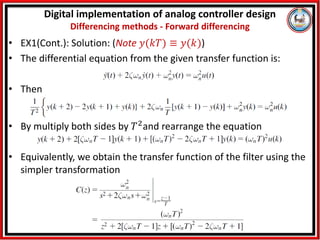
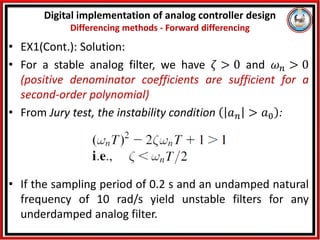
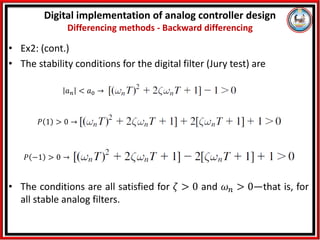
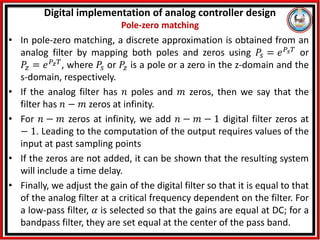
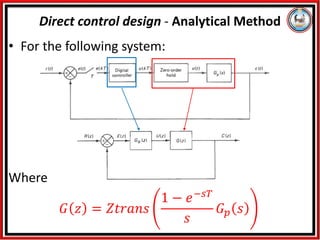
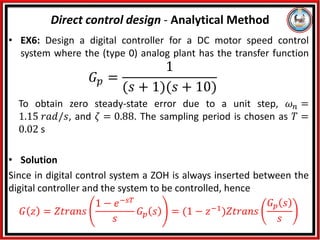
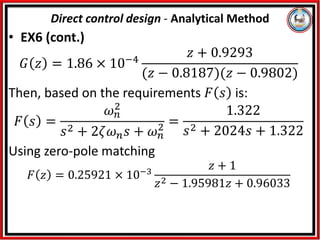
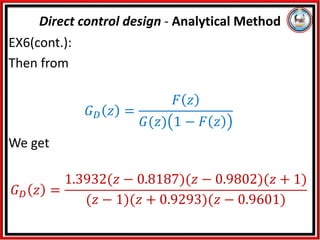
The document presents an analytical method for the digital implementation of analog controllers, focusing on designing and transforming controllers between analog and digital domains. It outlines procedures for mapping analog controllers to digital equivalents, ensuring stability, and adhering to design specifications through various techniques, including forward differencing and pole-zero matching. Additionally, it includes examples and conditions for ensuring physical realizability and steady-state accuracy in control design.