Downloaded 25 times
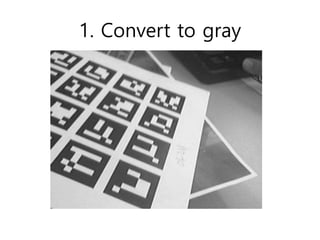
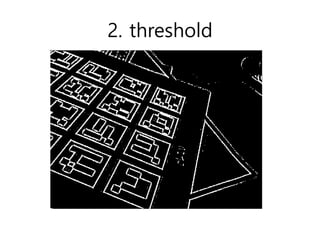
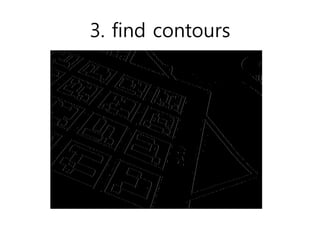
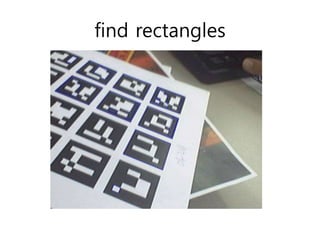

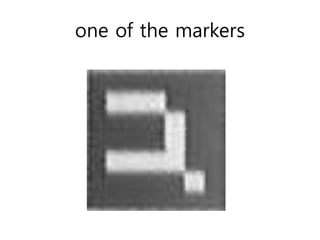
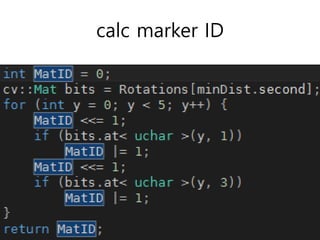
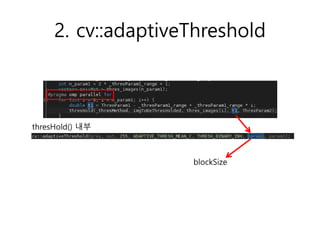
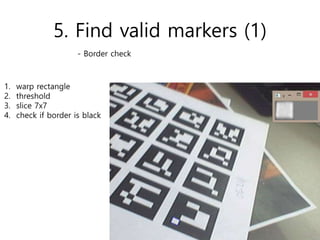
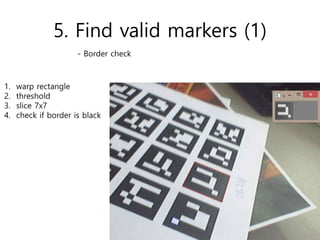
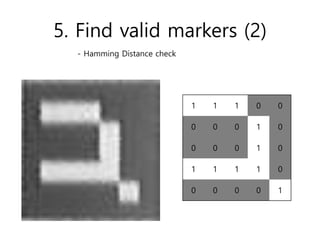
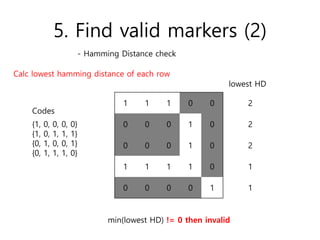
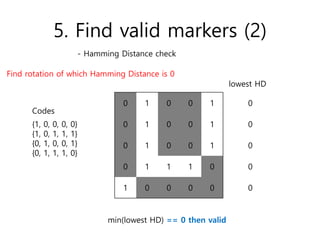
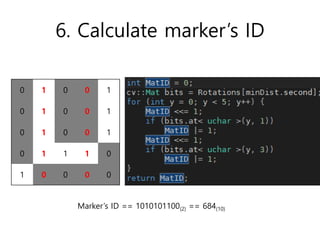
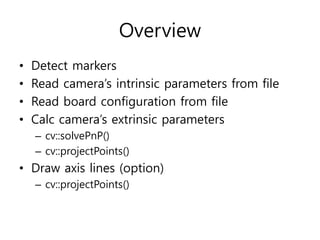
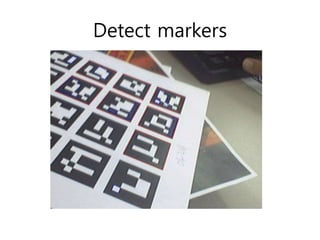
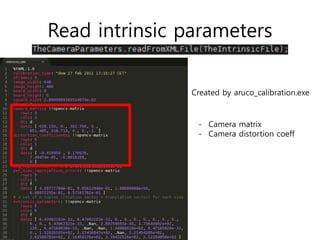
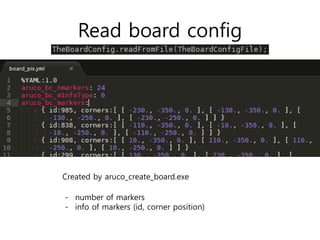
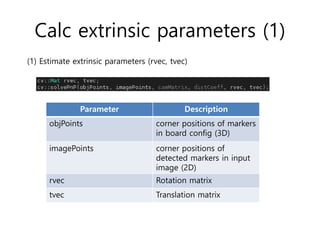
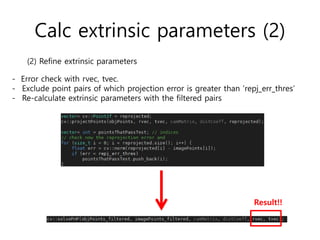
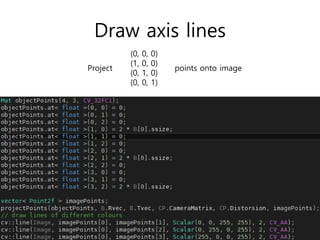
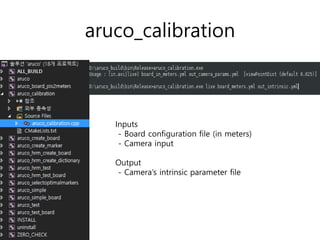
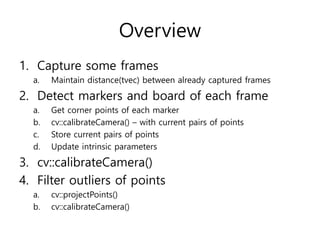
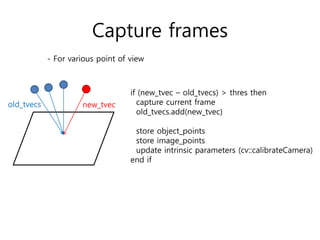
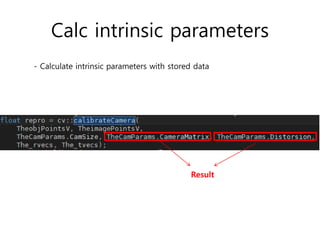
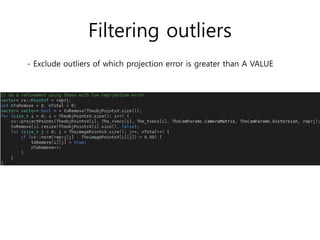
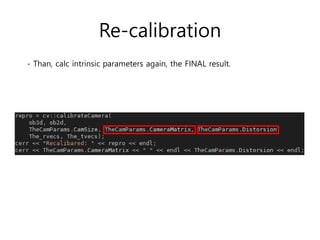

The document describes algorithms for marker detection, board detection, and camera calibration using Aruco. For marker detection, it involves converting to grayscale, thresholding, finding contours, filtering valid markers by checking border and calculating Hamming distance, and computing the marker ID. For board detection, it detects markers, reads intrinsic/board parameters, and calculates extrinsic parameters using solvePnP and projectPoints. For camera calibration, it captures frames with varying distance between, detects markers/board per frame, runs calibrateCamera to update intrinsics, filters outliers, and performs final calibration.



























![Computer Vision - Unit-II [Repaired].pptx](https://cdn.slidesharecdn.com/ss_thumbnails/computervision-unit-iirepaired-251223052721-8dd262a0-thumbnail.jpg?width=640&height=640&fit=bounds)