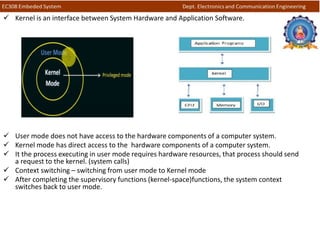
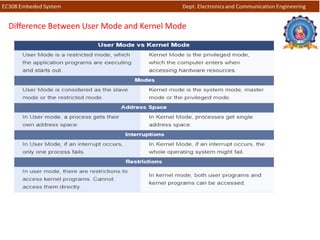
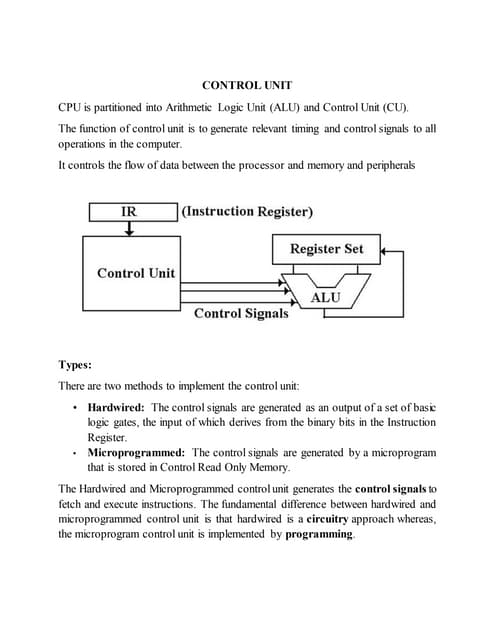
The document discusses the differences between user mode and kernel mode in operating systems. It explains that processors run in two modes: user mode which has restricted access, and kernel mode which has full access to hardware. When a process requires hardware resources, it makes a system call that switches the processor to kernel mode. After the kernel completes the task, it switches back to user mode. The key difference is that user mode processes are isolated from the system for security, while kernel mode has direct control over hardware. Real-time operating systems are also discussed, which must guarantee response times, unlike non-real-time systems which are non-deterministic.












































![RTOS [Autosaved].pptx](https://cdn.slidesharecdn.com/ss_thumbnails/rtosautosaved-230324171425-3bb3b10a-thumbnail.jpg?width=640&height=640&fit=bounds)






















