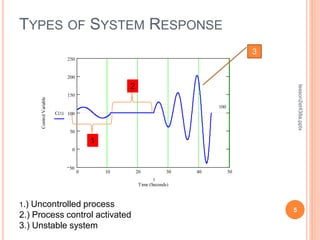
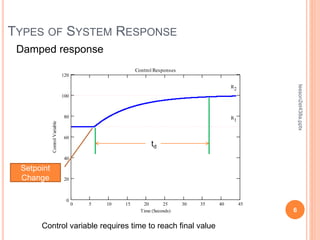
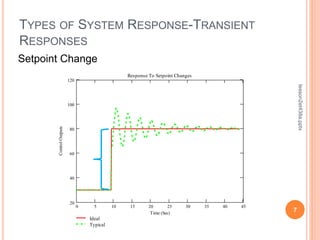
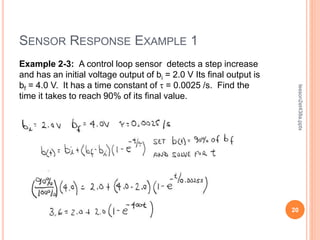
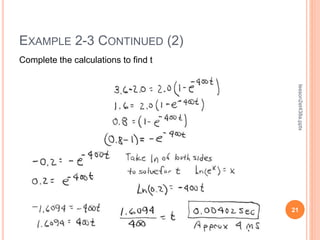
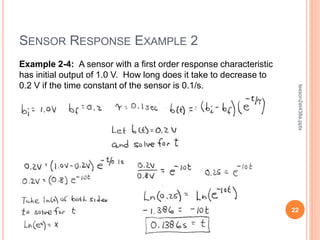
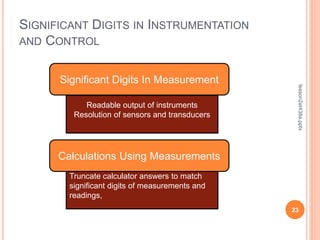
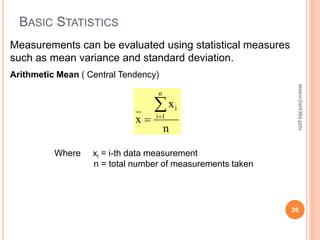
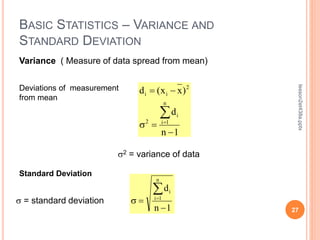
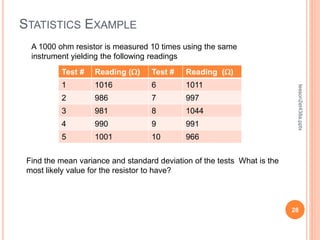
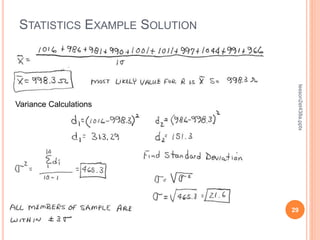
This document discusses control system performance and sensor characteristics. It begins by explaining that good control system performance means minimizing error over time. It then describes different types of system responses, including uncontrolled, controlled, and unstable responses. It also addresses sensor response characteristics like sensitivity, hysteresis, resolution, and linearity. Finally, it covers topics like significant digits, statistics, and calculating mean, variance, and standard deviation to analyze sensor measurements.