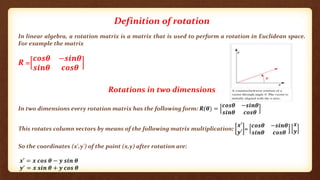
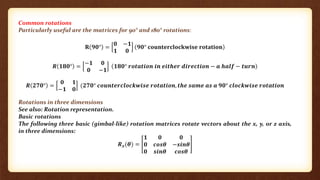
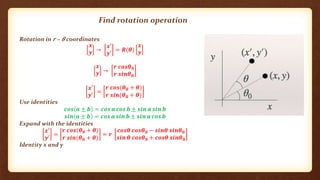
1. The document defines rotation and reflection transformations in 2D and 3D spaces. It discusses rotation matrices for rotating vectors by certain angles like 90°, 180°, and 270° degrees.
2. Reflection is defined as a flip across a line or point. Reflections across the x-axis, y-axis, and lines like y=x and y=-x are described.
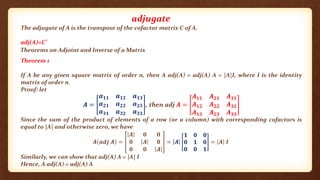
3. The adjugate of a matrix is defined as the transpose of its cofactor matrix. Some theorems about the adjugate and inverse of matrices are stated.