The document provides an overview of learning objectives and topics for an introduction to Arduino lecture, including:
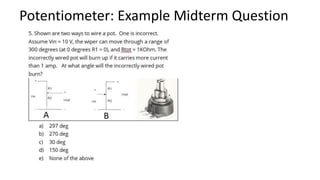
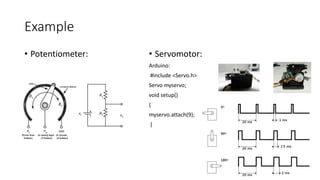
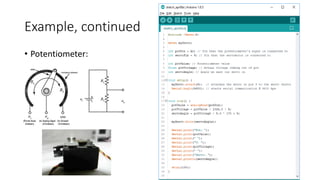
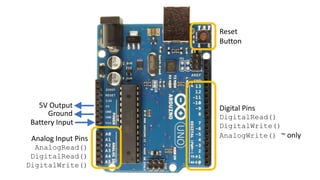
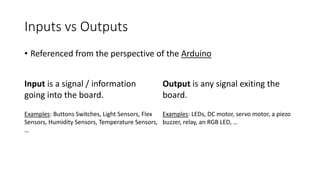
- How to use a potentiometer as a sensor and identify input/output ports of an Arduino.
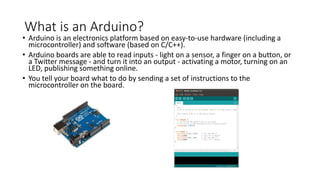
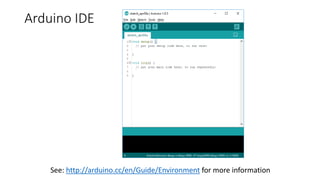
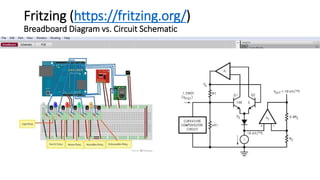
- What an Arduino is, its boards and IDE software.
- Why Arduinos are popular for electronics projects.
- How Arduinos will be used in labs, including acquiring sensor data and sending signals to systems using code.


































![[DSC Europe 25] Borko Kozomora - Optimizing business workflows with advances ...](https://cdn.slidesharecdn.com/ss_thumbnails/hbgekyb0txw0xpo4yfml-borko-kozomora-leading-ai-transformation-260122103838-cc29ee38-thumbnail.jpg?width=640&height=640&fit=bounds)













