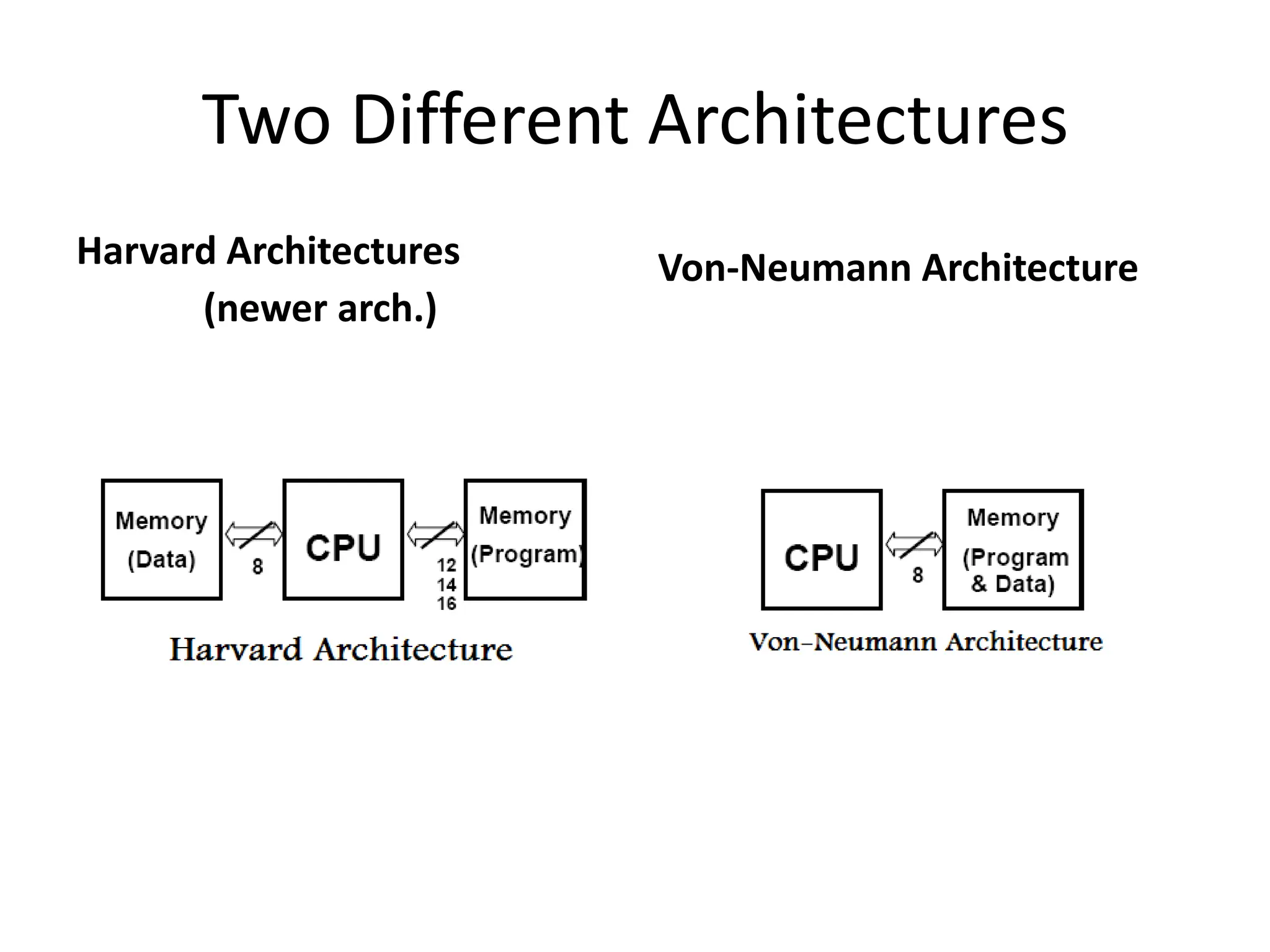
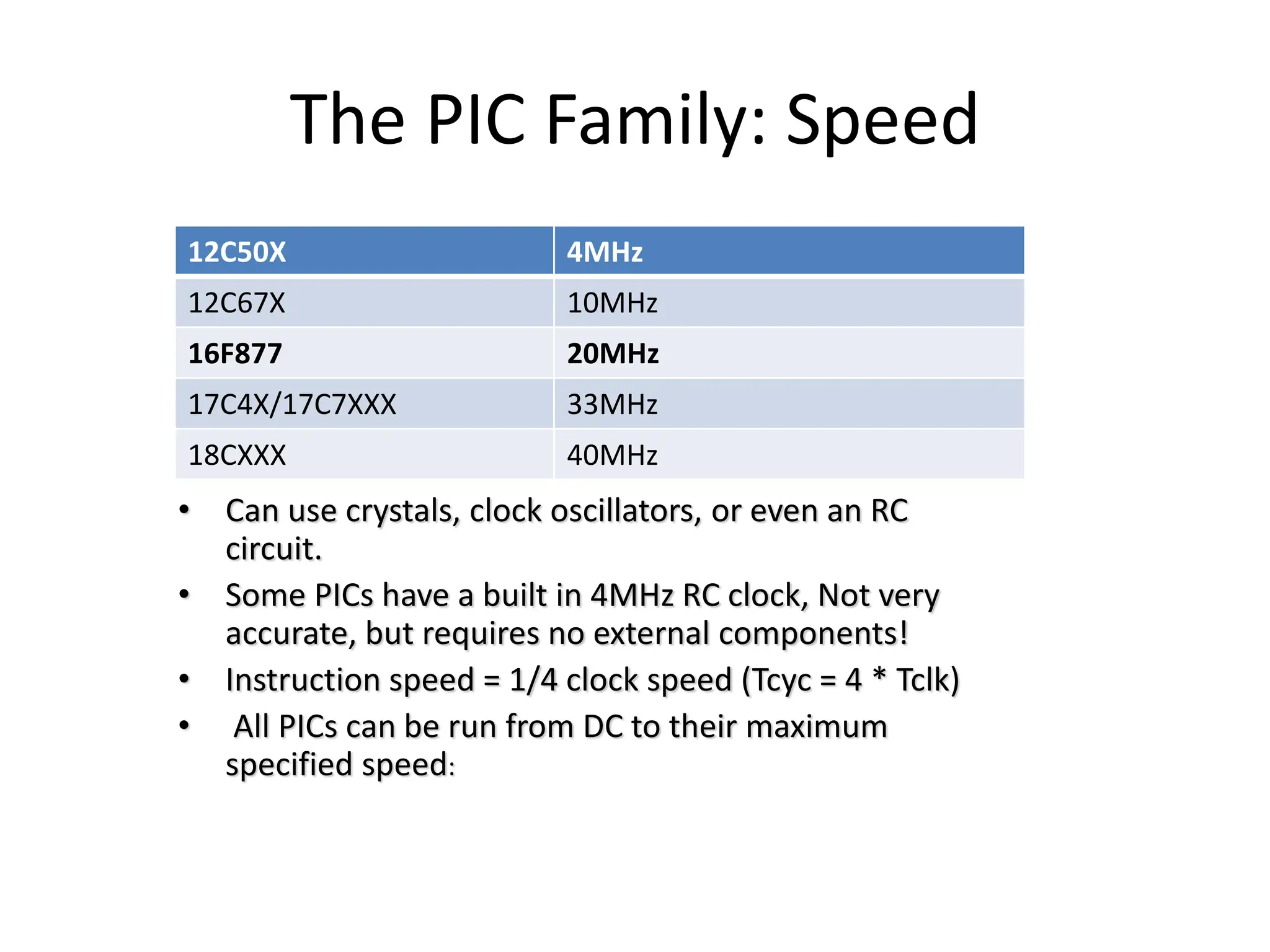
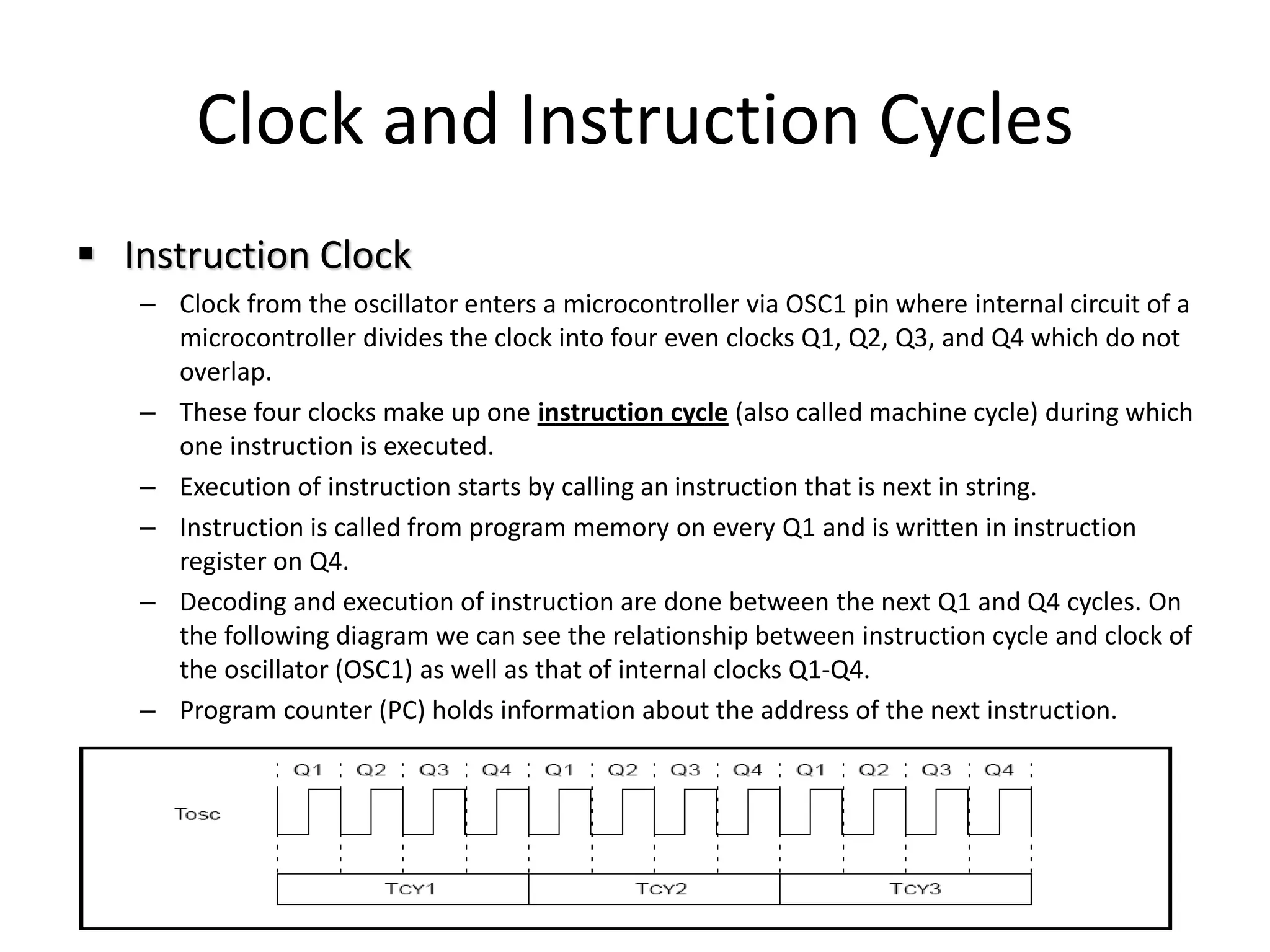
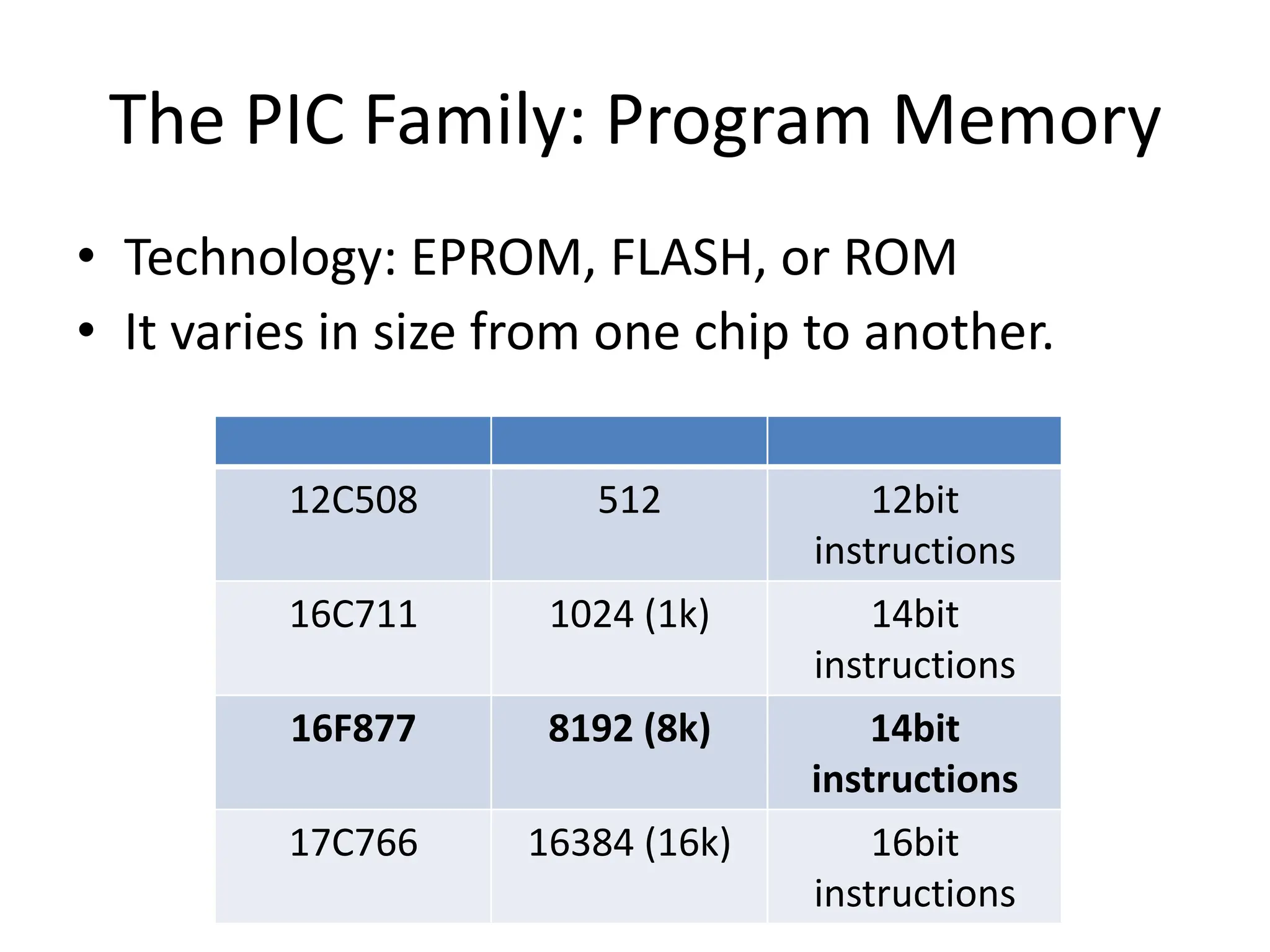
The document provides an overview of PIC microcontrollers, specifically the PIC16F877A model, detailing its architecture, classifications, features, and peripheral functions. It explains the differences between Harvard and Von-Neumann architectures, and describes the advantages of RISC and CISC designs. The document also covers the components, instruction cycle, program memory, and various peripherals integrated into the PIC microcontroller family.
























![Pic microcontroller [autosaved] [autosaved]](https://cdn.slidesharecdn.com/ss_thumbnails/picmicrocontrollerautosavedautosaved-120427093459-phpapp02-thumbnail.jpg?width=640&height=640&fit=bounds)






















