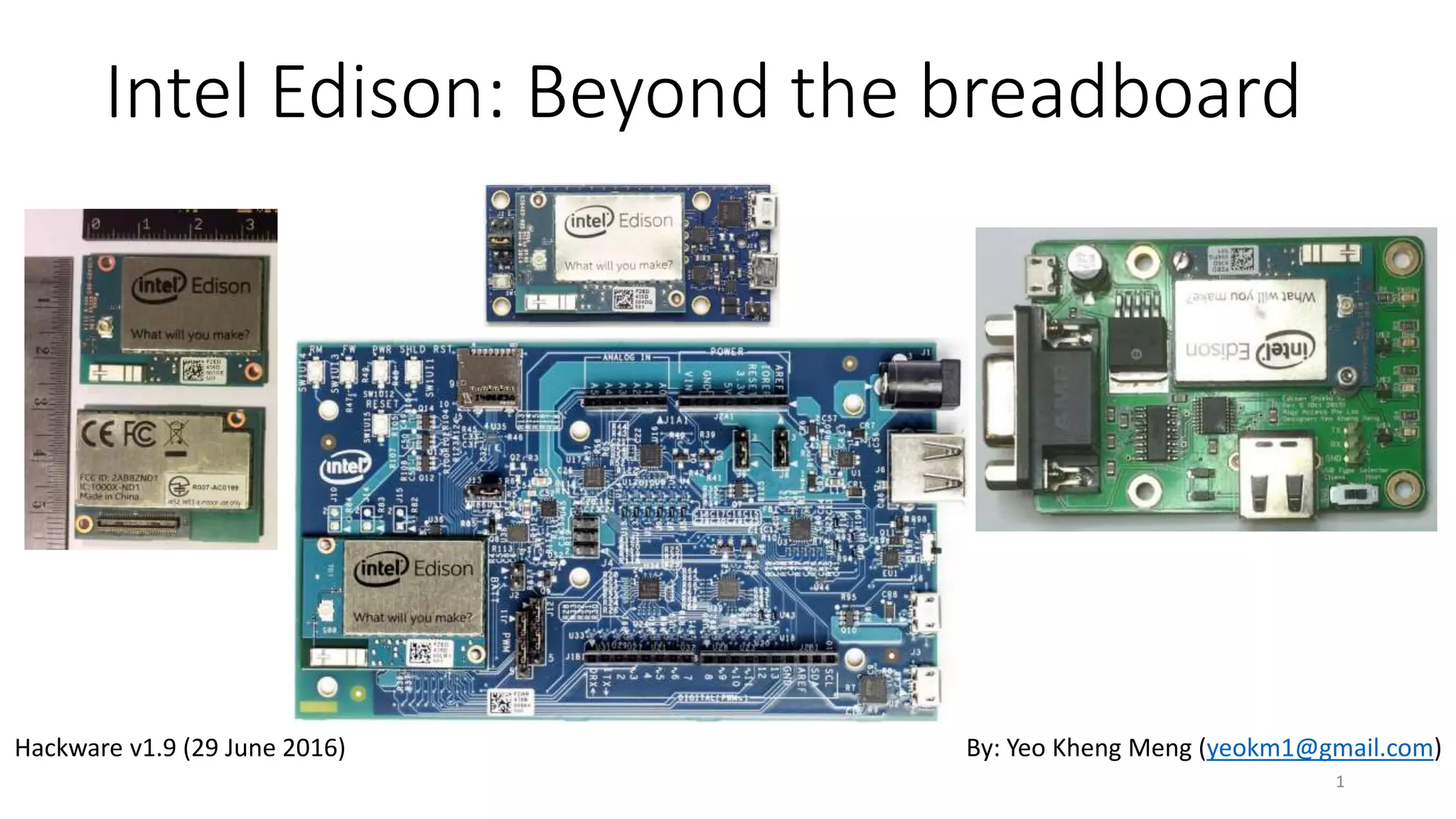
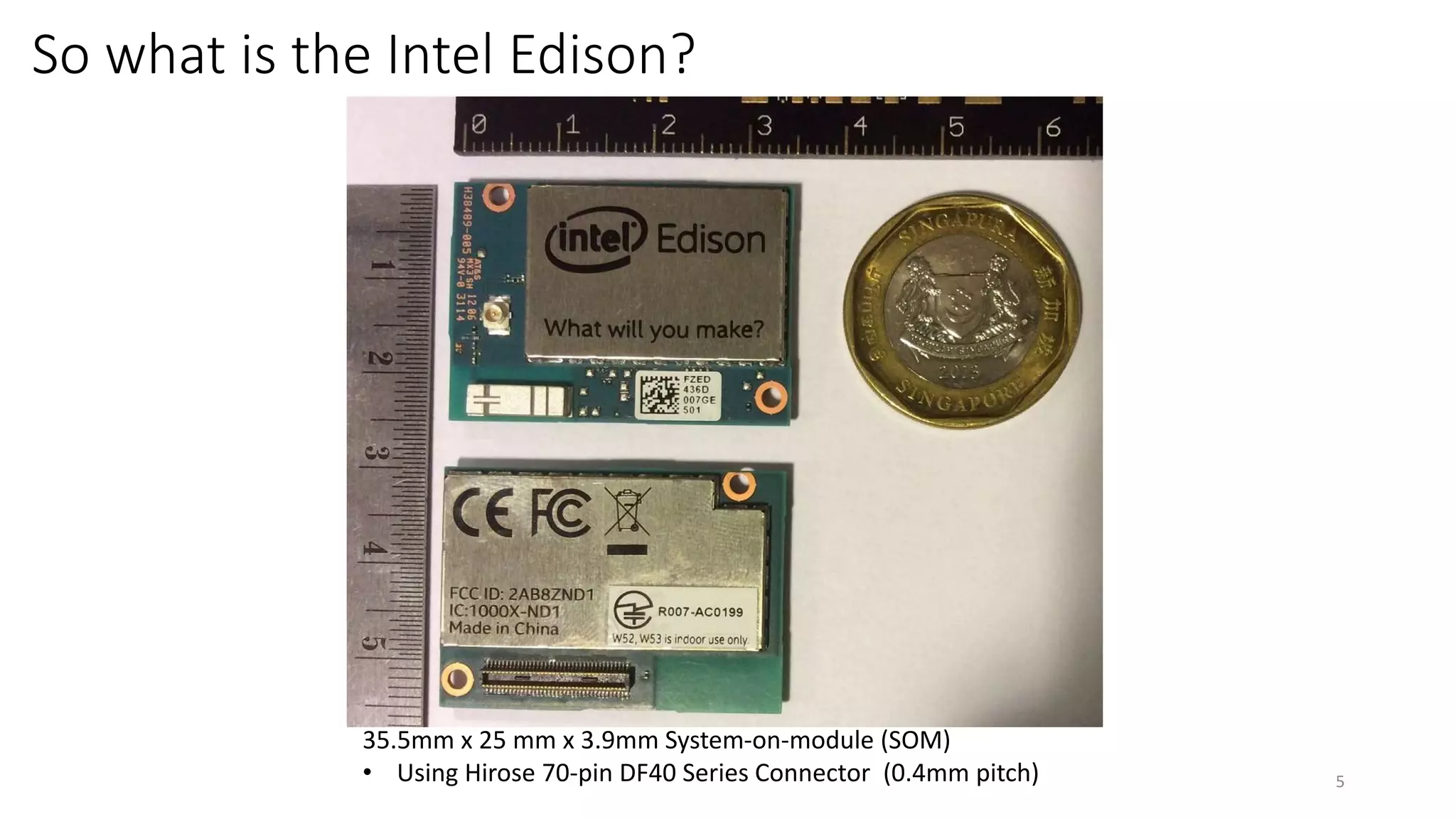
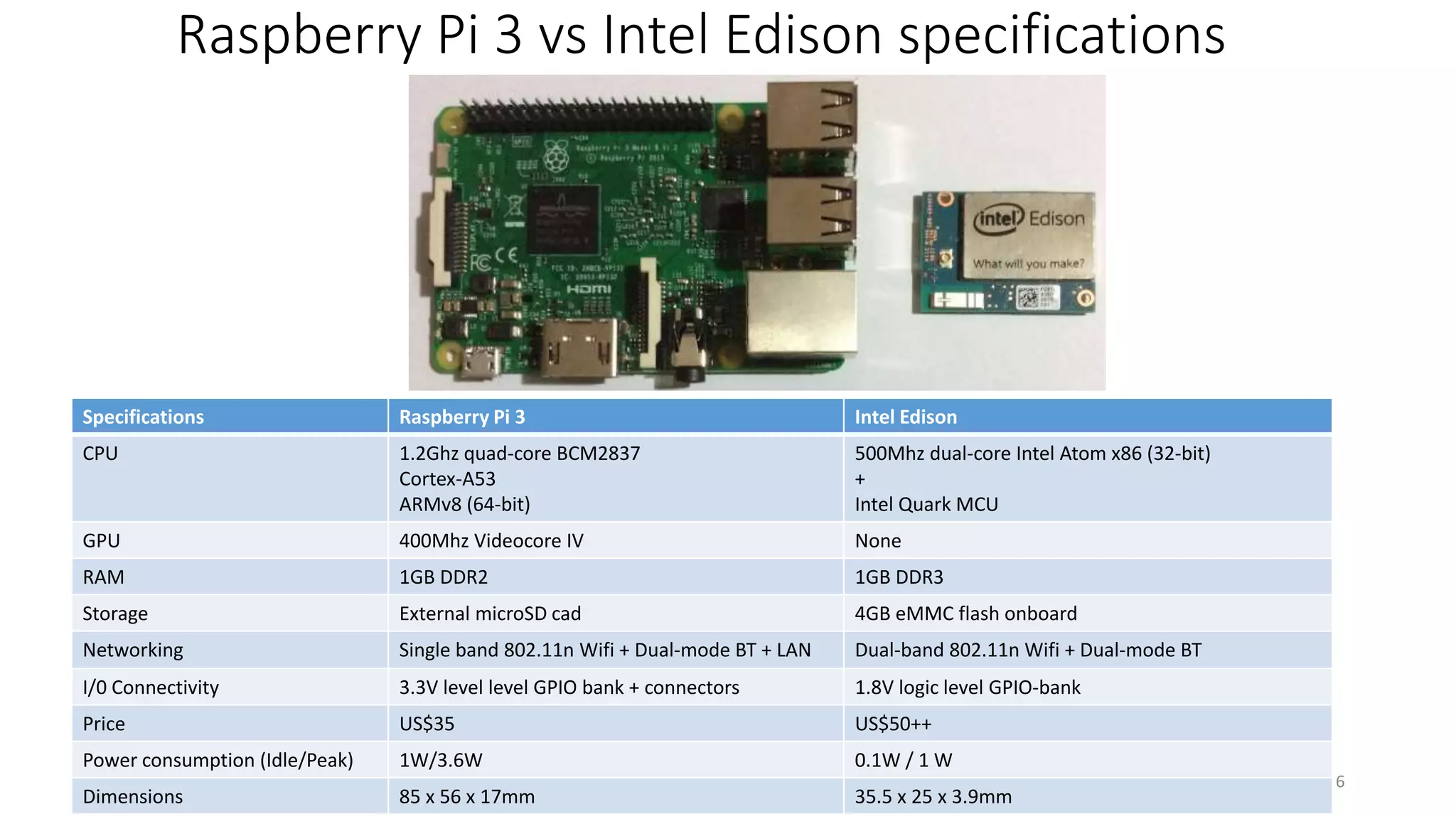
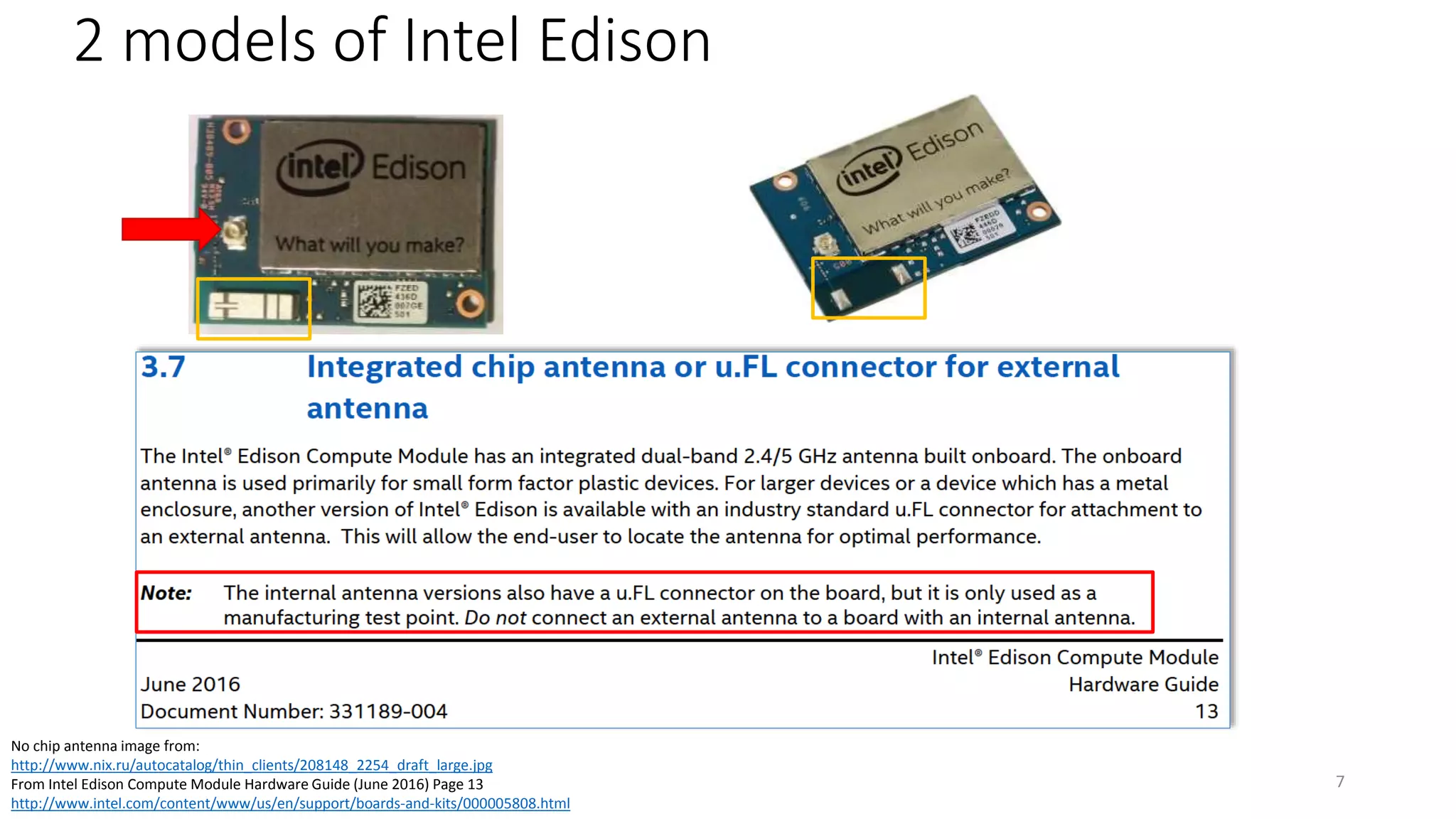
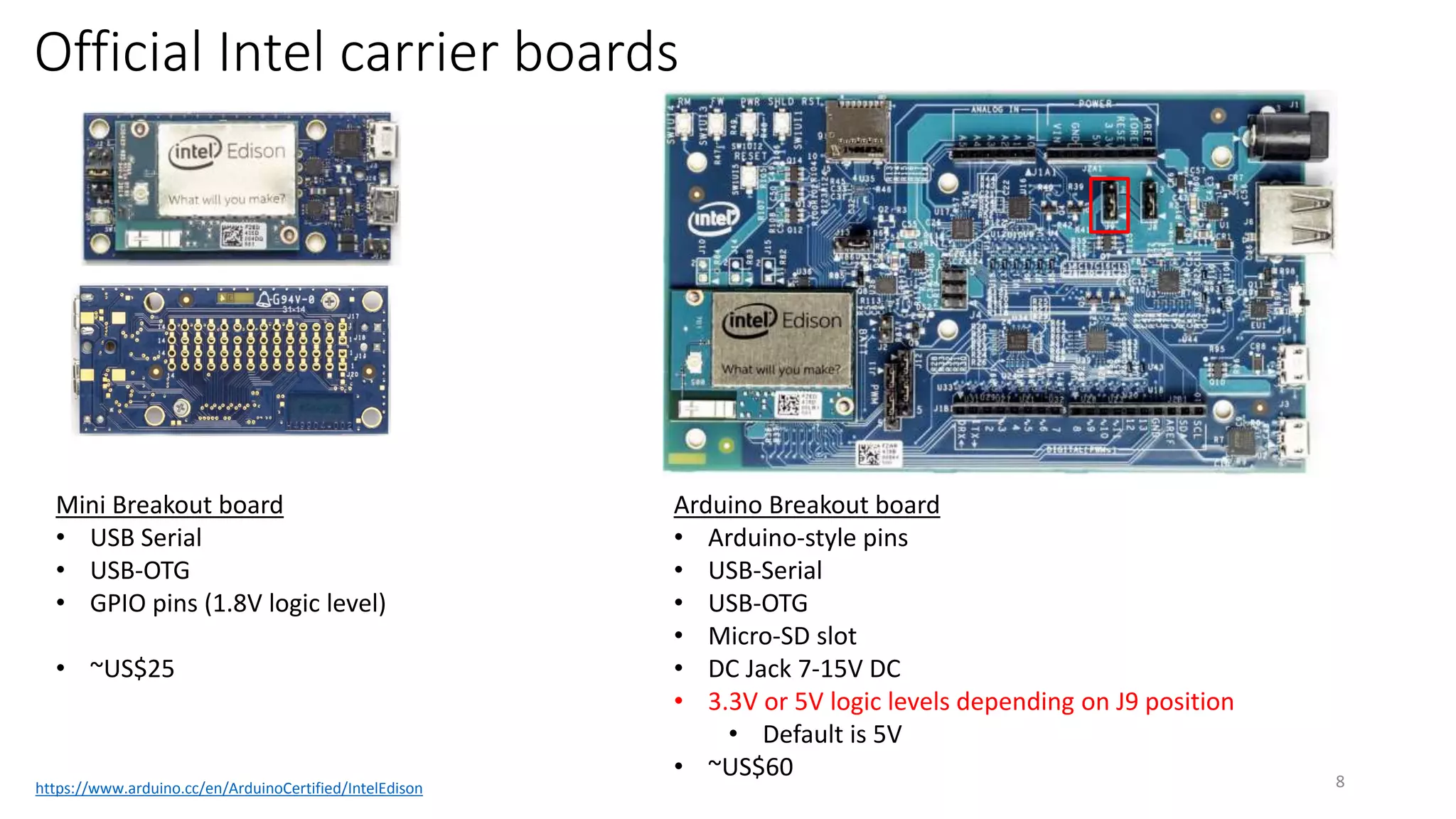
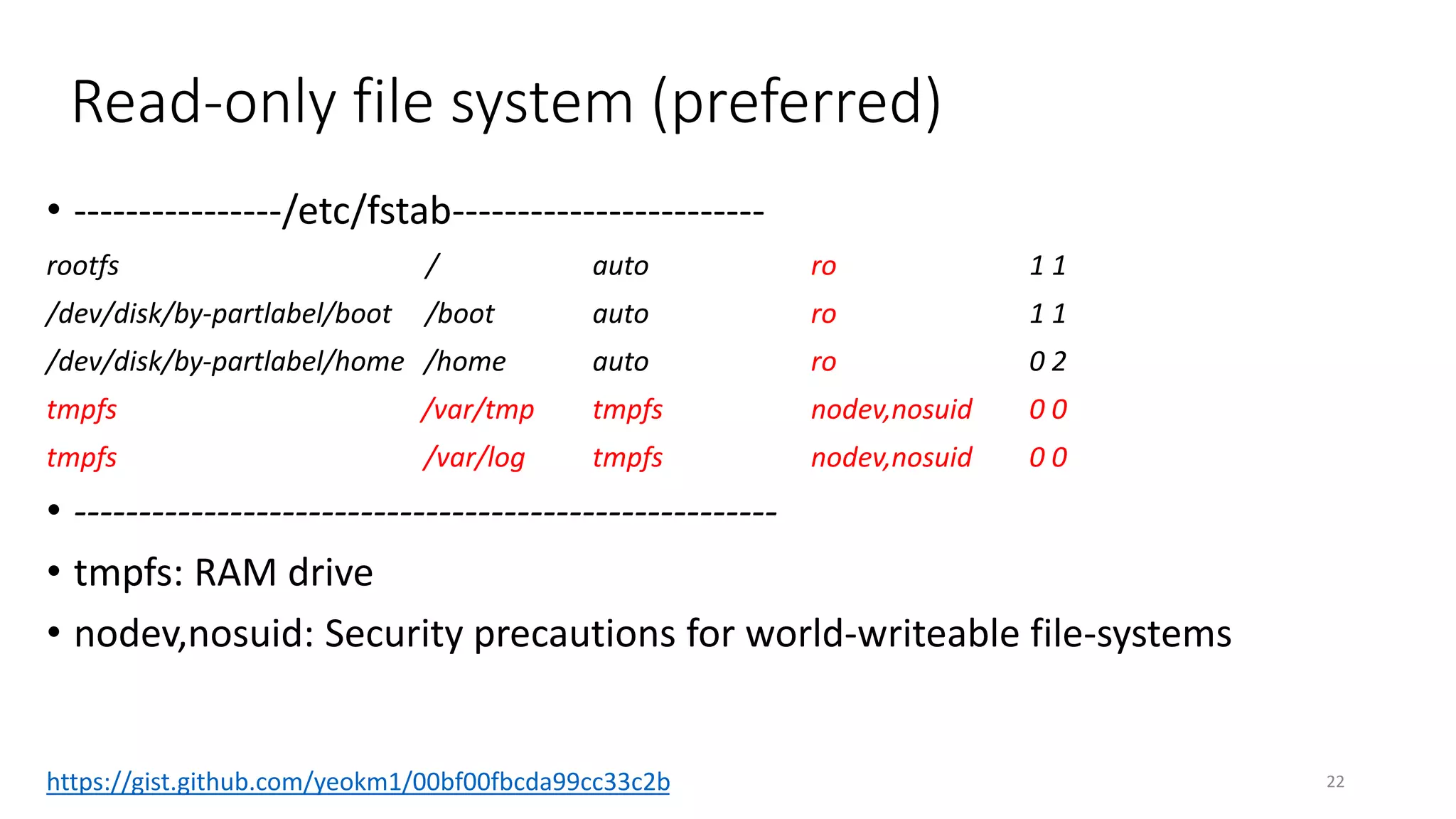
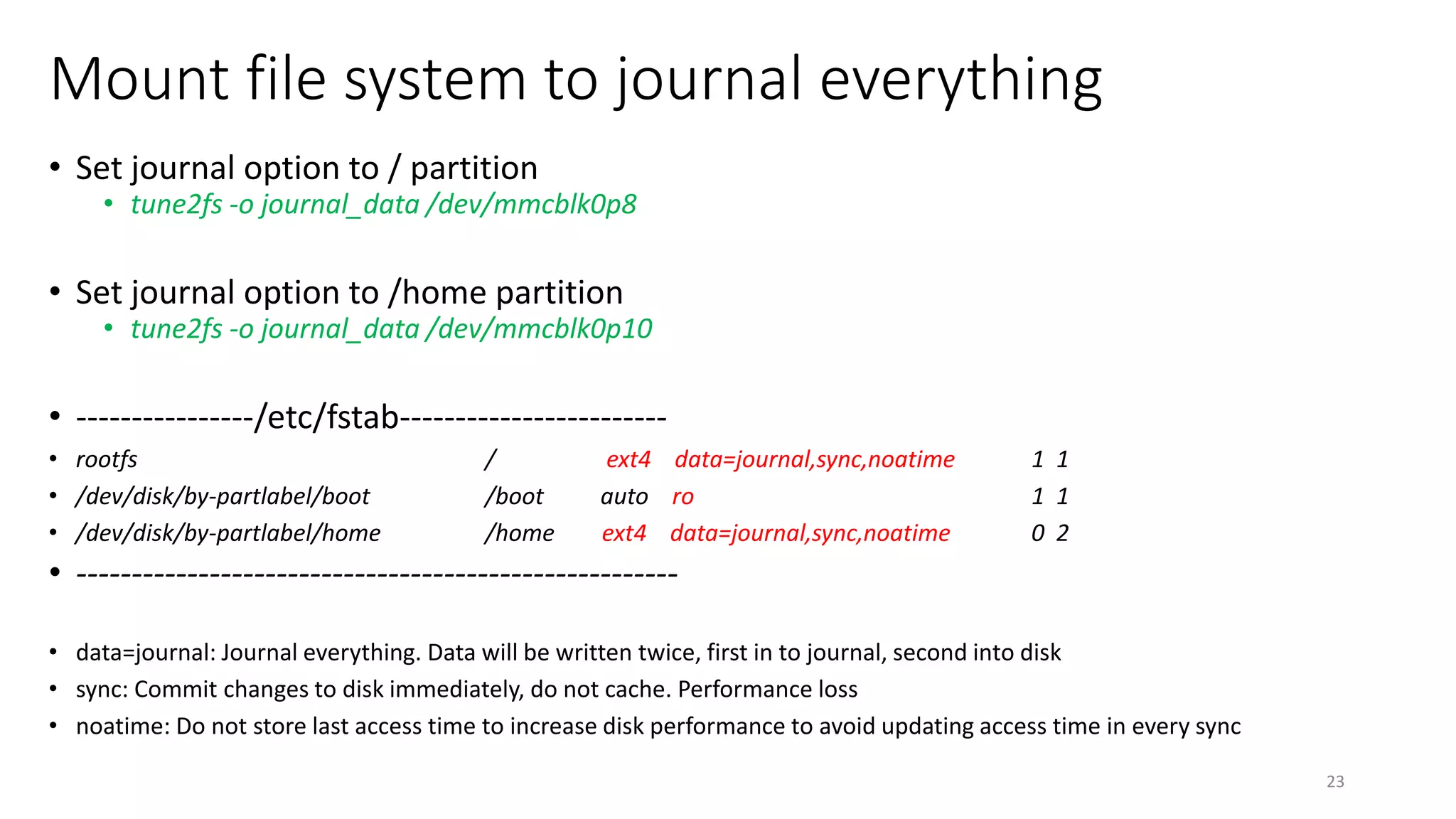
The document discusses the Intel Edison, a compact system-on-module with specifications compared to the Raspberry Pi 3. It covers hardware and software experiences, connectivity options, and potential issues with GPIO usage impacting performance. Additionally, it details Linux distributions and file system safety protocols for embedded systems, emphasizing the importance of ensuring system integrity during operations.




![Introduction to ESP32 Programming [Road to RIoT 2017]](https://cdn.slidesharecdn.com/ss_thumbnails/roadtoriotsurabayagettingstartedesp32-170726155154-thumbnail.jpg?width=640&height=640&fit=bounds)
![Introduction to RIoT Hardware Kits & ESP32 Programming [Road to RIoT 2017]](https://cdn.slidesharecdn.com/ss_thumbnails/roadtoriotjakartariothardwarekitsesp32programming-170806090914-thumbnail.jpg?width=640&height=640&fit=bounds)





![[5]投影片 futurewad樹莓派研習會 141218](https://cdn.slidesharecdn.com/ss_thumbnails/5futurewad141218-141219162301-conversion-gate02-thumbnail.jpg?width=640&height=640&fit=bounds)




































































![Vibe Coding vs. Spec-Driven Development [Free Meetup]](https://cdn.slidesharecdn.com/ss_thumbnails/vibecodingvsspecdrivendevelopment-251209105622-43f455e7-thumbnail.jpg?width=640&height=640&fit=bounds)












