INTERNSHIP PROGRAMME TITLE
EMBEDDEDSYSTEM
Under skillDzire for 2 Months.Organized by skillDzire in collaboration with
Andhra Pradesh State Council of Higher Education(APSCHE)
MIRACLE EDUCATIONAL SOCIETY GROUP OF INSTITUTION
(AUTONOMOUS)
Approved by AICTE, Accredited by NAAC&permanently Afflicated by JNTU-GV
VIZIANAGARAM-535216
DEPARTMENT OF ELECTRONICS AND COMMUNICATION ENGINEERING
SUBMITTED BY
B.Vyshnavi
3.
INTRODUCTION
An embeddedsystem is a small computer
that forms part of a larger system, device or
machine.
Its purpose is to control the device and to
allow a user to interact with it.
They tend to have one, or a limited number
of tasks that they can perform.
Examples of embedded systems include:
central heating systems.
4.
IMPORTANCE OF EMBEDDEDSYSTEM
The purpose of embedded systems is to control a specific function within a
device.
They are usually designed to only perform this function repeatedly, but
more developed embedded systems can control entire operating systems.
Some more complex embedded systems can also perform several
different functions, but these are still relatively simple tasks that do not
require a large amount of processing power
5.
ARDUINO UNO INEMBEDDED SYSTEM
LIST OF ARUDINO PROJECTS
Object Detection Sensor
Device operation using switches by Arduino
Device operation using PC by Arduino
Robot operation using switches by Arduino
ABSTRACT
The main aimof this project is to operate the ROBOT
using switches by Arduino.
What is an Arduino Uno used for?
Arduino UNO is a low-cost, flexible, and easy-to-use
programmable open-source microcontroller board that
can be integrated into a variety of electronic projects
This board can be interfaced with other Arduino boards,
Arduino shields, Raspberry Pi boards and can control
relays, LEDs and motors as an output.
Introduction to Robots
Robotics it is man-made mechanical devices that can move by
themselves, whose motion must be planned, sensed, actuated, modeled
and controlled, and whose motion behavior can be influenced by
programming. Robots are the physical agent that perform task by
manipulating the physical world.
Robots are the physical agent that perform task by manipulating the
physical world.
Robots hardware(components):
Robots depend on the function of the Sensors, Effectors, Actuators,
Controller and their designs that appropriate for the task.
They perform various tasks depending on these hardware components that
are given to them and programmed in them
12.
Soft code
int w1=2;int w2=3; int w3=4; int w4=5;
int ow1=6; int ow2=7; int ow3=8; int ow4=9;
int swt1=13; int swt2=12; int swt3=11; int swt4=10;
int swt1st=0; int swt2st=0; int swt3st=0; int swt4st=0;
void setup()
{
pinMode(swt1,INPUT); pinMode(swt2,INPUT); pinMode(swt3,INPUT);
pinMode(swt4,INPUT); pinMode(w1,OUTPUT); pinMode(w2,OUTPUT);
pinMode(w3,OUTPUT); pinMode(w4,OUTPUT); pinMode(ow1,OUTPUT);
pinMode(ow2,OUTPUT); pinMode(ow3,OUTPUT); pinMode(ow4,OUTPUT);
Serial.begin(9600); Serial.println("ROBOT OPERATION");
}
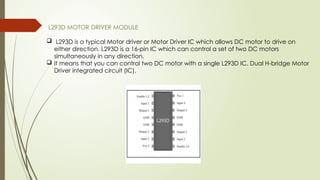
L293D MOTOR DRIVERMODULE
L293D is a typical Motor driver or Motor Driver IC which allows DC motor to drive on
either direction. L293D is a 16-pin IC which can control a set of two DC motors
simultaneously in any direction.
It means that you can control two DC motor with a single L293D IC. Dual H-bridge Motor
Driver integrated circuit (IC).
17.
CONCLUSION
By performing embeddedinternship. I have learned the topic of
MPMC,Embedded C,Arduino UNO, I have design and simulated the
Robot operation using switches by Arduino and verified the output
Arduino is a micro-controller. This small computer is used as the
brain of the robot. It can be programmed to control the way
buttons, motors, switches, lights, and other electronic parts work
together