Download as PDF, PPTX

![Introduction Complexity Gift wrapping Divide and conquer Incremental algorithm References
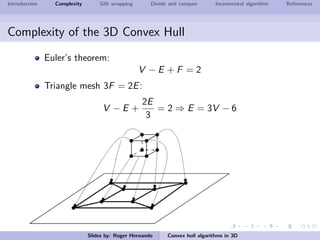
Complexity of the Convex Hull
Given a set S of n points in Rn what is maximum #edges on
CH(S)?
Bernard Chazelle [1990]: CH of n points in Rd in optimal
worst-case is O n log n + n
d
2 . Bound by Seidel[1981].
Slides by: Roger Hernando Convex hull algorithms in 3D](https://image.slidesharecdn.com/convexhulls3d-151209125134-lva1-app6891/85/Convex-hull-in-3D-6-320.jpg)
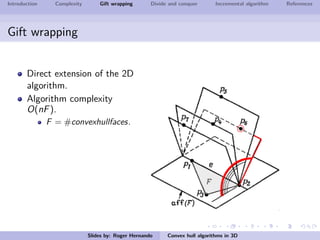
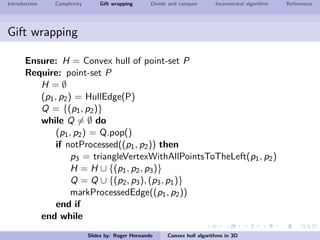
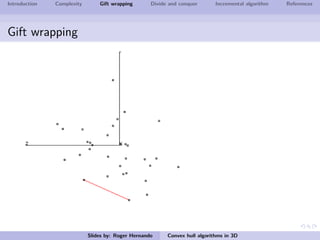
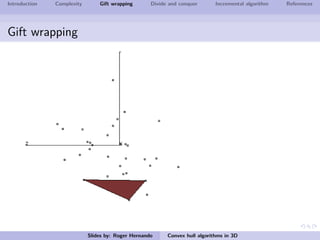
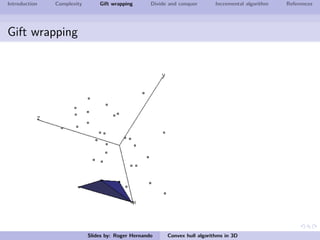

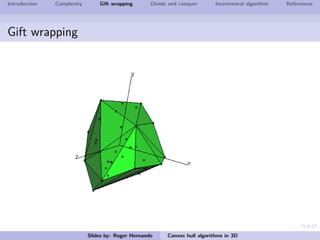
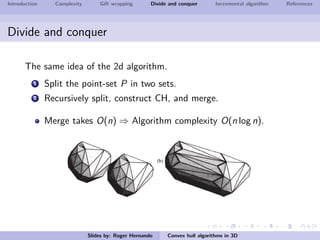
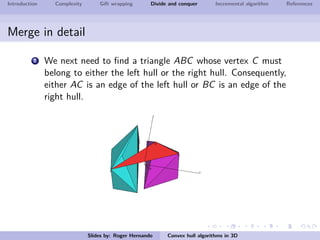
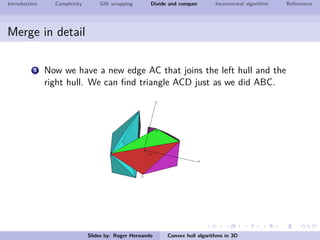
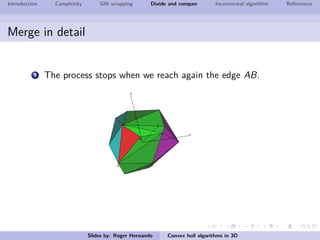
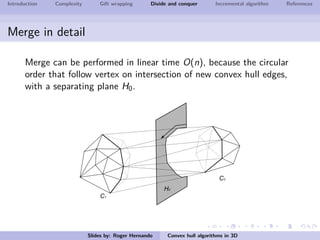
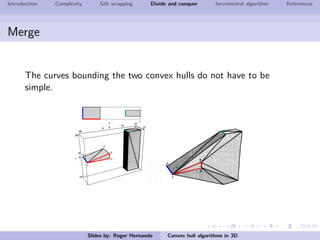
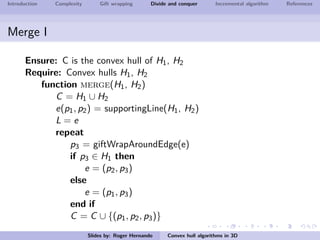
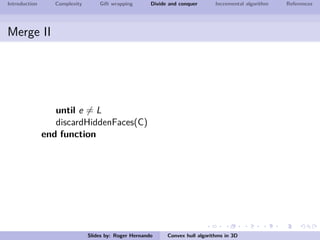
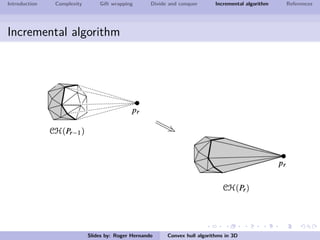
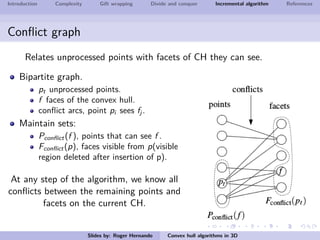
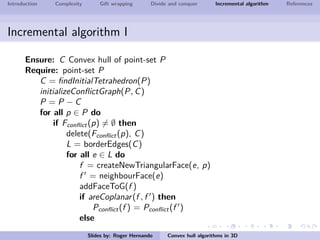
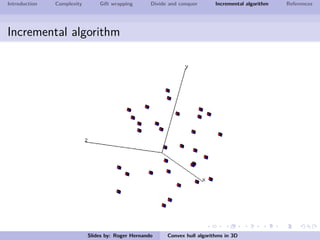
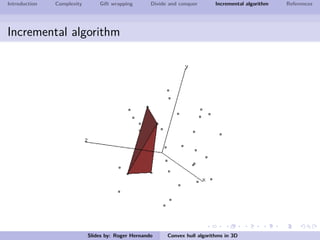
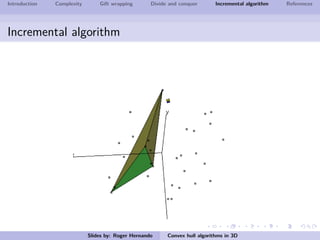

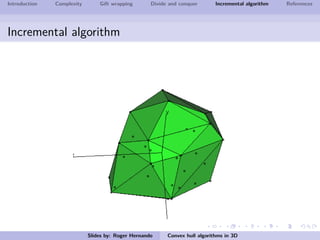

The document discusses several algorithms for computing the 3D convex hull of a set of points: gift wrapping, divide and conquer, and incremental. Gift wrapping directly extends the 2D algorithm and has complexity O(nF) where F is the number of faces. Divide and conquer recursively splits the point set into halves, computes the convex hulls, and merges them in O(n log n) time. The incremental algorithm maintains a conflict graph to efficiently find the visible faces from each new point in O(n log n) time.




































































![[Deck] What's New in Spark-Iceberg Integration via DSV2.pptx](https://cdn.slidesharecdn.com/ss_thumbnails/deckwhatsnewinspark-icebergintegrationviadsv2-260210005337-25955b12-thumbnail.jpg?width=640&height=640&fit=bounds)








