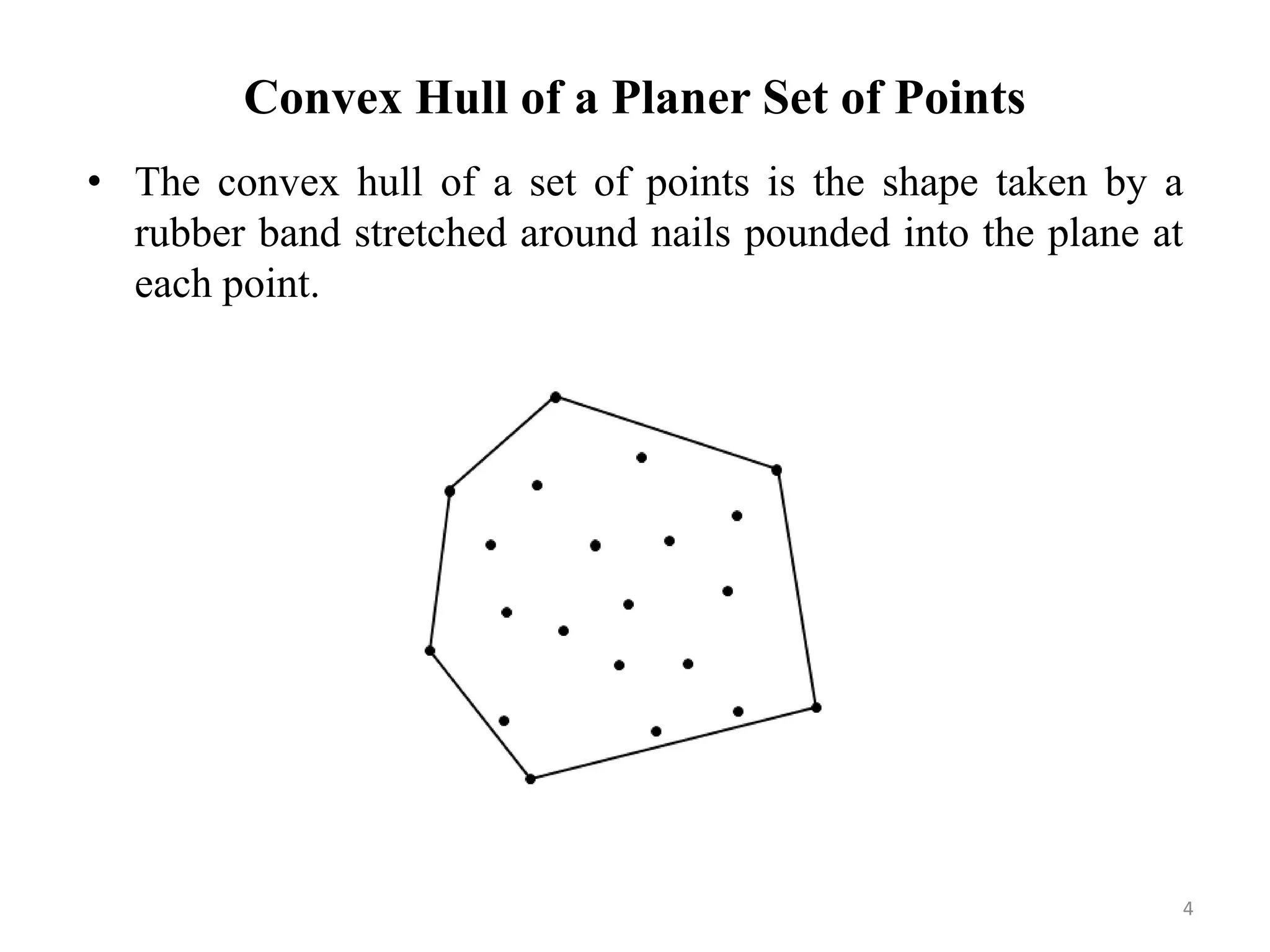
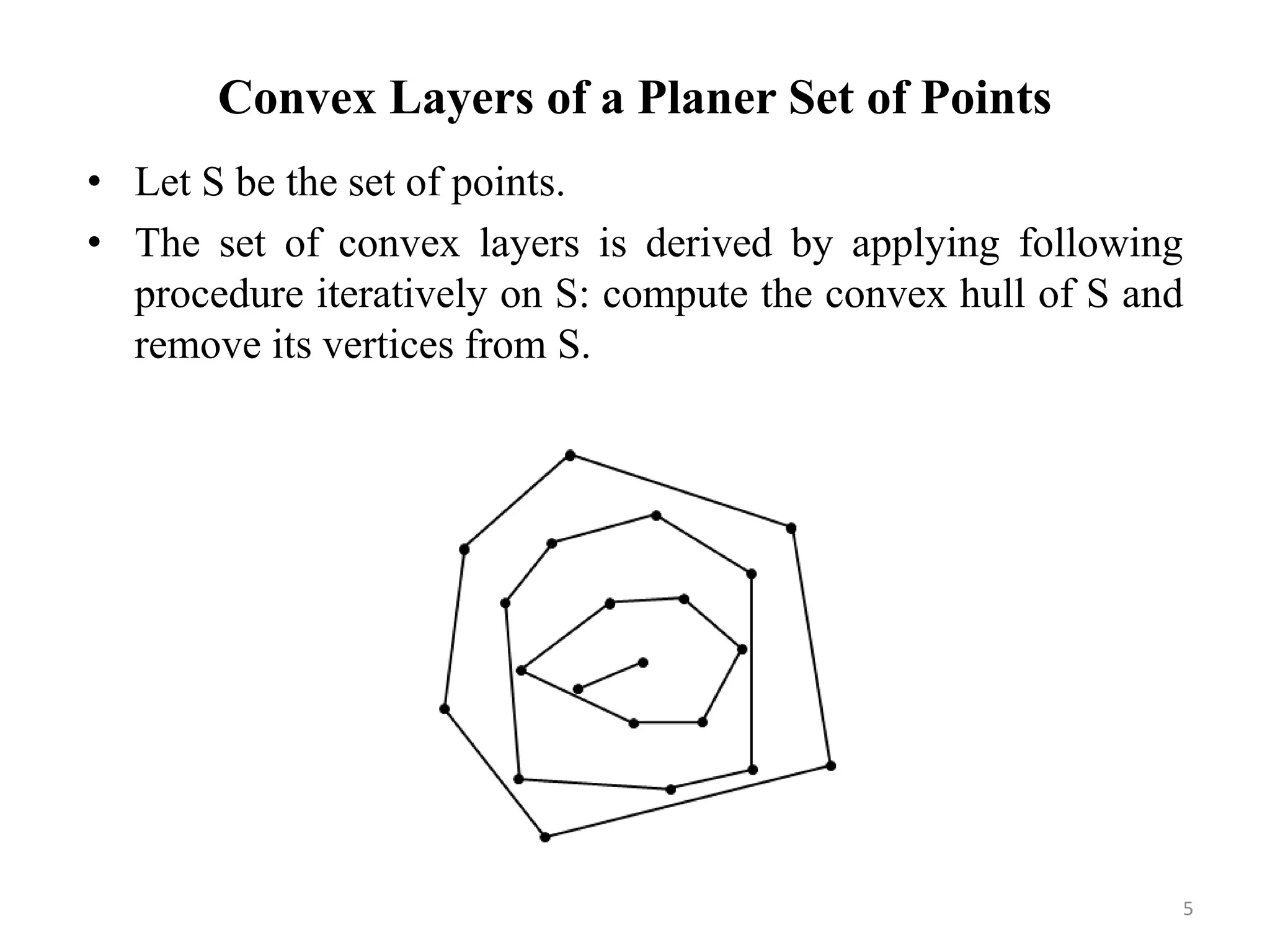

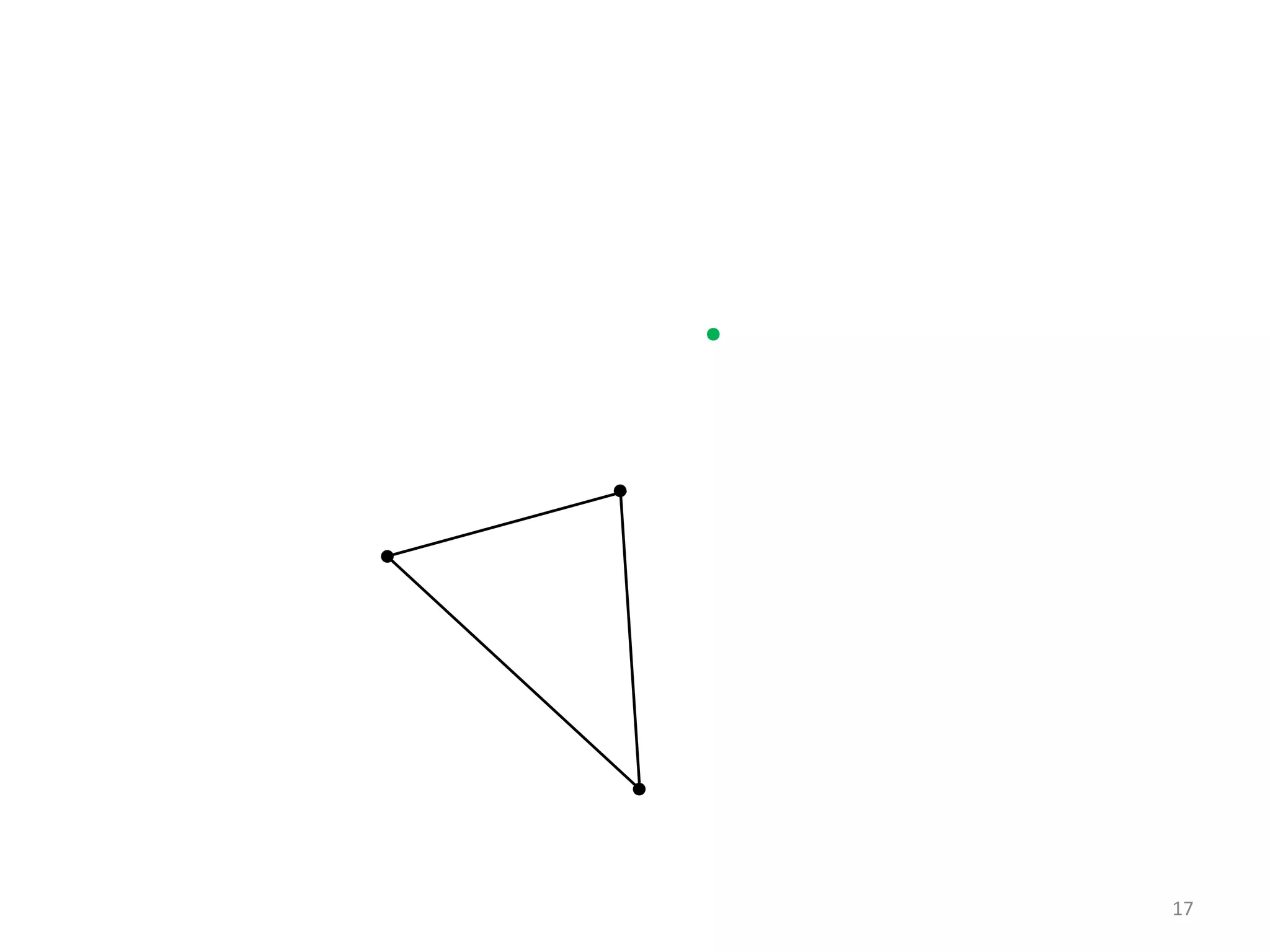
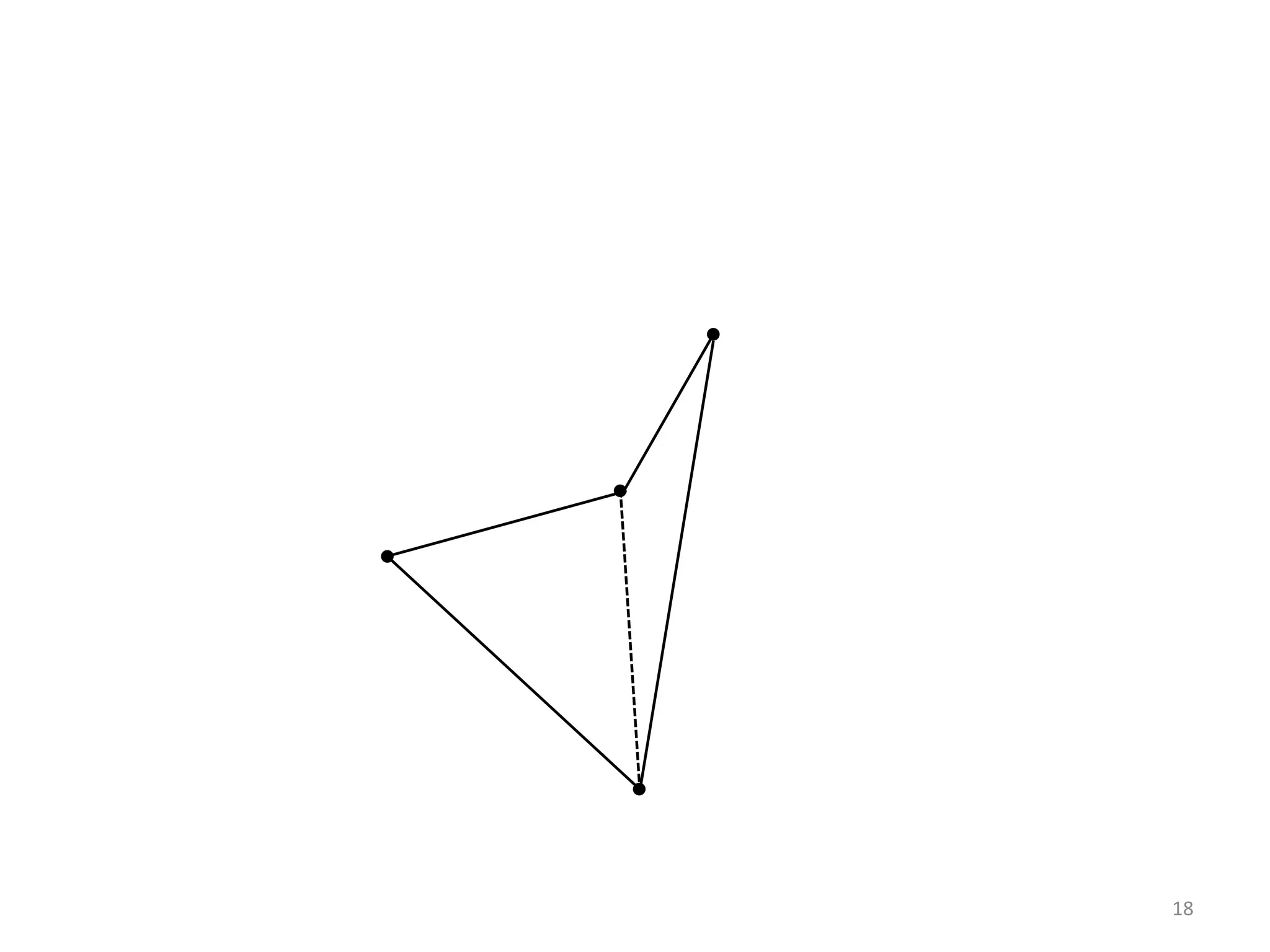
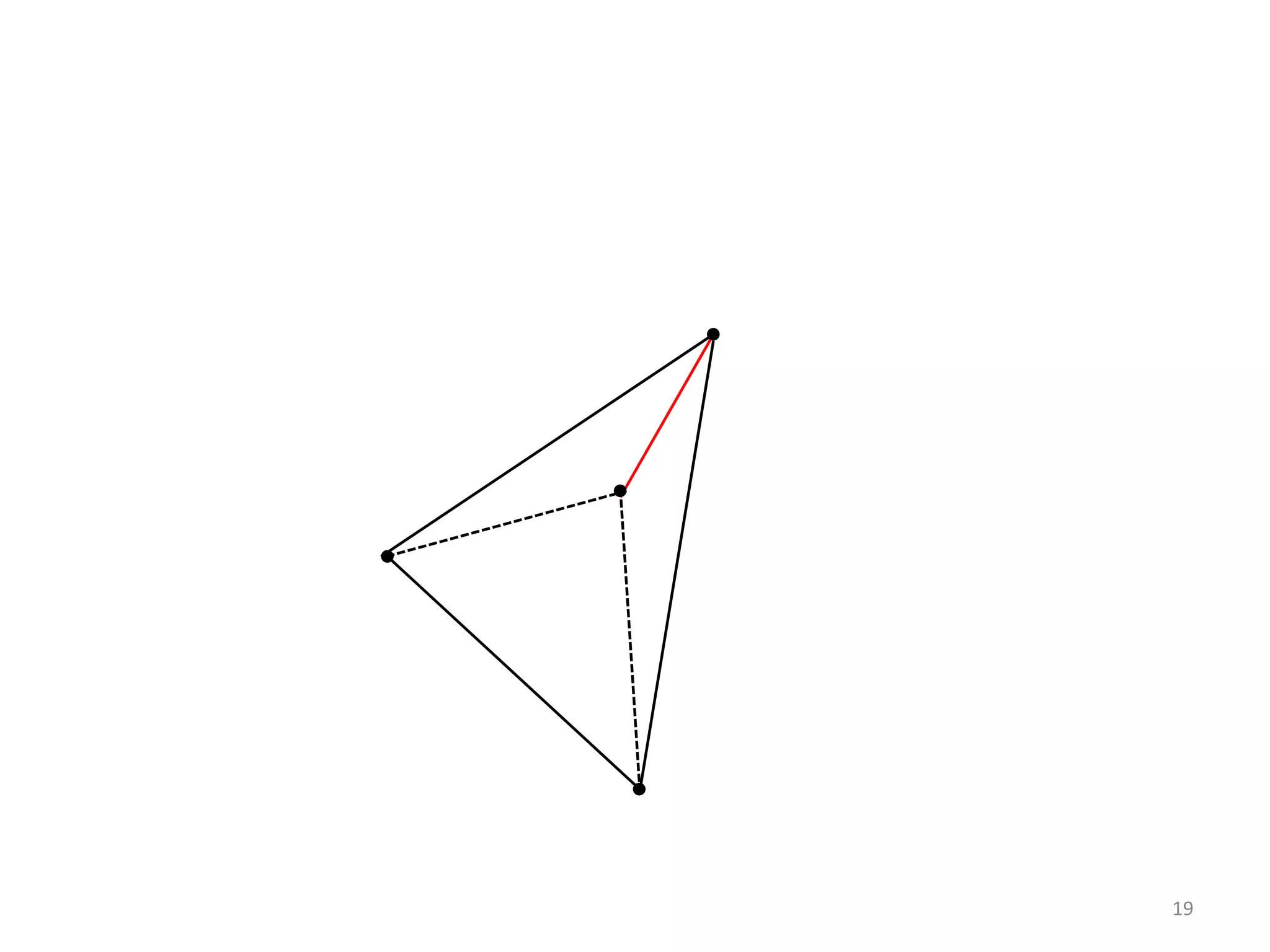
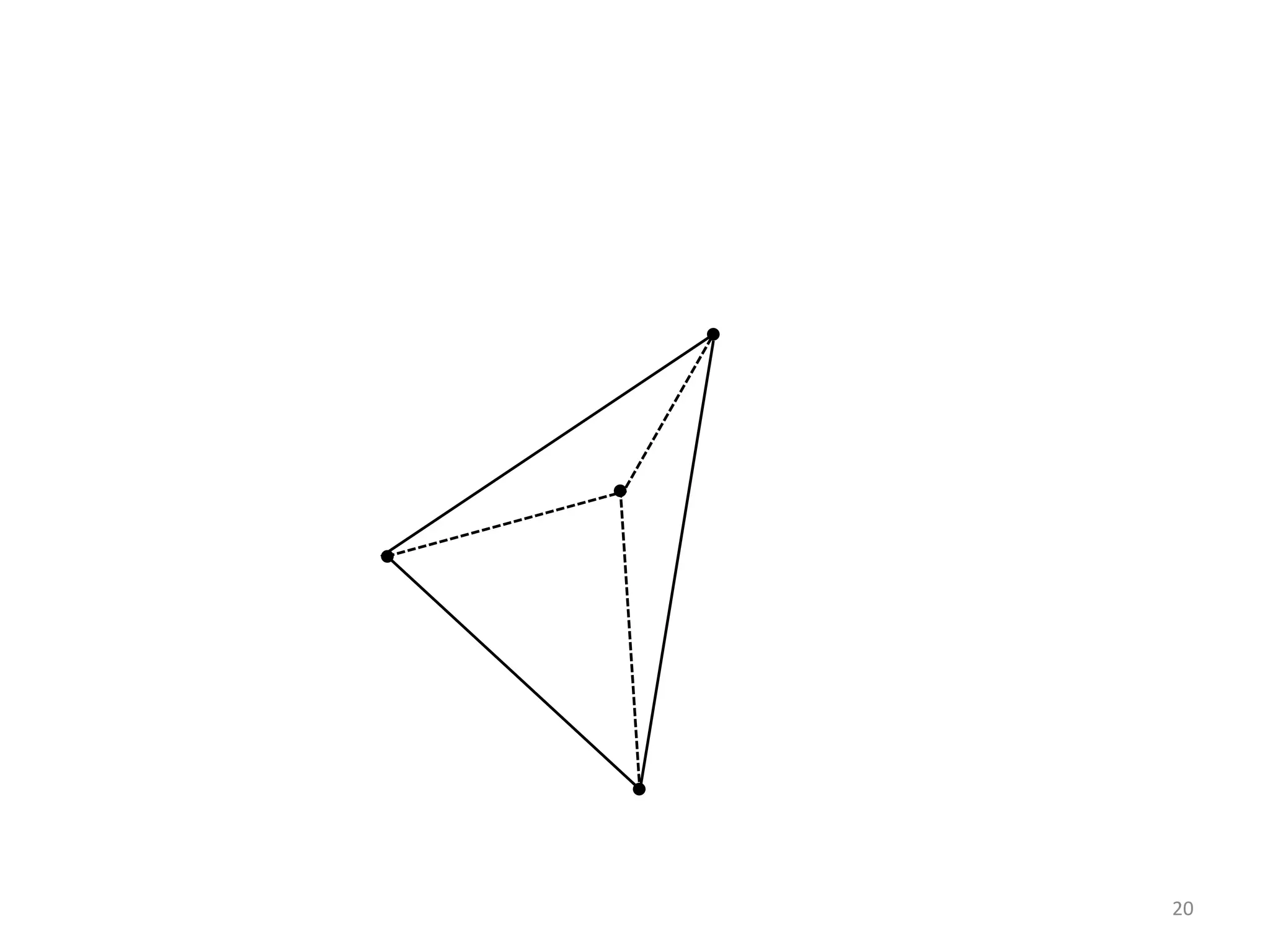
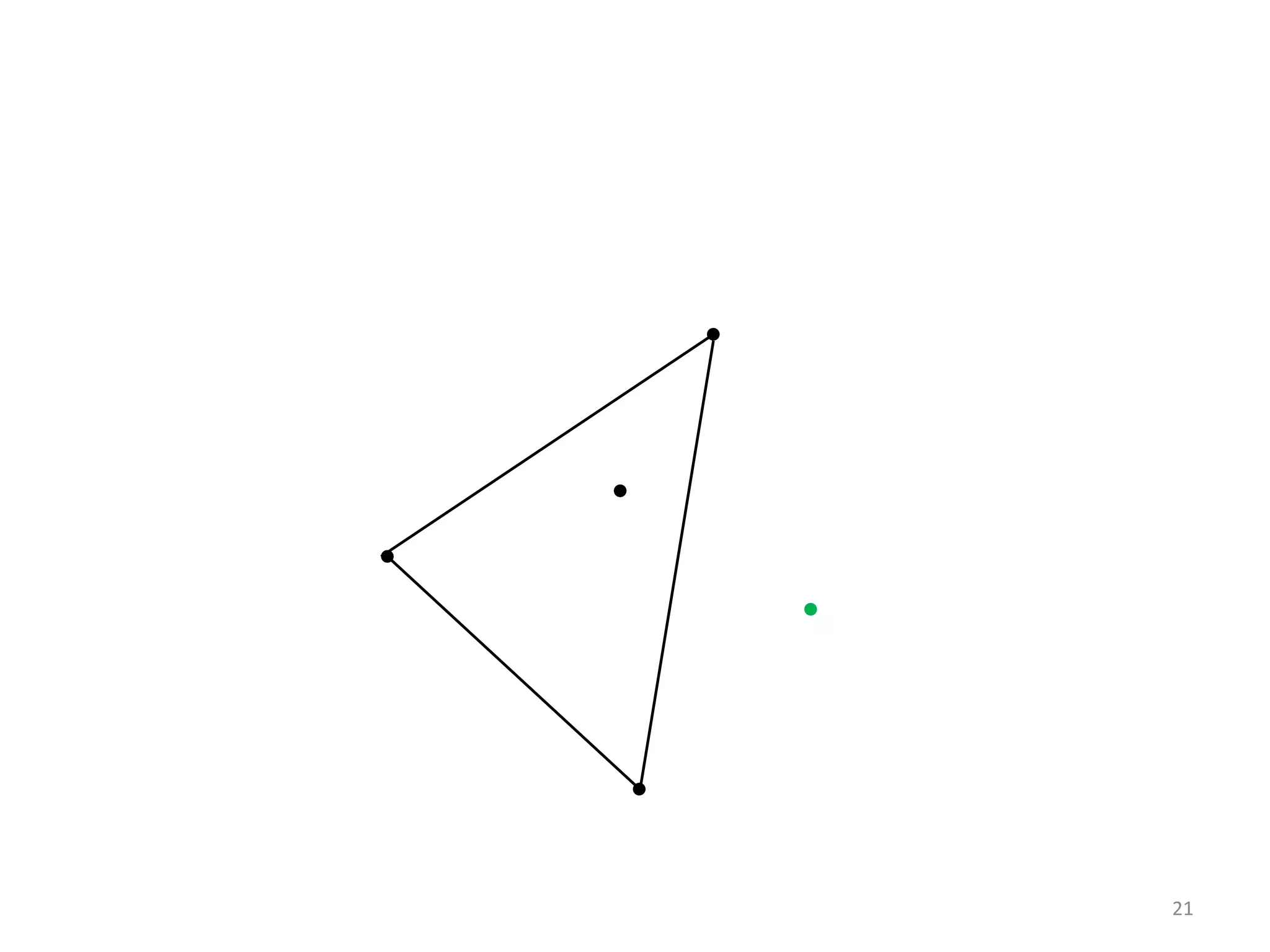
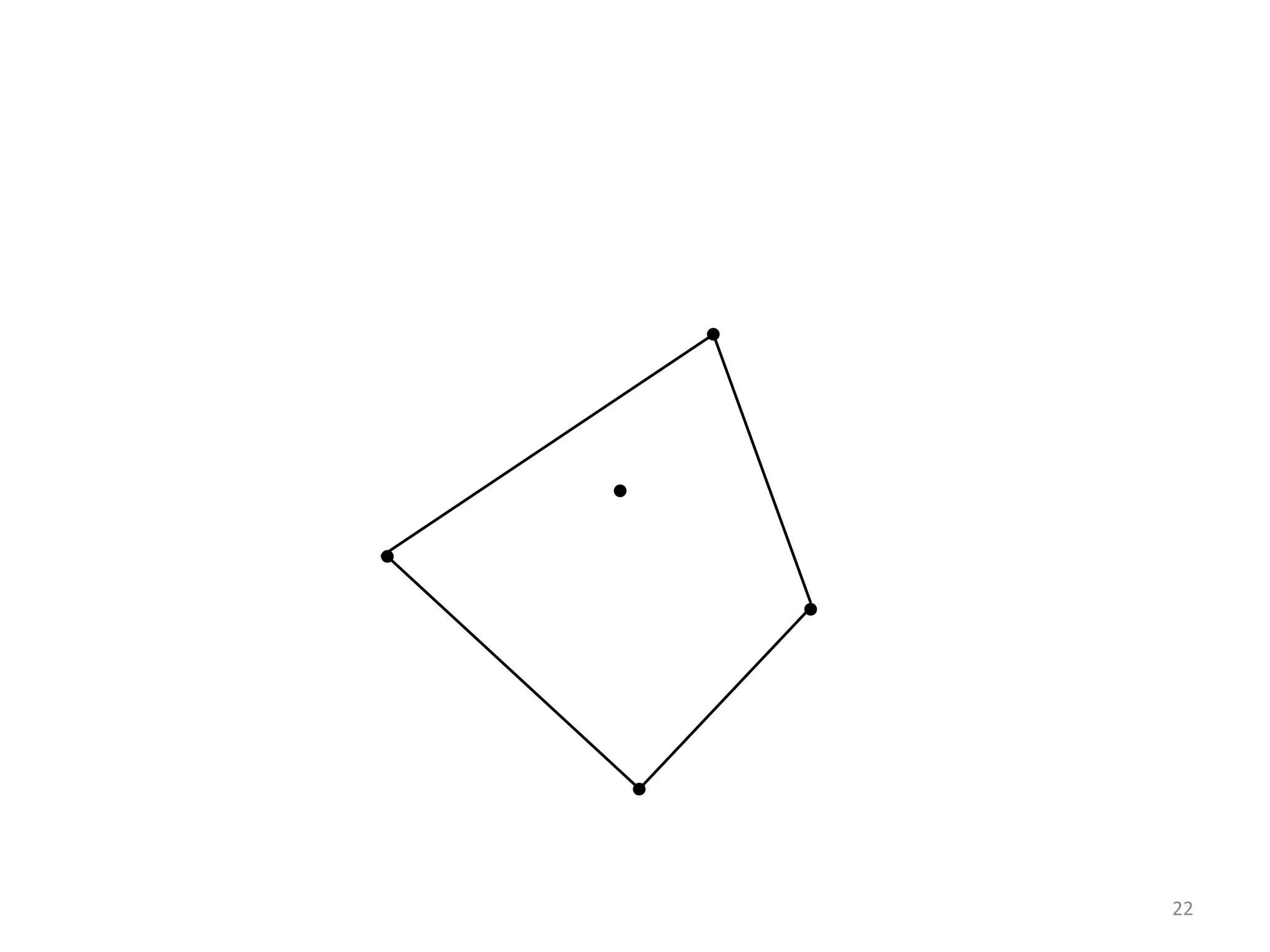
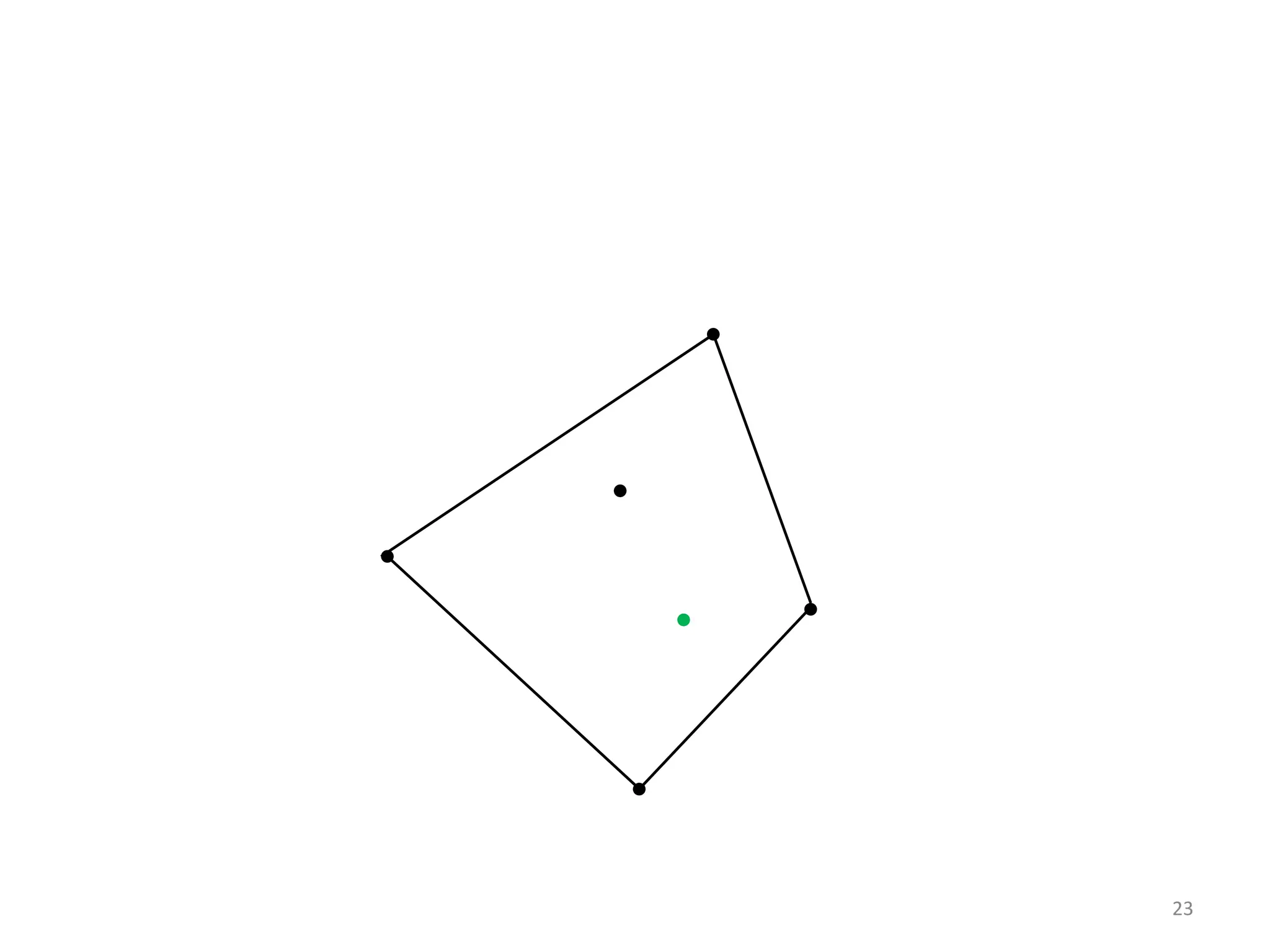
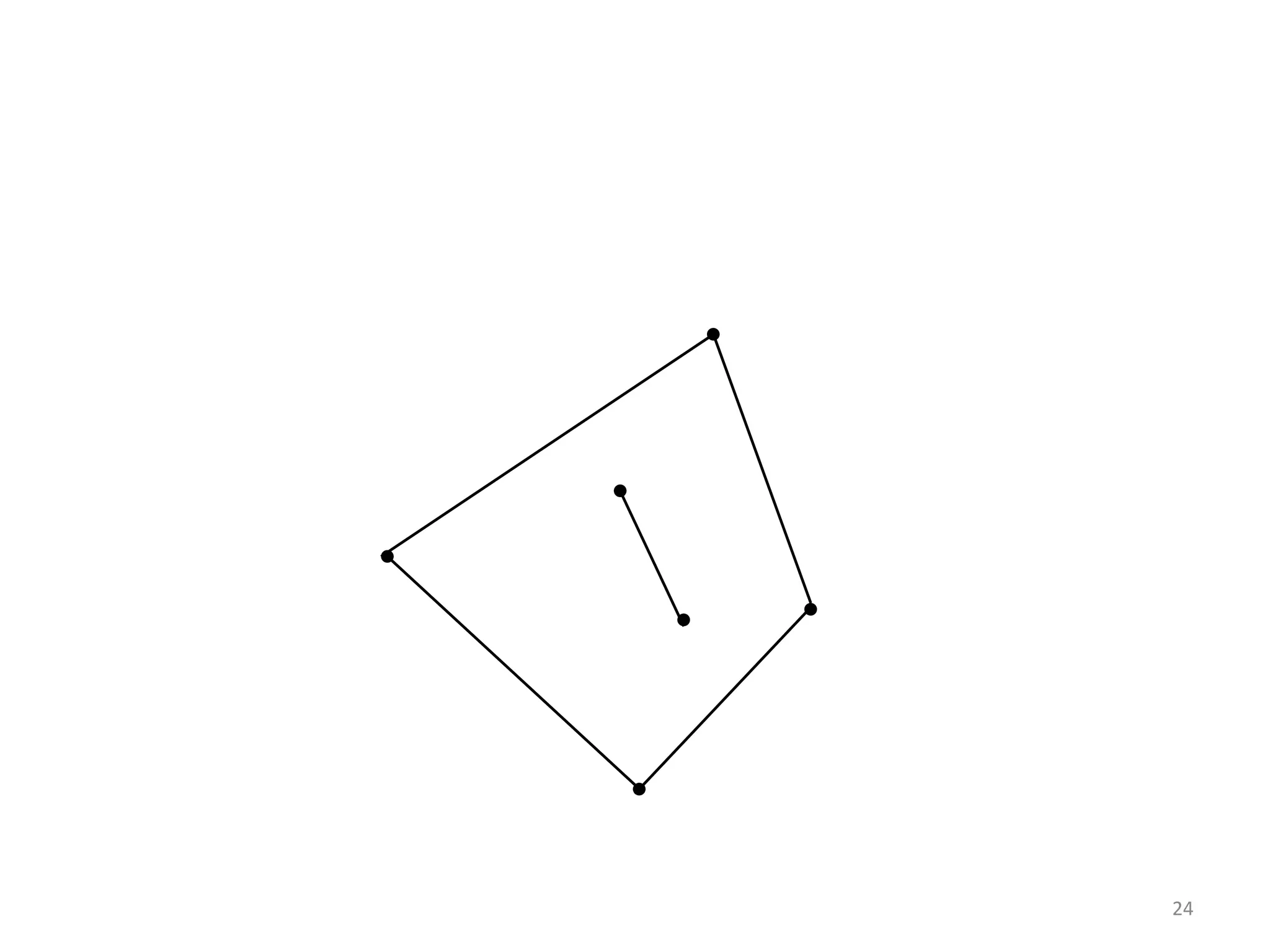
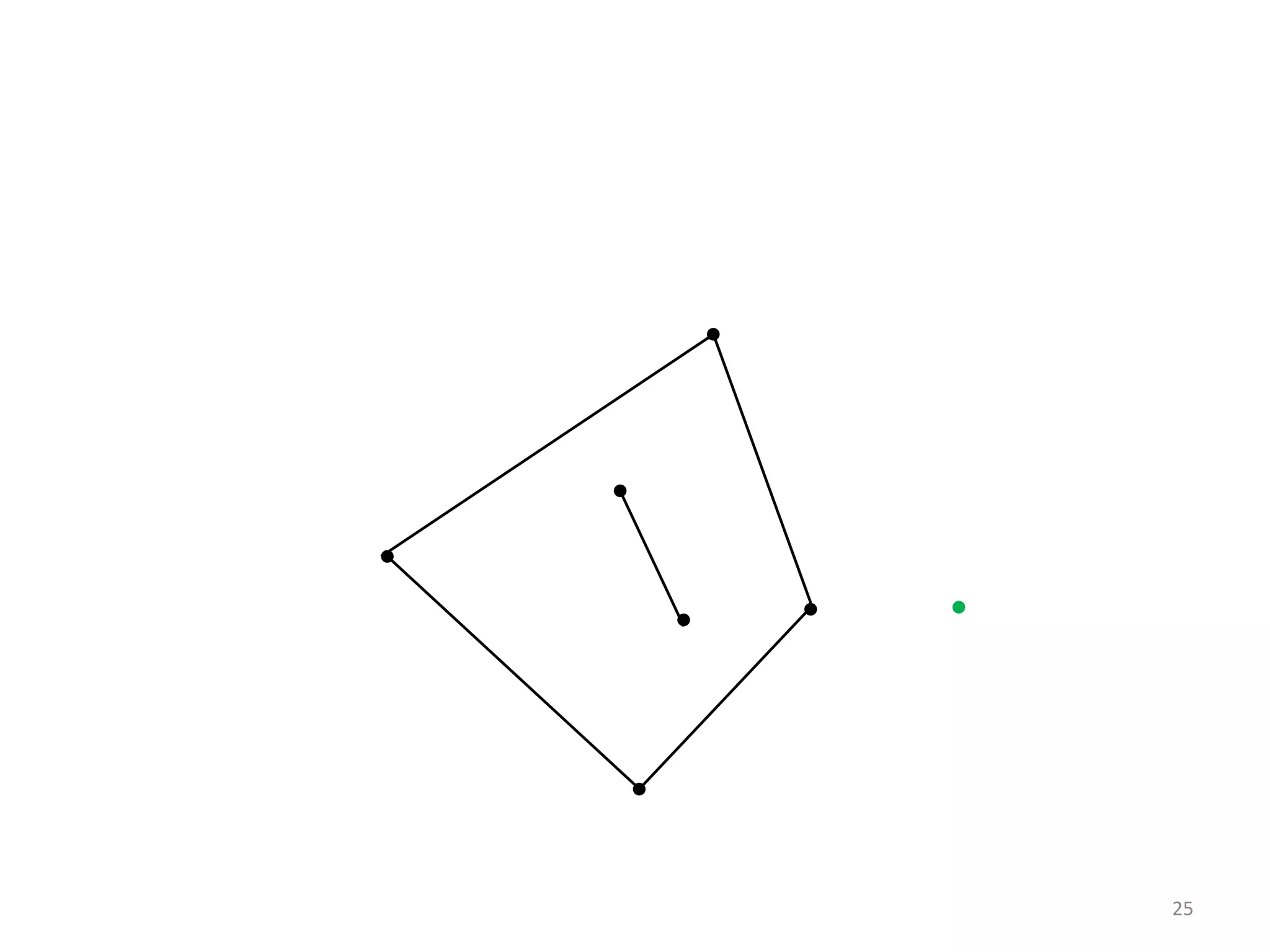
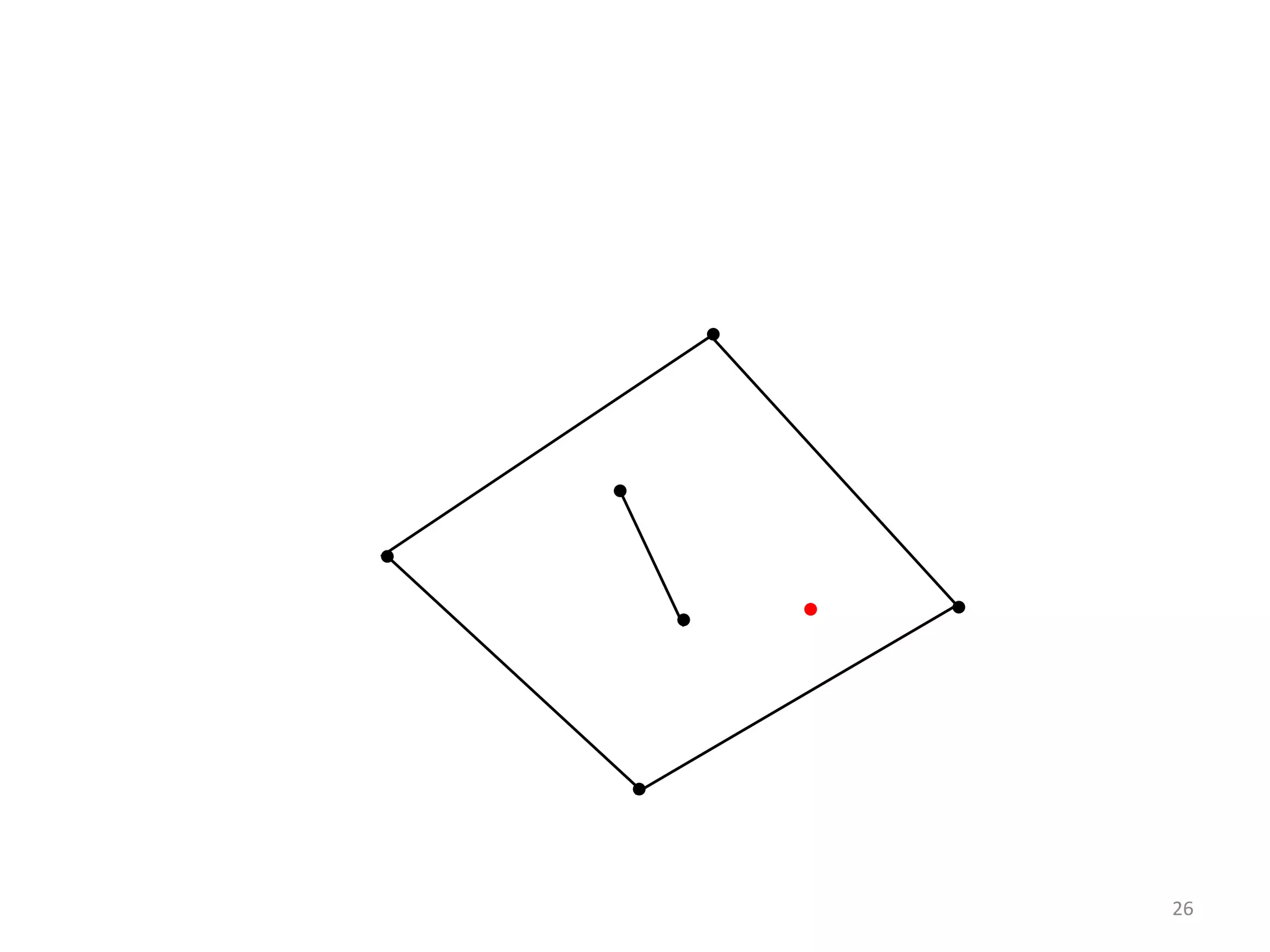
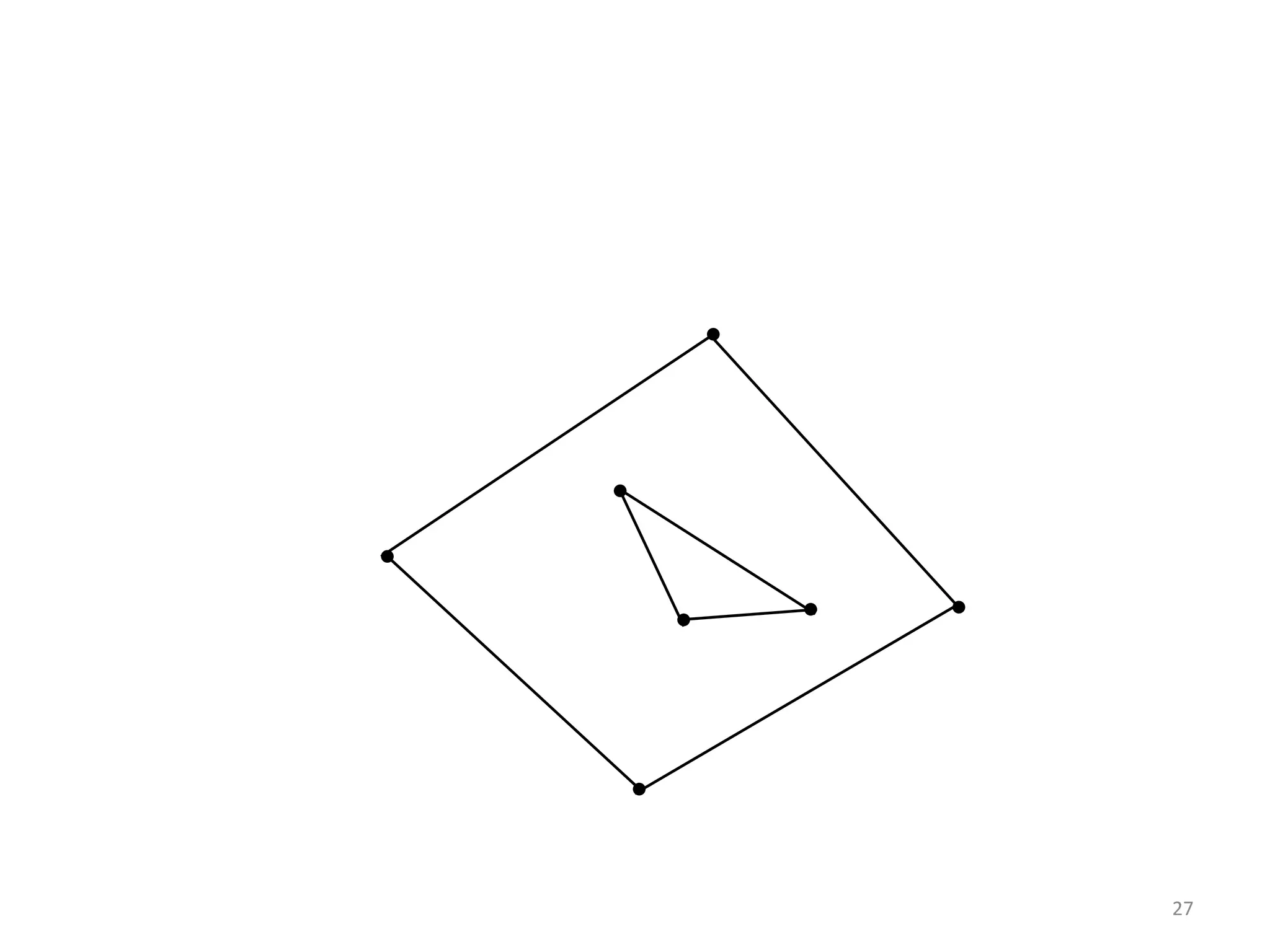
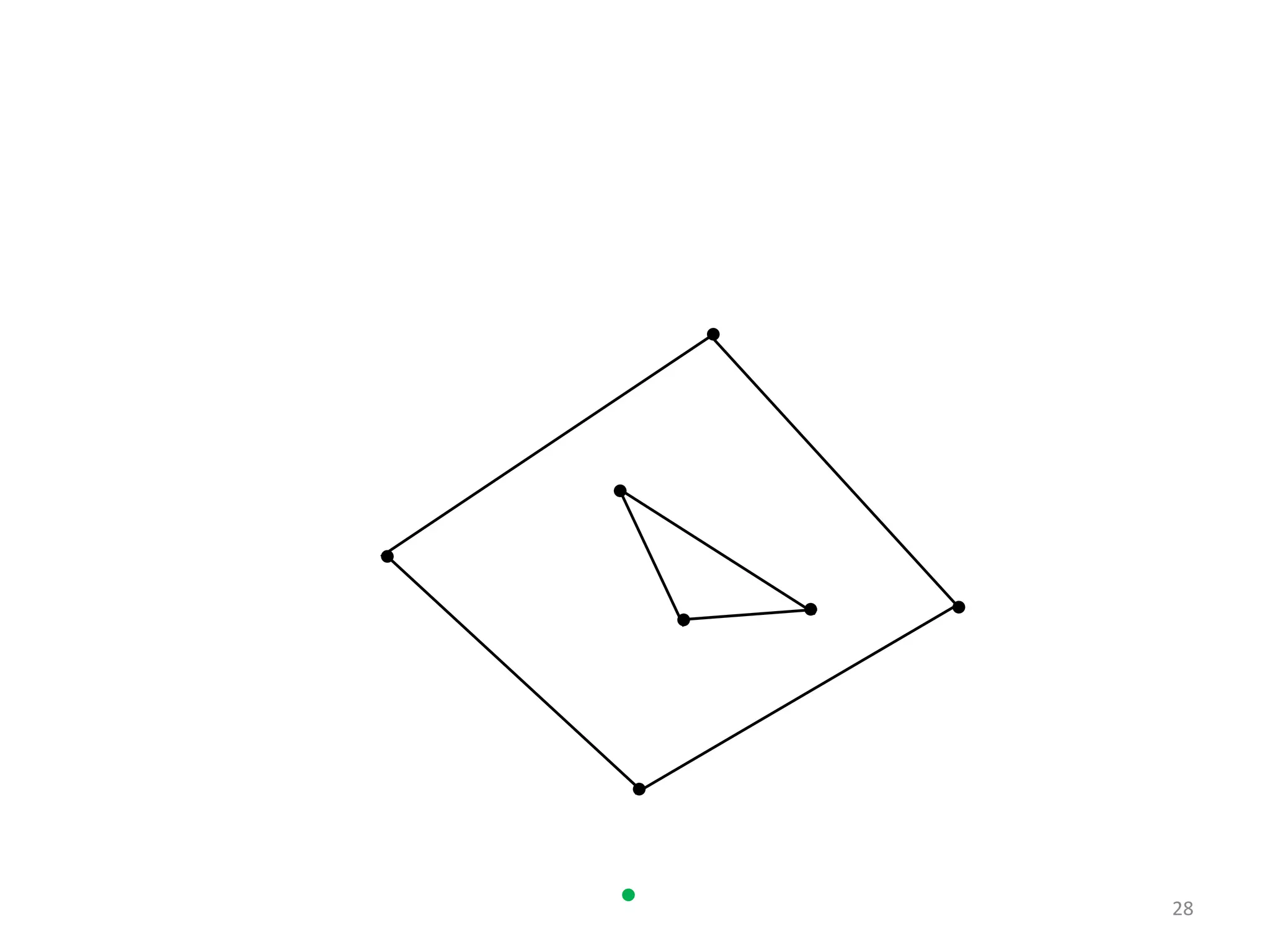
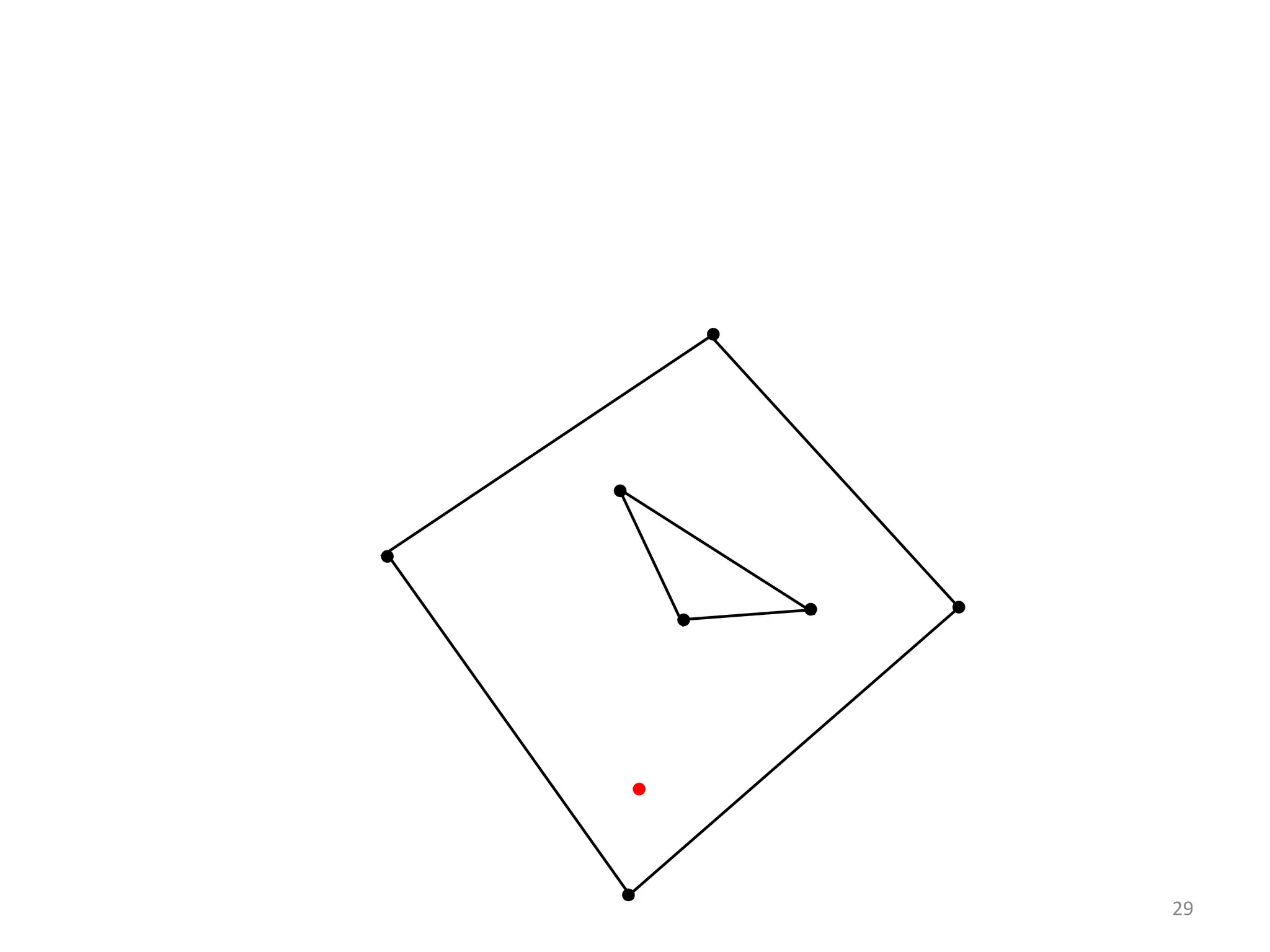
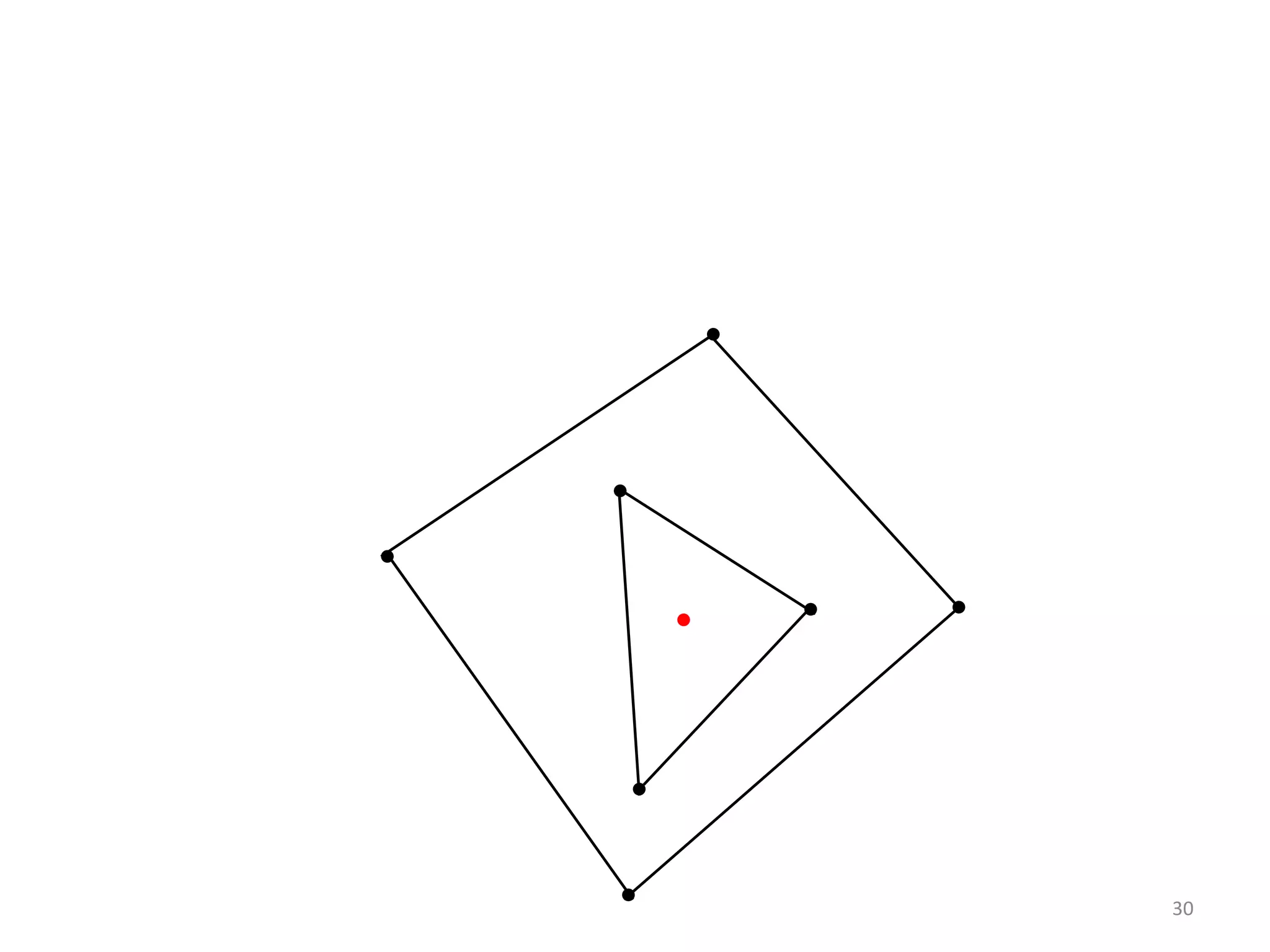
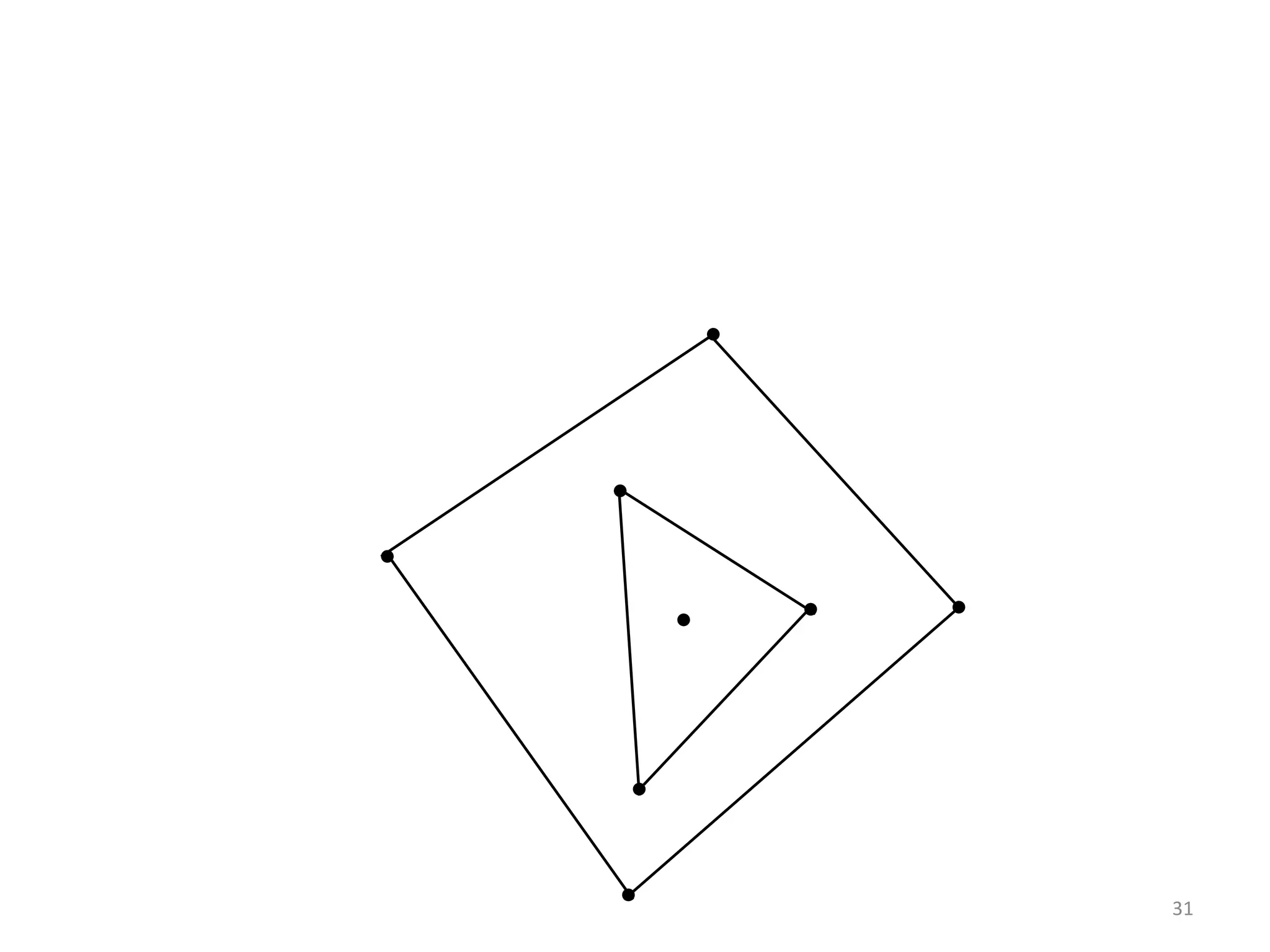
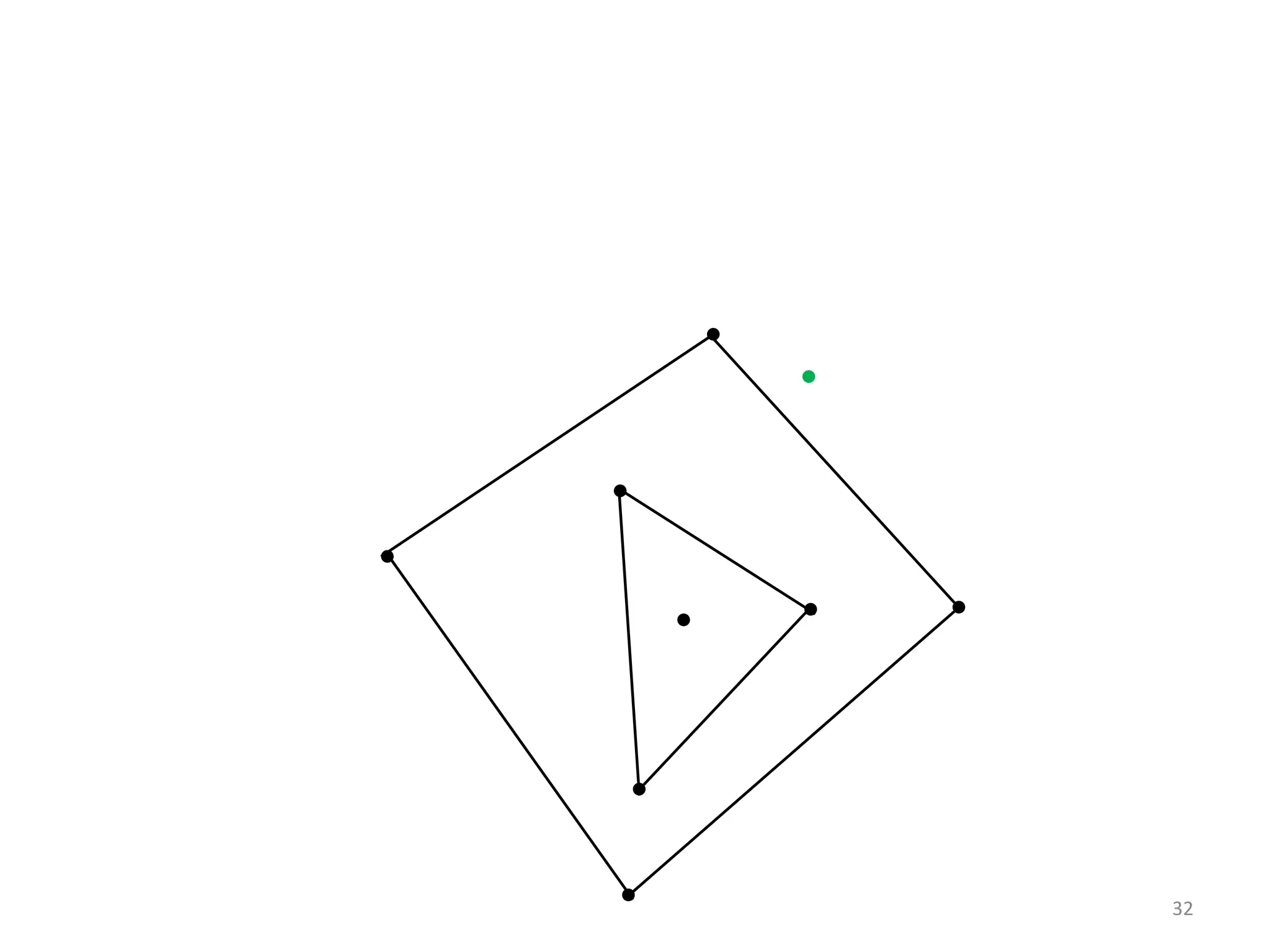
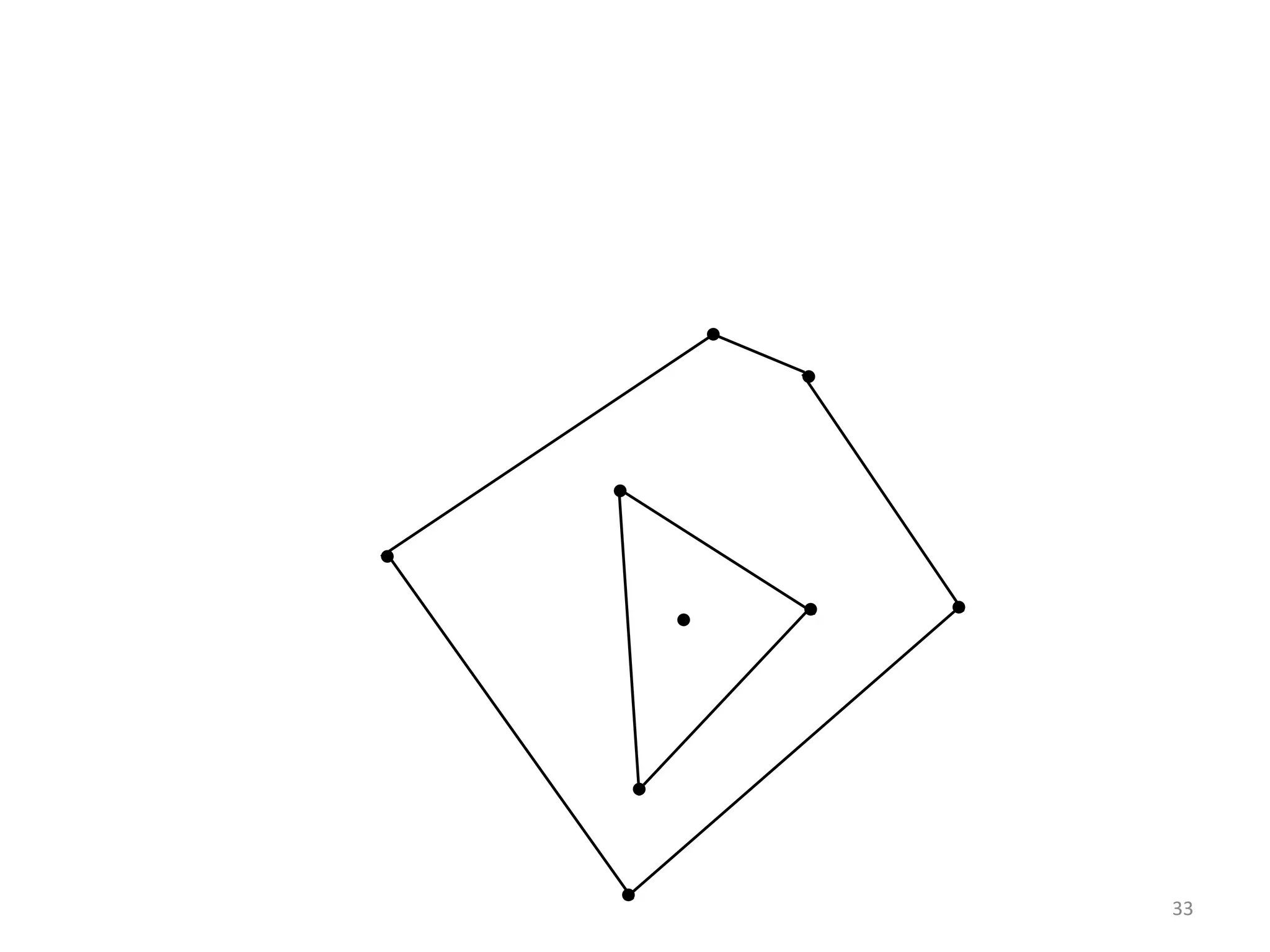
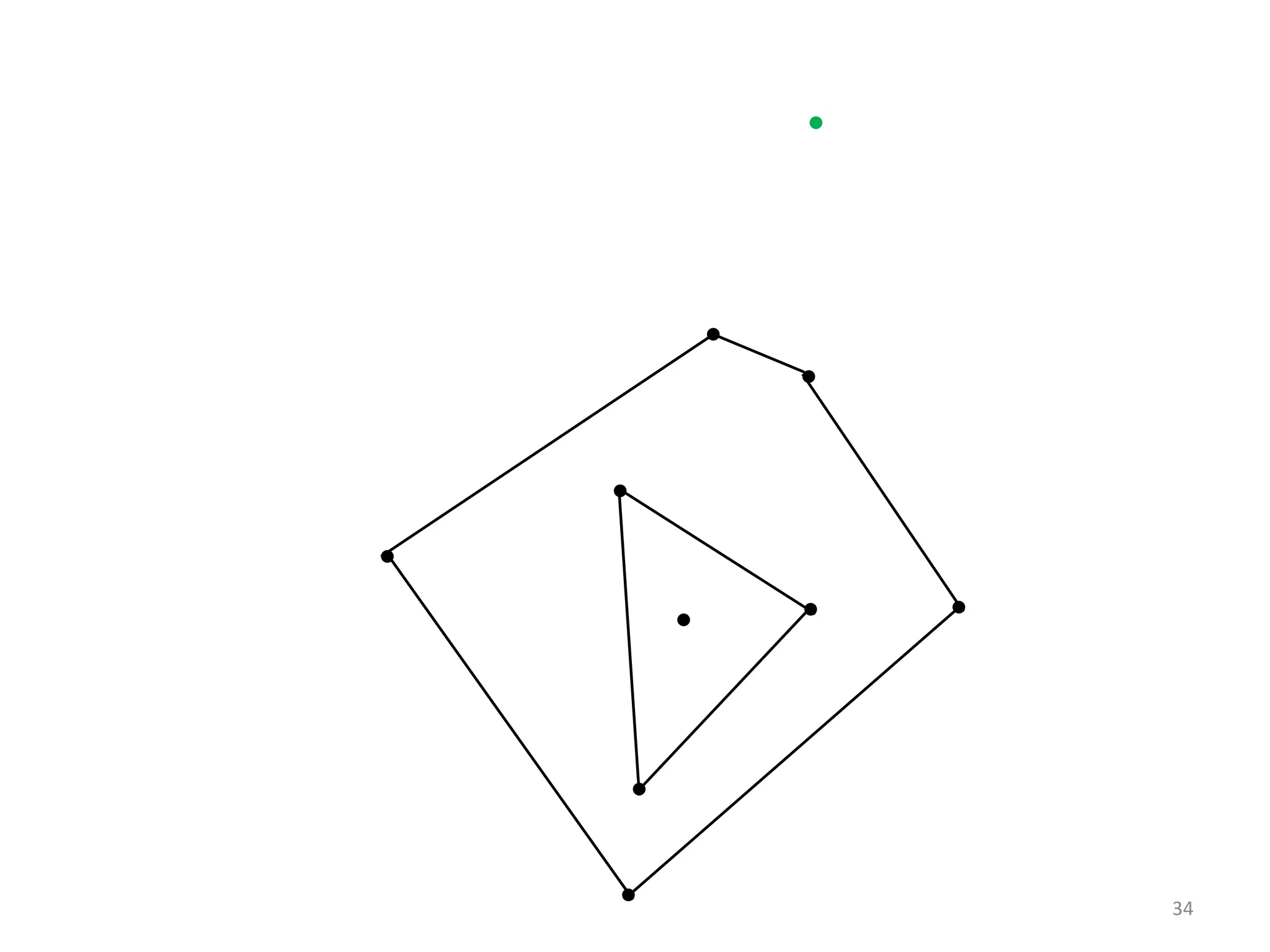
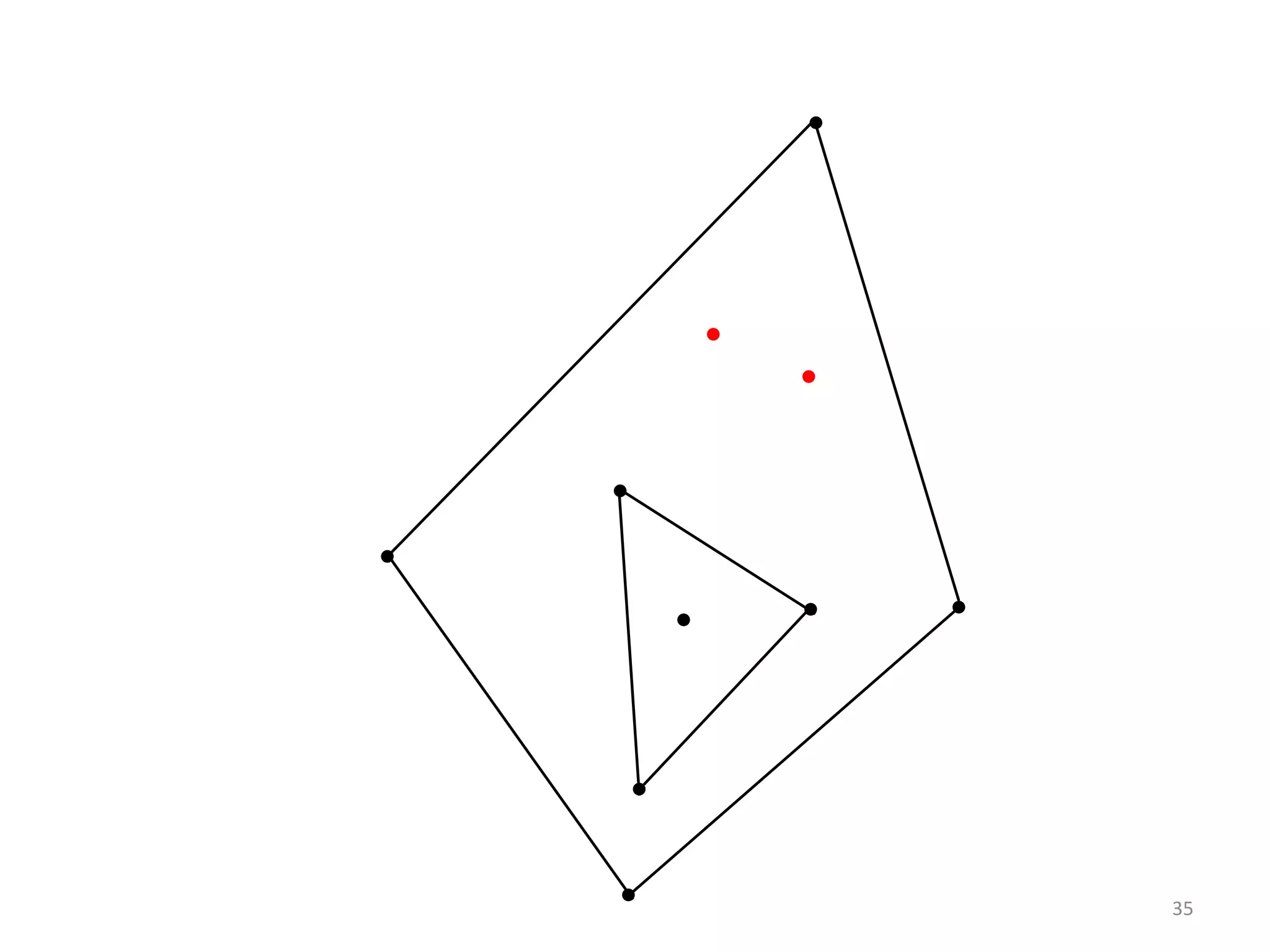
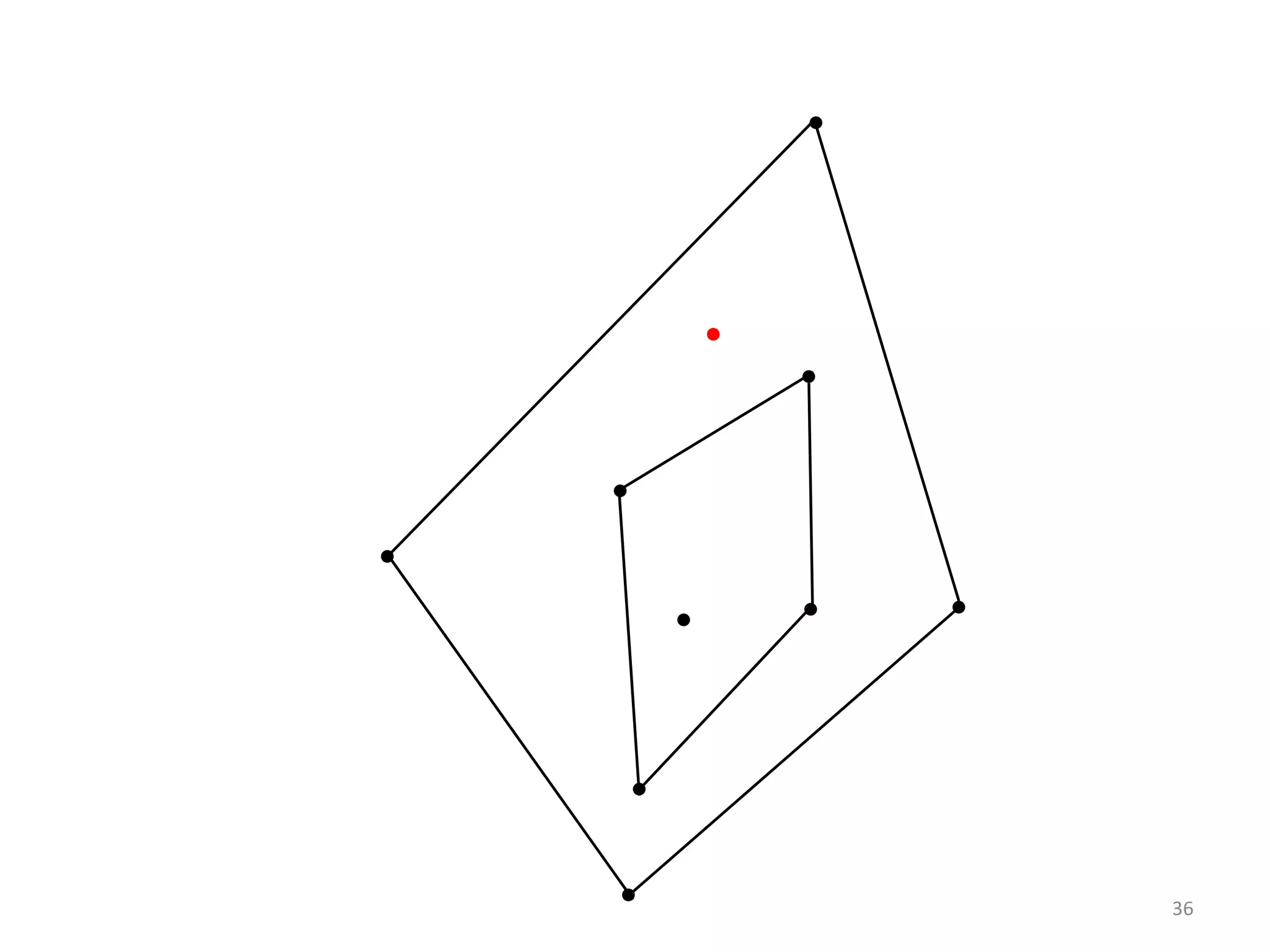
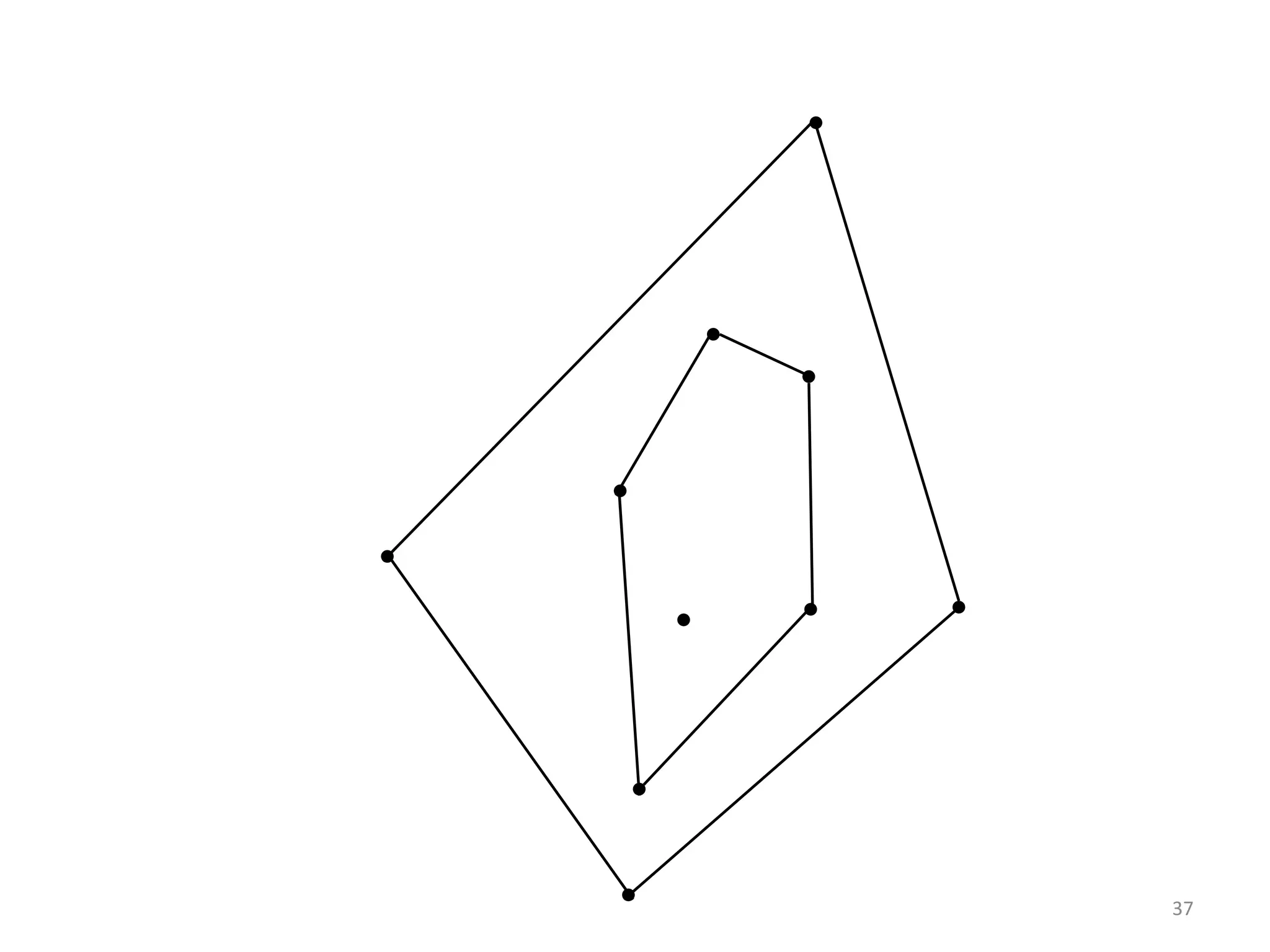

This document outlines a methodology for maintaining the convex layers of a dynamic set of points on a plane. It begins with an introduction to convex hulls and convex layers of static point sets. The research problem of updating convex layers when points are inserted or deleted from the set is presented. Existing algorithms for static and dynamic convex layers are reviewed. The author's own algorithm is then described, which can handle coincident and collinear points. It runs in O(n^3/k^2) time for updates, compared to O(n^2) for an existing approach. The algorithm was implemented and can extend to higher dimensions. It provides an improvement over previous work for dynamic convex layers maintenance.



![[Question Paper] Computer Graphics (Revised Course) [June / 2016]](https://cdn.slidesharecdn.com/ss_thumbnails/cg-qprevisedcoursejun-2016-170717110034-thumbnail.jpg?width=640&height=640&fit=bounds)


![Geographic Information System (May – 2016) [75:25 Pattern | Question Paper]](https://cdn.slidesharecdn.com/ss_thumbnails/gis-75-25-qp-may-2016-180428091913-thumbnail.jpg?width=640&height=640&fit=bounds)







![[Question Paper] Fundamentals of Digital Computing (Revised Course) [January ...](https://cdn.slidesharecdn.com/ss_thumbnails/fdc-qprevisedcoursejan-2014-170712141823-thumbnail.jpg?width=640&height=640&fit=bounds)





![Digital Signals and Systems (May – 2016) [Question Paper | IDOL: Revised Course]](https://cdn.slidesharecdn.com/ss_thumbnails/idol-dss-may-2016-180708053843-thumbnail.jpg?width=640&height=640&fit=bounds)




















![Assignment for Factory Method Design Pattern in C# [ANSWERS]](https://cdn.slidesharecdn.com/ss_thumbnails/assingment1answers-200420114633-thumbnail.jpg?width=640&height=640&fit=bounds)