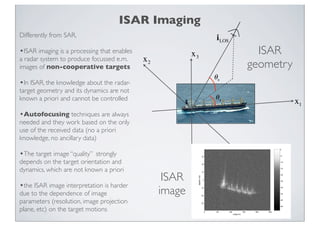
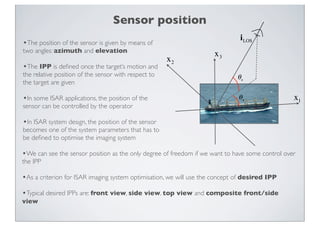
The document discusses optimal sensor positioning for ISAR imaging. It describes how the image projection plane (IPP) depends on the sensor position and target motion, and how obtaining certain desired IPPs like front, side or top views constrain the sensor position angles. It presents a signal model relating Doppler frequency to scatterer position and sensor angles. The constraints for different desired IPPs and for minimizing cross-range resolution are described. Numerical results map target motion distributions to optimal sensor position distributions based on measured boat motion data.



![Signal model (1)
Tob=1.5 s
=
Ideal Scatterers
RADAR
•The cross-range image formation can be seen as a Doppler analysis
•Scatterers in different position along the cross-range direction produce different Doppler and
therefore are mapped in different cross-range positions in the image
•The Doppler induced by a scatterer positioned at x can be calculated analytically
2
fd (t) = [Ωef f (t) × x]
λ](https://image.slidesharecdn.com/optimalsensor-100730202215-phpapp02/85/FR4-L09-OPTIMAL-SENSOR-POSITIONING-FOR-ISAR-IMAGING-7-320.jpg)
![Signal model (2)
•The Doppler frequency can also be calculated by using a matrix notation
2 2 T
fd (t) = [Ωef f (t) × x] = Ω (t) Lx
λ λ
Scatterer’s position
Effective rotation vector Rotation vector
Sensor position
related matrix
•where L is a 3x3 matrix with elements equal to
L11 = L22 = L33 = 0
L12 = −L21 = sin θe
L31 = −L13 = cos θe sin θa
L23 = −L32 = cos θa cos θe
•The Doppler frequency can therefore be rewritten as the sum of three contributions
fd (t) = L1 (t) x1 + L2 (t) x2 + L3 (t) x3
where Li ( t ) i = 1, 2, 3 are the Doppler Generating Factors (DGF)
L1 (t) = Ω2 (t) L21 + Ω3 (t) L31
L2 (t) = Ω1 (t) L12 + Ω3 (t) L32
L3 (t) = Ω1 (t) L13 + Ω2 (t) L23](https://image.slidesharecdn.com/optimalsensor-100730202215-phpapp02/85/FR4-L09-OPTIMAL-SENSOR-POSITIONING-FOR-ISAR-IMAGING-8-320.jpg)