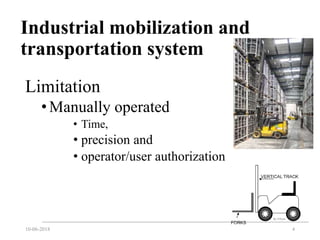
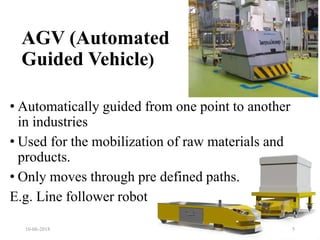
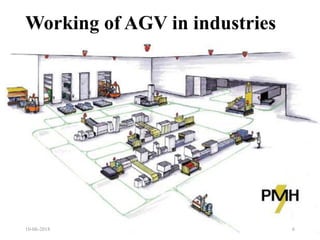
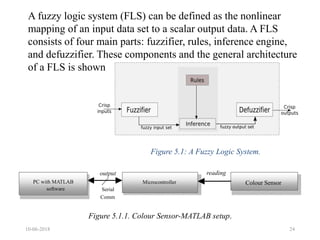
This document summarizes a research paper that designed and implemented an RFID line-follower robot system with color detection capabilities using fuzzy logic. The system allows a robot to follow multiple colored tracks by using LED lights to detect color with an LDR sensor. RFID tags provide input to determine which color track to take. A microcontroller integrates the sensor readings and uses a fuzzy logic inference system and rule base to generate motor control signals. The system was tested for color track detection, response to brightness and reflectiveness, and for selecting tracks based on RFID input. Limitations and suggestions for improvement are also discussed.
![About the paper
•Title
Design and Implementation of RFID Line-
Follower Robot System with Color Detection
Capability using Fuzzy Logic
•Authors
M B. Nugraha [Telkom University Bandung, Indonesia]
Rizki Ardianto P [Telkom University Bandung, Indonesia]
Denny Darlis [Telkom University Bandung, Indonesia]
Year: 2015
10-06-2018 2](https://image.slidesharecdn.com/line-followerrobotwithcolordetectioncapability-180610082525/85/Line-follower-robot-with-color-detection-capability-2-320.jpg)