Download free for 30 days
Sign in
Upload
Language (EN)
Support
Business
Mobile
Social Media
Marketing
Technology
Art & Photos
Career
Design
Education
Presentations & Public Speaking
Government & Nonprofit
Healthcare
Internet
Law
Leadership & Management
Automotive
Engineering
Software
Recruiting & HR
Retail
Sales
Services
Science
Small Business & Entrepreneurship
Food
Environment
Economy & Finance
Data & Analytics
Investor Relations
Sports
Spiritual
News & Politics
Travel
Self Improvement
Real Estate
Entertainment & Humor
Health & Medicine
Devices & Hardware
Lifestyle
Change Language
Language
English
Español
Português
Français
Deutsche
Cancel
Save
EN
Uploaded by
noname409
3,331 views
ディジタル信号処理 課題解説 その7
Read more
0
Save
Share
Embed
Embed presentation
Download
Downloaded 21 times
1
/ 18
2
/ 18
3
/ 18
4
/ 18
5
/ 18
6
/ 18
7
/ 18
8
/ 18
9
/ 18
10
/ 18
11
/ 18
12
/ 18
13
/ 18
14
/ 18
15
/ 18
16
/ 18
17
/ 18
18
/ 18
More Related Content
PDF
ディジタル信号処理 課題解説 その4
by
noname409
PDF
ディジタル信号処理 課題解説 その8
by
noname409
PDF
ディジタル信号処理の課題解説
by
noname409
PDF
ディジタル信号処理 課題解説 その5
by
noname409
PDF
ディジタル信号処理 課題解説 その9
by
noname409
PDF
ディジタル信号処理の課題解説 その2
by
noname409
PDF
統計的因果推論 勉強用 isseing333
by
Issei Kurahashi
PDF
凸最適化 〜 双対定理とソルバーCVXPYの紹介 〜
by
Tomoki Yoshida
ディジタル信号処理 課題解説 その4
by
noname409
ディジタル信号処理 課題解説 その8
by
noname409
ディジタル信号処理の課題解説
by
noname409
ディジタル信号処理 課題解説 その5
by
noname409
ディジタル信号処理 課題解説 その9
by
noname409
ディジタル信号処理の課題解説 その2
by
noname409
統計的因果推論 勉強用 isseing333
by
Issei Kurahashi
凸最適化 〜 双対定理とソルバーCVXPYの紹介 〜
by
Tomoki Yoshida
What's hot
PPTX
動的計画法を極める!
by
HCPC: 北海道大学競技プログラミングサークル
PDF
ユークリッド最小全域木
by
理玖 川崎
PDF
ディジタル信号処理 課題解説(その1) 2014年度版
by
dsp_kyoto_2014
PDF
敵対的学習に対するラデマッハ複雑度
by
Masa Kato
PDF
PRML輪読#5
by
matsuolab
PPTX
A3C解説
by
harmonylab
PPTX
PRML第6章「カーネル法」
by
Keisuke Sugawara
PDF
遺伝的アルゴリズム (Genetic Algorithm)を始めよう!
by
Kazuhide Okamura
PPTX
古典的ゲームAIを用いたAlphaGo解説
by
suckgeun lee
PPTX
PRML Chapter 5
by
Masahito Ohue
PDF
多人数不完全情報ゲームにおけるAI ~ポーカーと麻雀を例として~
by
Kenshi Abe
PPTX
協力ゲーム理論でXAI (説明可能なAI) を目指すSHAP (Shapley Additive exPlanation)
by
西岡 賢一郎
PDF
目指せグラフマスター
by
HCPC: 北海道大学競技プログラミングサークル
PPTX
3次元の凸包を求める
by
abc3141
PDF
第8章 ガウス過程回帰による異常検知
by
Chika Inoshita
PPTX
ポーカーAIの最新動向 20171031
by
Jun Okumura
PDF
主成分分析
by
貴之 八木
PPTX
[DL輪読会]Monaural Audio Source Separationusing Variational Autoencoders
by
Deep Learning JP
PDF
Neural Processes Family
by
Kota Matsui
PDF
最小カットを使って「燃やす埋める問題」を解く
by
shindannin
動的計画法を極める!
by
HCPC: 北海道大学競技プログラミングサークル
ユークリッド最小全域木
by
理玖 川崎
ディジタル信号処理 課題解説(その1) 2014年度版
by
dsp_kyoto_2014
敵対的学習に対するラデマッハ複雑度
by
Masa Kato
PRML輪読#5
by
matsuolab
A3C解説
by
harmonylab
PRML第6章「カーネル法」
by
Keisuke Sugawara
遺伝的アルゴリズム (Genetic Algorithm)を始めよう!
by
Kazuhide Okamura
古典的ゲームAIを用いたAlphaGo解説
by
suckgeun lee
PRML Chapter 5
by
Masahito Ohue
多人数不完全情報ゲームにおけるAI ~ポーカーと麻雀を例として~
by
Kenshi Abe
協力ゲーム理論でXAI (説明可能なAI) を目指すSHAP (Shapley Additive exPlanation)
by
西岡 賢一郎
目指せグラフマスター
by
HCPC: 北海道大学競技プログラミングサークル
3次元の凸包を求める
by
abc3141
第8章 ガウス過程回帰による異常検知
by
Chika Inoshita
ポーカーAIの最新動向 20171031
by
Jun Okumura
主成分分析
by
貴之 八木
[DL輪読会]Monaural Audio Source Separationusing Variational Autoencoders
by
Deep Learning JP
Neural Processes Family
by
Kota Matsui
最小カットを使って「燃やす埋める問題」を解く
by
shindannin
Similar to ディジタル信号処理 課題解説 その7
PPTX
Digital Image Processing Chapter 5 – Image Restoration and Reconstruction- Fr...
by
Shunsuke KITADA
PDF
[DL輪読会]Control as Inferenceと発展
by
Deep Learning JP
PPTX
ディジタル信号処理 試験解説 2013年実施分
by
dsp_kyoto_2014
PDF
2014年度春学期 画像情報処理 第12回 画像フィルタとフィルタ定理 (2014. 7. 9.)
by
Akira Asano
PDF
2015年度春学期 画像情報処理 第12回 画像フィルタとフィルタ定理
by
Akira Asano
PDF
重回帰分析による推薦の透明性を有したモデルベース協調フィルタリング
by
Okamoto Laboratory, The University of Electro-Communications
PDF
スパースモデリングによる多次元信号・画像復元
by
Shogo Muramatsu
PDF
Stateless Circuit Model toward a Theorem-proving Hardware Description Language
by
Shunji Nishimura
PDF
演習発表 Sari v.1.1
by
Lutfiana Ariestien
PDF
Hayashi tutorial ne2017
by
yukisachi
Digital Image Processing Chapter 5 – Image Restoration and Reconstruction- Fr...
by
Shunsuke KITADA
[DL輪読会]Control as Inferenceと発展
by
Deep Learning JP
ディジタル信号処理 試験解説 2013年実施分
by
dsp_kyoto_2014
2014年度春学期 画像情報処理 第12回 画像フィルタとフィルタ定理 (2014. 7. 9.)
by
Akira Asano
2015年度春学期 画像情報処理 第12回 画像フィルタとフィルタ定理
by
Akira Asano
重回帰分析による推薦の透明性を有したモデルベース協調フィルタリング
by
Okamoto Laboratory, The University of Electro-Communications
スパースモデリングによる多次元信号・画像復元
by
Shogo Muramatsu
Stateless Circuit Model toward a Theorem-proving Hardware Description Language
by
Shunji Nishimura
演習発表 Sari v.1.1
by
Lutfiana Ariestien
Hayashi tutorial ne2017
by
yukisachi
ディジタル信号処理 課題解説 その7
1.
課題解説 その7
2.
LTIシステムとz変換 • 復習 • 課題43
連続時間と離散時間のインパルス関数 • 課題44 2次元離散時間信号の因果性 • 課題45 LTIシステムの出力の因果性の証明 • 課題46 IIRフィルタがLTIシステムであることの証明 • 課題47 システム関数の安定性条件 • 課題48 非線形フィルタの周波数特性
3.
LTIシステムの復習1 • 入力x[n]があり何かしらの変換を行って出力された応答をy[n] としたとき 𝑦 𝑛
= 𝐿[𝑥[𝑛]] と表す • この講義ではLは線形時不変システム(LTI)であるとする • 線形…𝐿 𝑎𝑥1 𝑛 + 𝑏𝑥2 𝑛 = 𝑎𝑦1 𝑛 + 𝑏𝑦2 [𝑛] • 時不変…y 𝑛 = 𝐿[𝑥[𝑛]] ↔ 𝑦 𝑛 − 𝑘 = 𝐿[𝑥[𝑛 − 𝑘]] • LTIシステムであることは以下の式が成り立つ(下式の立式に 上二つの式を用いる) 𝑦 𝑛 = ∞ 𝑘=−∞ 𝑥 𝑘 ℎ[𝑛 − 𝑘] • hはシステムのインパルス応答である(ℎ 𝑛 = 𝐿[𝛿[𝑛]]) • 要するに入力とシステムのインパルス応答の畳み込みで求まる
4.
LTIシステムの復習2 LTIシステムの種類 • 有限長インパルス応答システム(FIR) • インパルス応答 単位インパルス𝛿[𝑛]をシステム に入力した時の応答 ℎ
𝑛 = 𝐿[𝛿[𝑛]] • インパルス応答の長さが有限 • 𝑦 𝑛 = 𝑀 𝑘=0 𝑥 𝑛 − 𝑘 ℎ[𝑘] • 無限長インパルス応答システム(IIR) • インパルス応答の長さが無限 • 通常の畳み込みの計算は無限の総和になるため計算できないが,再帰 的に計算すれば有限の総和で計算可能 𝑀 𝑁 • 𝑦 𝑛 = 𝑘=0 𝑎 𝑘 𝑥 𝑛 − 𝑘 − 𝑘=0 𝑏 𝑘 𝑦 𝑛 − 𝑘 • 例:ℎ 𝑛 = 𝛼 𝑛 𝑢0 [𝑛]の場合(𝑢0 [𝑛]はステップ関数) 𝑦 𝑛 = ∞ 𝛼 𝑘 𝑥 𝑛 − 𝑘 = ∞ 𝛼 𝑘 𝑥 𝑛 − 𝑘 + 𝛼 0 𝑥[𝑛] 𝑘=0 𝑘=1 ∞ 𝑙+1 𝑥 𝑛 − 𝑙 + 1 = + 𝑥[𝑛] (𝑙 = 𝑘 − 1) 𝑙=0 𝛼 = 𝛼 ∞ 𝛼 𝑙 𝑥 (𝑛 − 1) − 𝑙 + 𝑥[𝑛] 𝑙=0 = 𝛼𝑦 𝑛 − 1 + 𝑥[𝑛] と記述できる.一般化すると上式になる
5.
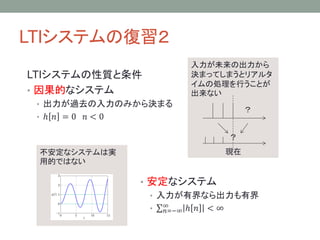
LTIシステムの復習2 LTIシステムの性質と条件 • 因果的なシステム 入力が未来の出力から 決まってしまうとリアルタ イムの処理を行うことが できない • 出力が過去の入力のみから決まる •
ℎ 𝑛 =0 ? 𝑛<0 ? 不安定なシステムは実 用的ではない 現在 • 安定なシステム • 入力が有界なら出力も有界 • ∞ 𝑛=−∞ ℎ 𝑛 < ∞
6.
z変換の復習 • 定義 𝑋 𝑧
= ∞ 𝑛=0 𝑥 𝑛 𝑧 −𝑛 • z変換はラプラス変換の離散化したものである • 導出はフーリエ→ラプラスの時と同様に離散フーリエから始め る • 離散フーリエに1.𝑒 −𝑐𝑛 をかける2.単位ステップ関数をかける3.𝑒 𝑐+𝑗𝜔𝑛 を zと置く • このようにzを置くことによって特性がわかりやすくなる • ディジタルフィルタをz変換して記述するとn時刻分の遅延を 𝑧 −𝑛 で表すことが出来る.
7.
課題43 連続時間インパルス関数の𝛿(𝑡)と離散時間インパル ス関数𝛿[t]の違いを述べなさい.
8.
課題43 ヒントにあるように… • 両者の周波数特性を比較してみよう 𝛿(𝑡) ↔
1 𝛿[𝑡] ↔ ∞ 𝑛=−∞ -π<Ω<πでずっと 離散値1を出力する 𝛿 𝑛 𝑒 −𝑗nΩ 時間領域 周波数領域
9.
課題44 2次元離散時間信号の処理において,因果的,非因 果的はどのように定義すればよいのだろうか? つまり,1次元の場合は,時間という全順序が あるが、 2次元(以上)の場合は,順序自身を定義しなければ ならない. 制御理論も含め,いわゆる信号処理分野では,因果 性を想定した理論が主流であるが,画像処理では,因 果性はほとんど気にされない. この理由を考察しなさい.
10.
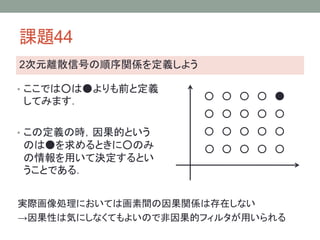
課題44 2次元離散信号の順序関係を定義しよう • ここでは○は●よりも前と定義 する • この定義において,因果的と いうのは●を求めるときに○ のみの情報を用いて決定する ということである. 実際画像処理においては画素間の因果関係は存在しない →因果性は気にしなくてもよいので非因果的フィルタが用いられる
11.
課題45 LTIシステムにおいてx[n]が因果的であるならばy[n]も 因果的であることを証明しなさい
12.
課題45 因果的なシステムにおいて以下が成り立つ ℎ 𝑘 =
0 (𝑘 < 0) ∞ 𝑦 𝑛 = ∞ 𝑘=−∞ 𝑥 𝑘 ℎ[𝑛 − 𝑘] = 𝑘=0 𝑥 𝑘 ℎ[𝑛 − 𝑘] さらにx[n]が因果的であるならば𝑥 𝑘 = 0 (𝑘 < 0)を満たす. 以上より𝑦 𝑘 = 0 (𝑘 < 0)となりyは因果的になることが証明さ れた.
13.
課題46 定係数線形差分方程式がLTIシステムであることを証 明しなさい
14.
課題46 LTIシステムである↔線形性・時不変性を満たす • 線形性 𝑦1 𝑛
= 𝑀 𝑘=0 𝑀 𝑘=0 𝑎 𝑘 𝑥1 𝑛 − 𝑘 − 𝑁 𝑘=1 𝑁 𝑘=1 𝑏 𝑘 𝑦1 [𝑛 − 𝑘] 𝑦2 𝑛 = 𝑎 𝑘 𝑥2 𝑛 − 𝑘 − 𝑏 𝑘 𝑦2 [𝑛 − 𝑘] 𝑝𝑦1 𝑛 + 𝑞𝑦2 𝑛 = 𝑀 𝑁 𝑘=0 𝑎 𝑘 {𝑝𝑥1 𝑛 − 𝑘 + 𝑞𝑥2 𝑛 − 𝑘 } − 𝑘=1 𝑏 𝑘 {𝑝𝑦1 𝑛 − 𝑘 + 𝑞𝑦2 𝑛 − 𝑘 } • 時不変性 𝑛 → 𝑛 − 𝑙とすると 𝑀 𝑦 𝑛 − 𝑙 = 𝑘=0 𝑎 𝑘 𝑥 𝑛 − 𝑙 − 𝑘 − 𝑁 𝑘=1 𝑏 𝑘 𝑦 [𝑛 − 𝑙 − 𝑘]
15.
課題47 インパルス応答h[n]が絶対総和可能の時システム関 数の極𝑧 𝑛 がすべてz平面の単位円内に存在することを 証明しなさい
16.
課題47 ℎ[𝑛]が絶対総和可能↔ ∞ 𝑛=−∞ ℎ
𝑛 < ∞ 極𝑧 𝑛 がすべてz平面の単位円内に存在する↔ 𝛽 𝑛 < 1 伝達関数H[z]が以下の形で表せるとする 𝐻 𝑧 = 𝐶 𝑀 (1−𝛼 𝑧 −1 ) 𝑚 𝑚=1 𝑁 −1 𝑛=1(1−𝛽 𝑛 𝑧 ) 部分分数分解して 𝐴1 𝐴2 𝐵1 𝐵2 𝐵𝑁 𝐻 𝑧 = 𝐴0 + + 2 + ⋯+ + + ⋯+ −1 −1 𝑧 𝑧 1 − 𝛽1 𝑧 1 − 𝛽2 𝑧 1 − 𝛽 𝑁 𝑧 −1 これを逆z変換すると ℎ 𝑛 = 𝐴0 𝛿 𝑛 + 𝐴1 𝛿 𝑛 − 1 + 𝐴2 𝛿 𝑛 − 2 + ⋯ + 𝐵1 𝛽1𝑛 + 𝐵2 𝛽2𝑛 + ⋯ h[n]が絶対総和可能なので|𝛽 𝑛 | < 1よって極は全て単位円内に存在する
17.
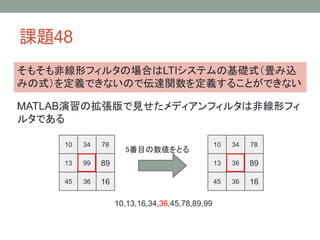
課題48 メディアンフィルタやヘッジ保存スムージングといった非 線形フィルタの周波数特性はどうなるか考えてみよう
18.
課題48 そもそも非線形フィルタの場合はLTIシステムの基礎式(畳み込 みの式)を定義できないので伝達関数を定義することができない MATLAB演習の拡張版で見せたメディアンフィルタは非線形フィ ルタである 10 34 78 10 34 78 13 99 89 13 36 89 45 36 16 45 36 16 5番目の数値をとる 10,13,16,34,36,45,78,89,99
Download
![LTIシステムの復習1
• 入力x[n]があり何かしらの変換を行って出力された応答をy[n]
としたとき
𝑦 𝑛 = 𝐿[𝑥[𝑛]]
と表す
• この講義ではLは線形時不変システム(LTI)であるとする
• 線形…𝐿 𝑎𝑥1 𝑛 + 𝑏𝑥2 𝑛
= 𝑎𝑦1 𝑛 + 𝑏𝑦2 [𝑛]
• 時不変…y 𝑛 = 𝐿[𝑥[𝑛]] ↔ 𝑦 𝑛 − 𝑘 = 𝐿[𝑥[𝑛 − 𝑘]]
• LTIシステムであることは以下の式が成り立つ(下式の立式に
上二つの式を用いる)
𝑦 𝑛 =
∞
𝑘=−∞
𝑥 𝑘 ℎ[𝑛 − 𝑘]
• hはシステムのインパルス応答である(ℎ 𝑛 = 𝐿[𝛿[𝑛]])
• 要するに入力とシステムのインパルス応答の畳み込みで求まる](https://image.slidesharecdn.com/lti1-140115042702-phpapp01/85/7-3-320.jpg)
![LTIシステムの復習2
LTIシステムの種類
• 有限長インパルス応答システム(FIR)
• インパルス応答
単位インパルス𝛿[𝑛]をシステム
に入力した時の応答
ℎ 𝑛 = 𝐿[𝛿[𝑛]]
• インパルス応答の長さが有限
• 𝑦 𝑛 =
𝑀
𝑘=0
𝑥 𝑛 − 𝑘 ℎ[𝑘]
• 無限長インパルス応答システム(IIR)
• インパルス応答の長さが無限
• 通常の畳み込みの計算は無限の総和になるため計算できないが,再帰
的に計算すれば有限の総和で計算可能
𝑀
𝑁
• 𝑦 𝑛 = 𝑘=0 𝑎 𝑘 𝑥 𝑛 − 𝑘 − 𝑘=0 𝑏 𝑘 𝑦 𝑛 − 𝑘
• 例:ℎ 𝑛 = 𝛼 𝑛 𝑢0 [𝑛]の場合(𝑢0 [𝑛]はステップ関数)
𝑦 𝑛 = ∞ 𝛼 𝑘 𝑥 𝑛 − 𝑘 = ∞ 𝛼 𝑘 𝑥 𝑛 − 𝑘 + 𝛼 0 𝑥[𝑛]
𝑘=0
𝑘=1
∞
𝑙+1 𝑥 𝑛 − 𝑙 + 1
=
+ 𝑥[𝑛] (𝑙 = 𝑘 − 1)
𝑙=0 𝛼
= 𝛼 ∞ 𝛼 𝑙 𝑥 (𝑛 − 1) − 𝑙 + 𝑥[𝑛]
𝑙=0
= 𝛼𝑦 𝑛 − 1 + 𝑥[𝑛] と記述できる.一般化すると上式になる](https://image.slidesharecdn.com/lti1-140115042702-phpapp01/85/7-4-320.jpg)
![課題43
連続時間インパルス関数の𝛿(𝑡)と離散時間インパル
ス関数𝛿[t]の違いを述べなさい.](https://image.slidesharecdn.com/lti1-140115042702-phpapp01/85/7-7-320.jpg)
![課題43
ヒントにあるように…
• 両者の周波数特性を比較してみよう
𝛿(𝑡) ↔ 1
𝛿[𝑡] ↔
∞
𝑛=−∞
-π<Ω<πでずっと
離散値1を出力する
𝛿 𝑛 𝑒 −𝑗nΩ
時間領域
周波数領域](https://image.slidesharecdn.com/lti1-140115042702-phpapp01/85/7-8-320.jpg)
![課題45
LTIシステムにおいてx[n]が因果的であるならばy[n]も
因果的であることを証明しなさい](https://image.slidesharecdn.com/lti1-140115042702-phpapp01/85/7-11-320.jpg)
![課題45
因果的なシステムにおいて以下が成り立つ
ℎ 𝑘 = 0 (𝑘 < 0)
∞
𝑦 𝑛 = ∞
𝑘=−∞ 𝑥 𝑘 ℎ[𝑛 − 𝑘] =
𝑘=0 𝑥 𝑘 ℎ[𝑛 − 𝑘]
さらにx[n]が因果的であるならば𝑥 𝑘 = 0 (𝑘 < 0)を満たす.
以上より𝑦 𝑘 = 0 (𝑘 < 0)となりyは因果的になることが証明さ
れた.](https://image.slidesharecdn.com/lti1-140115042702-phpapp01/85/7-12-320.jpg)
![課題46
LTIシステムである↔線形性・時不変性を満たす
• 線形性
𝑦1 𝑛 =
𝑀
𝑘=0
𝑀
𝑘=0
𝑎 𝑘 𝑥1 𝑛 − 𝑘 −
𝑁
𝑘=1
𝑁
𝑘=1
𝑏 𝑘 𝑦1 [𝑛 − 𝑘]
𝑦2 𝑛 =
𝑎 𝑘 𝑥2 𝑛 − 𝑘 −
𝑏 𝑘 𝑦2 [𝑛 − 𝑘]
𝑝𝑦1 𝑛 + 𝑞𝑦2 𝑛 =
𝑀
𝑁
𝑘=0 𝑎 𝑘 {𝑝𝑥1 𝑛 − 𝑘 + 𝑞𝑥2 𝑛 − 𝑘 } −
𝑘=1 𝑏 𝑘 {𝑝𝑦1 𝑛 − 𝑘 + 𝑞𝑦2 𝑛 − 𝑘 }
• 時不変性
𝑛 → 𝑛 − 𝑙とすると
𝑀
𝑦 𝑛 − 𝑙 = 𝑘=0 𝑎 𝑘 𝑥 𝑛 − 𝑙 − 𝑘 −
𝑁
𝑘=1
𝑏 𝑘 𝑦 [𝑛 − 𝑙 − 𝑘]](https://image.slidesharecdn.com/lti1-140115042702-phpapp01/85/7-14-320.jpg)
![課題47
インパルス応答h[n]が絶対総和可能の時システム関
数の極𝑧 𝑛 がすべてz平面の単位円内に存在することを
証明しなさい](https://image.slidesharecdn.com/lti1-140115042702-phpapp01/85/7-15-320.jpg)
![課題47
ℎ[𝑛]が絶対総和可能↔ ∞
𝑛=−∞ ℎ 𝑛 < ∞
極𝑧 𝑛 がすべてz平面の単位円内に存在する↔ 𝛽 𝑛 < 1
伝達関数H[z]が以下の形で表せるとする
𝐻 𝑧 = 𝐶
𝑀 (1−𝛼 𝑧 −1 )
𝑚
𝑚=1
𝑁
−1
𝑛=1(1−𝛽 𝑛 𝑧 )
部分分数分解して
𝐴1
𝐴2
𝐵1
𝐵2
𝐵𝑁
𝐻 𝑧 = 𝐴0 +
+ 2 + ⋯+
+
+ ⋯+
−1
−1
𝑧
𝑧
1 − 𝛽1 𝑧
1 − 𝛽2 𝑧
1 − 𝛽 𝑁 𝑧 −1
これを逆z変換すると
ℎ 𝑛 = 𝐴0 𝛿 𝑛 + 𝐴1 𝛿 𝑛 − 1 + 𝐴2 𝛿 𝑛 − 2 + ⋯ + 𝐵1 𝛽1𝑛 + 𝐵2 𝛽2𝑛 + ⋯
h[n]が絶対総和可能なので|𝛽 𝑛 | < 1よって極は全て単位円内に存在する](https://image.slidesharecdn.com/lti1-140115042702-phpapp01/85/7-16-320.jpg)
























![[DL輪読会]Monaural Audio Source Separationusing Variational Autoencoders](https://cdn.slidesharecdn.com/ss_thumbnails/20190717dlmonauralaudiosourceseparationusingvariationalautoencodersver2-190719035345-thumbnail.jpg?width=640&height=640&fit=bounds)



![[DL輪読会]Control as Inferenceと発展](https://cdn.slidesharecdn.com/ss_thumbnails/20191004-191204055019-thumbnail.jpg?width=640&height=640&fit=bounds)







