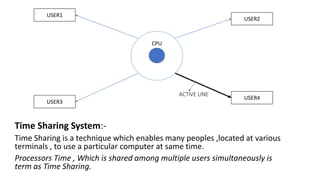
The document discusses real-time operating systems (RTOSes). It defines an RTOS as an operating system intended for applications that process data as it comes in without buffer delays. Examples provided of applications that use RTOSes include embedded systems, industrial robots, and scientific research equipment. The document outlines two basic RTOS designs: event-driven systems that switch tasks only when higher priority events need service, and time-sharing systems that switch tasks on a clock interrupt. Real-life examples of RTOSes mentioned include Windows CE, QNX, RT Linux, VxWorks, and Tron.


















![Operating systems1[1]](https://cdn.slidesharecdn.com/ss_thumbnails/operatingsystems11-130921090125-phpapp01-thumbnail.jpg?width=640&height=640&fit=bounds)