Downloaded 10 times



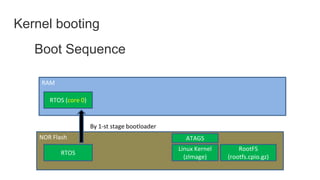
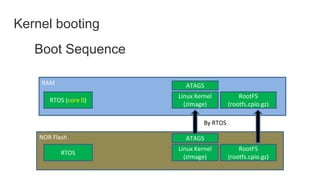
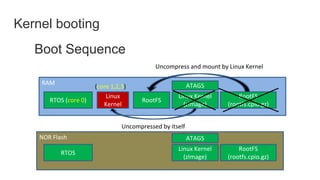
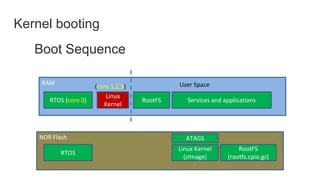


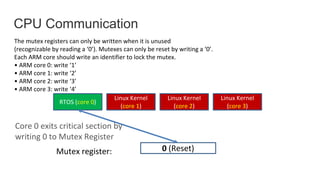
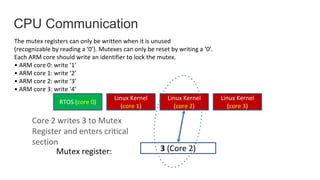















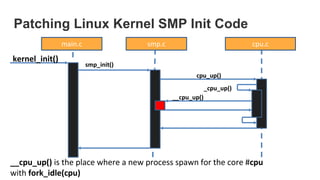
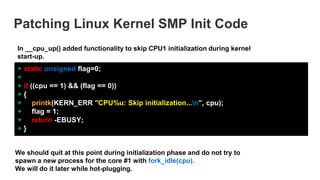
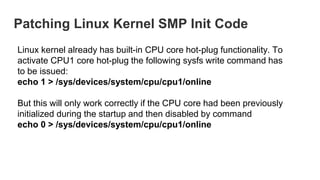










The document discusses the implementation of CPU hotplugging for a multicore system running real-time operating systems (RTOS) and Linux simultaneously on different cores. It outlines the correct boot sequence, inter-CPU synchronization mechanisms, and modifications needed in the Linux kernel to facilitate hotplugging. Key steps include managing mutex communication, modifying initialization processes, and ensuring proper CPU state transitions during hotplug events.