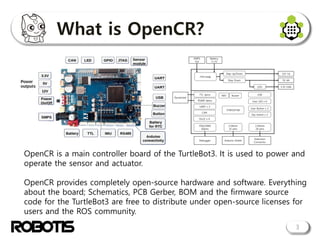
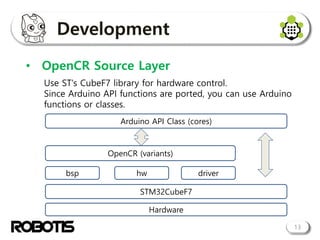
- OpenCR is a main controller board for TurtleBot3 that provides an open-source hardware and software platform for powering and operating sensors and actuators.
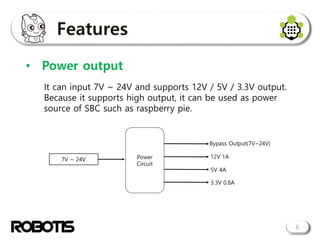
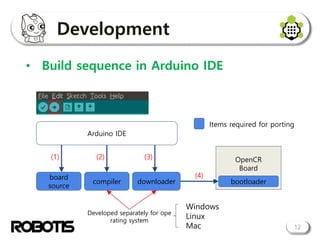
- It uses a high-performance STM32F746 microcontroller and supports Arduino IDE development. It has interfaces for communicating with Dynamixel motors, IMU sensors, and providing power output.
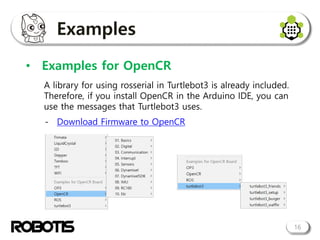
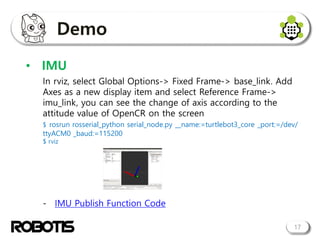
- The rosserial package converts ROS messages to a serial format for communication between OpenCR and ROS via USB. Examples are provided to demonstrate publishing IMU data and controlling TurtleBot3 using OpenCR and ROS.



























































![[드론] 펌웨어 분석 [2015.5.23]](https://cdn.slidesharecdn.com/ss_thumbnails/v2-150524160009-lva1-app6891-thumbnail.jpg?width=640&height=640&fit=bounds)


























