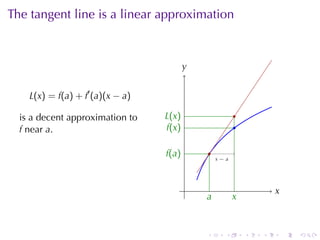
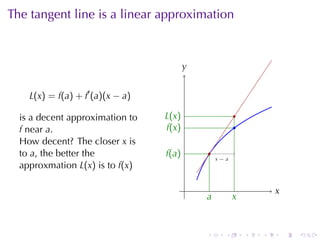
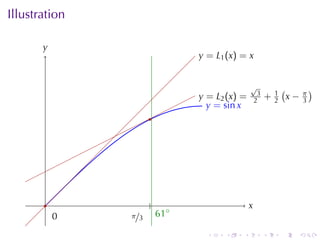
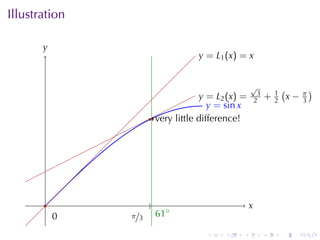
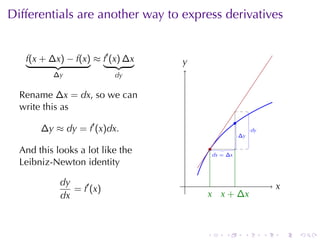
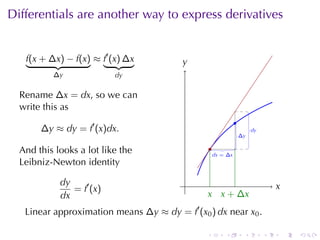
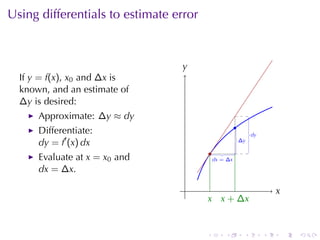
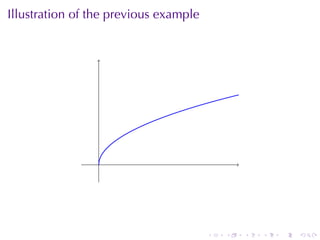
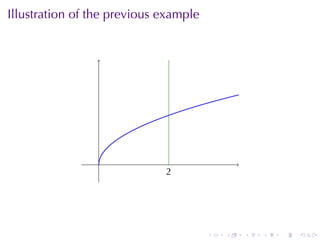
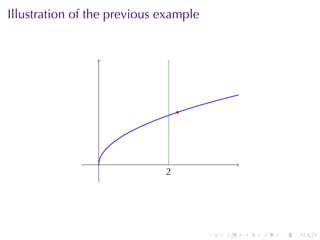
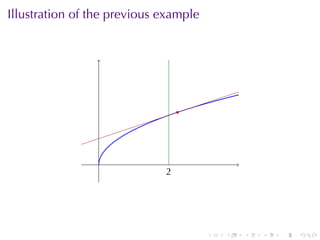
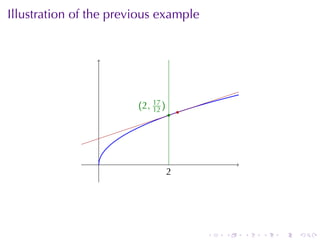
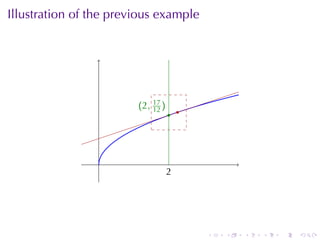
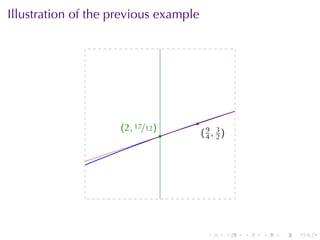
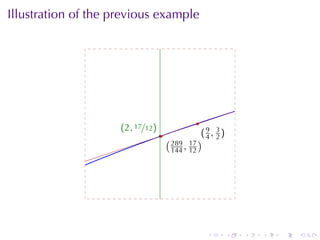
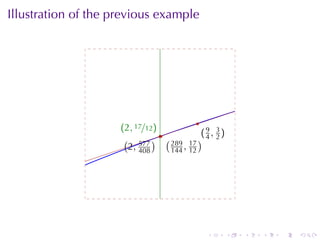
The document covers linear approximation and differentials as key concepts in calculus, specifically focusing on finding the linear function that best approximates a differentiable function near a specific point. It includes examples of using linear approximation to estimate values of functions such as sine and square root, along with applications in real-world scenarios like speed and manufacturing costs. The document emphasizes that the tangent line serves as the primary tool for these approximations.