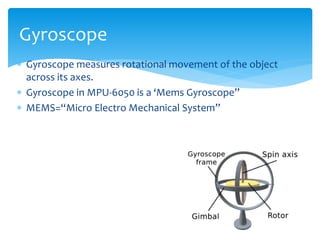
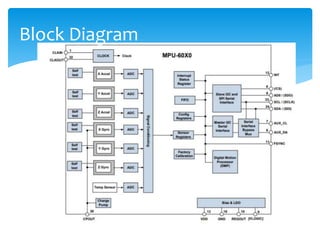
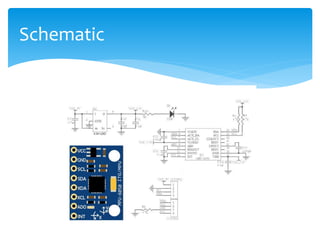
The document discusses the MPU6050 motion sensor. It contains a 3-axis gyroscope, 3-axis accelerometer, temperature sensor, and digital motion processor. The MPU6050 communicates via I2C and provides orientation and motion data to applications like robotics, drones, and aircraft.