Downloaded 17 times



![It is observed that, in the actual structure, the deflections at joints B and C is
zero. Now the total deflections at B and C of the primary structure due to applied
external loading and redundants R1 and R2 is,
Δ 1 = (Δ L )1 + a11 R1 + a12 R2 (8.4a)
Δ 2 = (Δ L )2 + a 21 R1 + a 22 R2 (8.4b)
The equation (8.4a) represents the total displacement at B and is obtained by
superposition of three terms:
1) Deflection at B due to actual load acting on the statically determinate
structure,
2) Displacement at B due to the redundant reaction R1 acting in the positive
direction at B (point 1) and
3) Displacement at B due to the redundant reaction R2 acting in the positive
direction at C .
The second equation (8.4b) similarly represents the total deflection at C . From
the physics of the problem, the compatibility condition can be written as,
Δ 1 = (Δ L )1 + a11 R1 + a12 R2 = 0 (8.5a)
Δ 2 = (Δ L )2 + a 21 R1 + a 22 R2 = 0 (8.5b)
The equation (8.5a) and (8.5b) may be written in matrix notation as follows,
⎧ (Δ L )1 ⎫ ⎡ a11 a12 ⎤ ⎧ R1 ⎫ ⎧0⎫
⎨ ⎬+ ⎨ ⎬=⎨ ⎬
(Δ L )2 ⎭ ⎢a 21 a 22 ⎥ ⎩ R2 ⎭ ⎩0⎭
(8.6a)
⎩ ⎣ ⎦
{(Δ L )1 } + [A]{R} = {0} (8.6b)
In which,
⎧( Δ ) ⎫ ⎡a a12 ⎤ ⎧ R1 ⎫
{( Δ ) } = ⎪( Δ ) ⎪ ; [ A] = ⎢a
L 1 ⎨
L 1
⎬
11
⎥ and {R} = ⎨ R ⎬
⎪
⎩ L 2 ⎪
⎭ ⎣ 21 a22 ⎦ ⎩ 2⎭
Solving the above set of algebraic equations, one could obtain the values of
redundants, R1 and R2 .
{R} = −[A]−1 {Δ L } (8.7)
Version 2 CE IIT, Kharagpur](https://image.slidesharecdn.com/m2l8-110208100646-phpapp01/85/M2l8-6-320.jpg)
![In the above equation the vectors {Δ L } contains the displacement values of the
primary structure at point 1 and 2, [A] is the flexibility matrix and {R} is column
vector of redundants required to be evaluated. In equation (8.7) the inverse of the
flexibility matrix is denoted by [A] . In the above example, the structure is
−1
indeterminate to second degree and the size of flexibility matrix is 2 × 2 . In
general, if the structure is redundant to a degree n , then the flexibility matrix is of
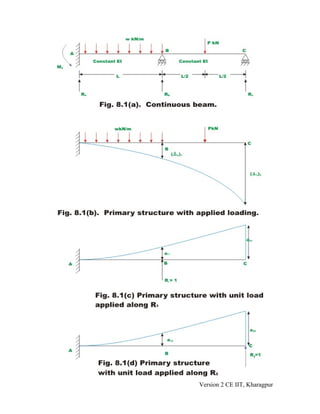
the order n × n . To demonstrate the procedure to evaluate deflection, consider
the problem given in Fig. 8.1a, with loading as given below
w=w; P = wL (8.8a)
Now, the deflection (Δ L )1 and (Δ L )2 of the released structure can be evaluated
from the equations (8.1a) and (8.1b) respectively. Then,
4
7 wL4 17 wL4
(Δ L )1 = − wL − =− (8.8b)
8 EI 12 EI 24 EI
7 wL4 27 wL4 95wL4
(Δ L )2 =− − =− (8.8c)
24 EI 16 EI 48EI
The negative sign indicates that both deflections are downwards. Hence the
vector {Δ L } is given by
wL4 ⎧34⎫
{Δ L } = − ⎨ ⎬ (8.8d)
48 EI ⎩95⎭
The flexibility matrix is determined from referring to figures 8.1c and 8.1d. Thus,
when the unit load corresponding to R1 is acting at B , the deflections are,
L3 5 L3
a11 = , a 21 = (8.8e)
3EI 6 EI
Similarly when the unit load is acting at C ,
5L3 8L3
a12 = , a 22 = (8.8f)
6 EI 3EI
The flexibility matrix can be written as,
L3 ⎡2 5 ⎤
[A] = ⎢5 16⎥ (8.8g)
6 EI ⎣ ⎦
Version 2 CE IIT, Kharagpur](https://image.slidesharecdn.com/m2l8-110208100646-phpapp01/85/M2l8-7-320.jpg)
![The inverse of the flexibility matrix can be evaluated by any of the standard
method. Thus,
16 − 5⎤
[A]−1 = 6 EI ⎡
3 ⎢ ⎥ (8.8h)
7 L ⎣− 5 2 ⎦
Now using equation (8.7) the redundants are evaluated. Thus,
⎧ R1 ⎫ 6 EI wL4 ⎡ 16 − 5⎤ ⎧34⎫
⎨ ⎬= 3 × ⎢− 5 2 ⎥ ⎨95⎬
⎩ R2 ⎭ 7 L 48 EI ⎣ ⎦⎩ ⎭
69 20
Hence, R1 = wL and R2 = wL (8.8i)
56 56
Once the redundants are evaluated, the other reaction components can be
evaluated by static equations of equilibrium.
Example 8.1
Calculate the support reactions in the continuous beam ABC due to loading as
shown in Fig. 8.2a. Assume EI to be constant throughout.
Version 2 CE IIT, Kharagpur](https://image.slidesharecdn.com/m2l8-110208100646-phpapp01/85/M2l8-8-320.jpg)



![The deflection (Δ L )1 and (Δ L )2 of the released structure can be evaluated from
unit load method. Thus,
4
3wL4 wL4
(Δ L )1 = − wL − =− (1)
8EI 8EI 2 EI
3
wL3 2 wL3
and (Δ L )2 = − wL − =− (2)
6 EI 2 EI 3EI
The negative sign indicates that (Δ L )1 is downwards and rotation (Δ L )2 is
clockwise. Hence the vector {Δ L } is given by
wL3 ⎧3L ⎫
{Δ L } = − ⎨ ⎬ (3)
6 EI ⎩4⎭
The flexibility matrix is evaluated by first applying unit load along redundant R1
and determining the deflections a11 and a 21 corresponding to redundants R1 and
R2 respectively (see Fig. 8.3d). Thus,
L3 L2
a11 = and a 21 = (4)
3EI 2 EI
Similarly, applying unit load in the direction of redundant R2 , one could evaluate
flexibility coefficients a12 and a 22 as shown in Fig. 8.3c.
L2 L
a12 = and a 22 = (5)
2 EI EI
Now the flexibility matrix is formulated as,
L ⎡2 L2 3L ⎤
[A] = ⎢ ⎥ (6)
6 EI ⎣ 3L 6⎦
The inverse of flexibility matrix is formulated as,
Version 2 CE IIT, Kharagpur](https://image.slidesharecdn.com/m2l8-110208100646-phpapp01/85/M2l8-12-320.jpg)
![− 3L ⎤
[A]−1 = 6 EI ⎡
6
3 ⎢ ⎥
3L ⎣− 3L 2 L2 ⎦
The redundants are evaluated from equation (8.7). Hence,
⎧ R1 ⎫ 6 EI ⎡ 6 − 3L ⎤ ⎛ wL3 ⎞⎧3L ⎫
⎨ ⎬ =− 3 ⎢ ⎥ ×⎜− ⎟⎨ ⎬
⎩ R2 ⎭ 3L ⎣− 3L 2 L2 ⎦ ⎜ 6 EI ⎟⎩ 4 ⎭
⎝ ⎠
w ⎧ 6L ⎫
= ⎨ ⎬
3 ⎩− L2 ⎭
wL2
R1 = 2wL and R2 = − (7)
3
The other two reactions ( R3 and R4 ) can be evaluated by equations of statics.
Thus,
wL2
R4 = M A = − and R1 = R A = − wL (8)
6
The bending moment and shear force diagrams are shown in Fig. 8.3g and
Fig.8.3h respectively.
Summary
In this lesson, statically indeterminate beams of degree more than one is solved
systematically using flexibility matrix method. Towards this end matrix notation is
adopted. Few illustrative examples are solved to illustrate the procedure. After
analyzing the continuous beam, reactions are calculated and bending moment
diagrams are drawn.
Version 2 CE IIT, Kharagpur](https://image.slidesharecdn.com/m2l8-110208100646-phpapp01/85/M2l8-13-320.jpg)

This document provides instructions for analyzing statically indeterminate beams using the matrix force method. It discusses: 1. Formulating the problem by selecting redundant reactions and determining the deflections of the primary structure due to applied loads. 2. Assembling the flexibility matrix relating deflections to applied forces at various points. 3. Setting up compatibility equations equating total deflections to zero and solving the equations in matrix form to determine redundant reactions. 4. Using the determined redundant reactions and equilibrium equations to calculate all reactions and internal forces for a given statically indeterminate beam problem. Two example problems are provided to demonstrate applying the procedure.