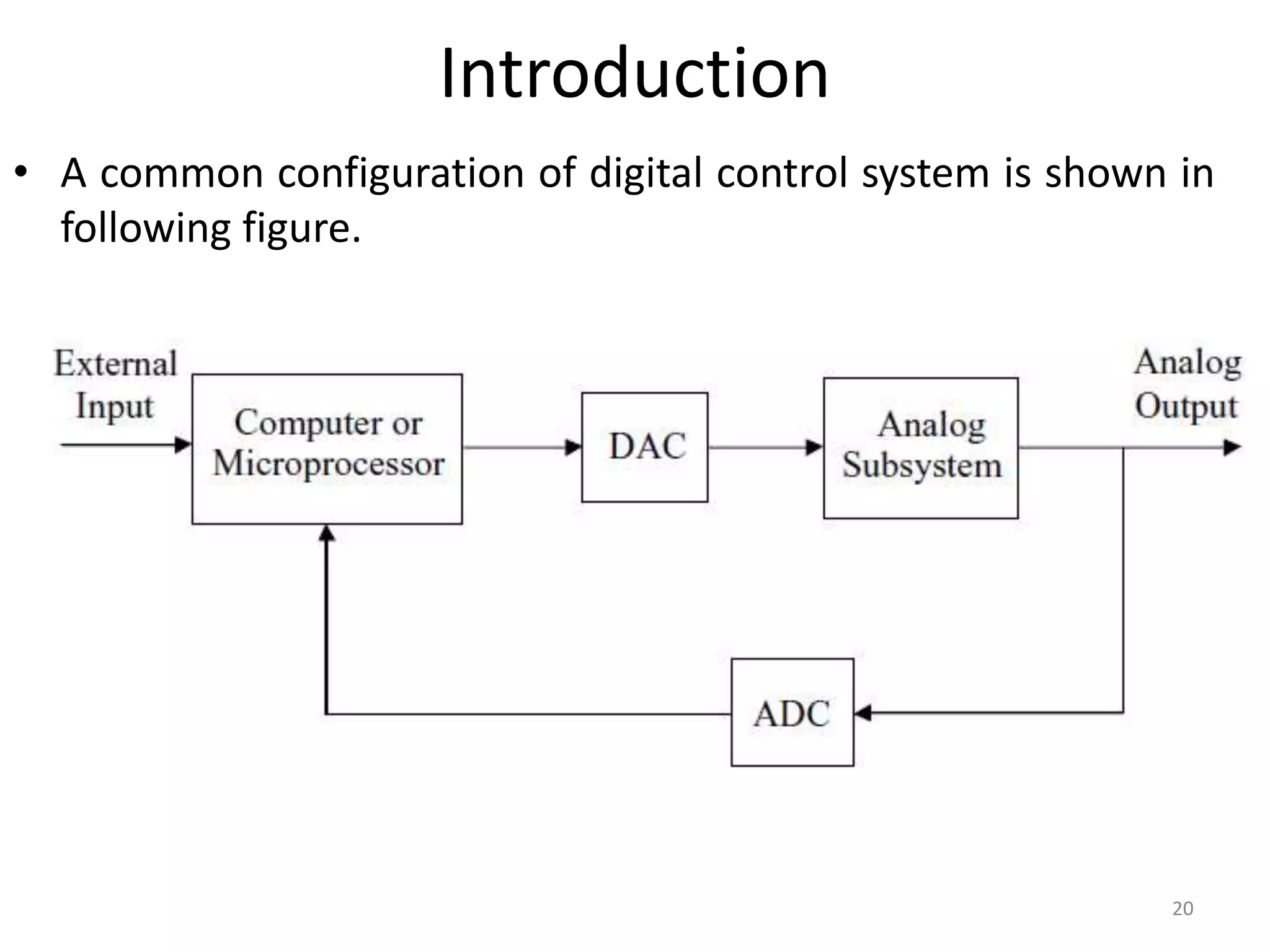
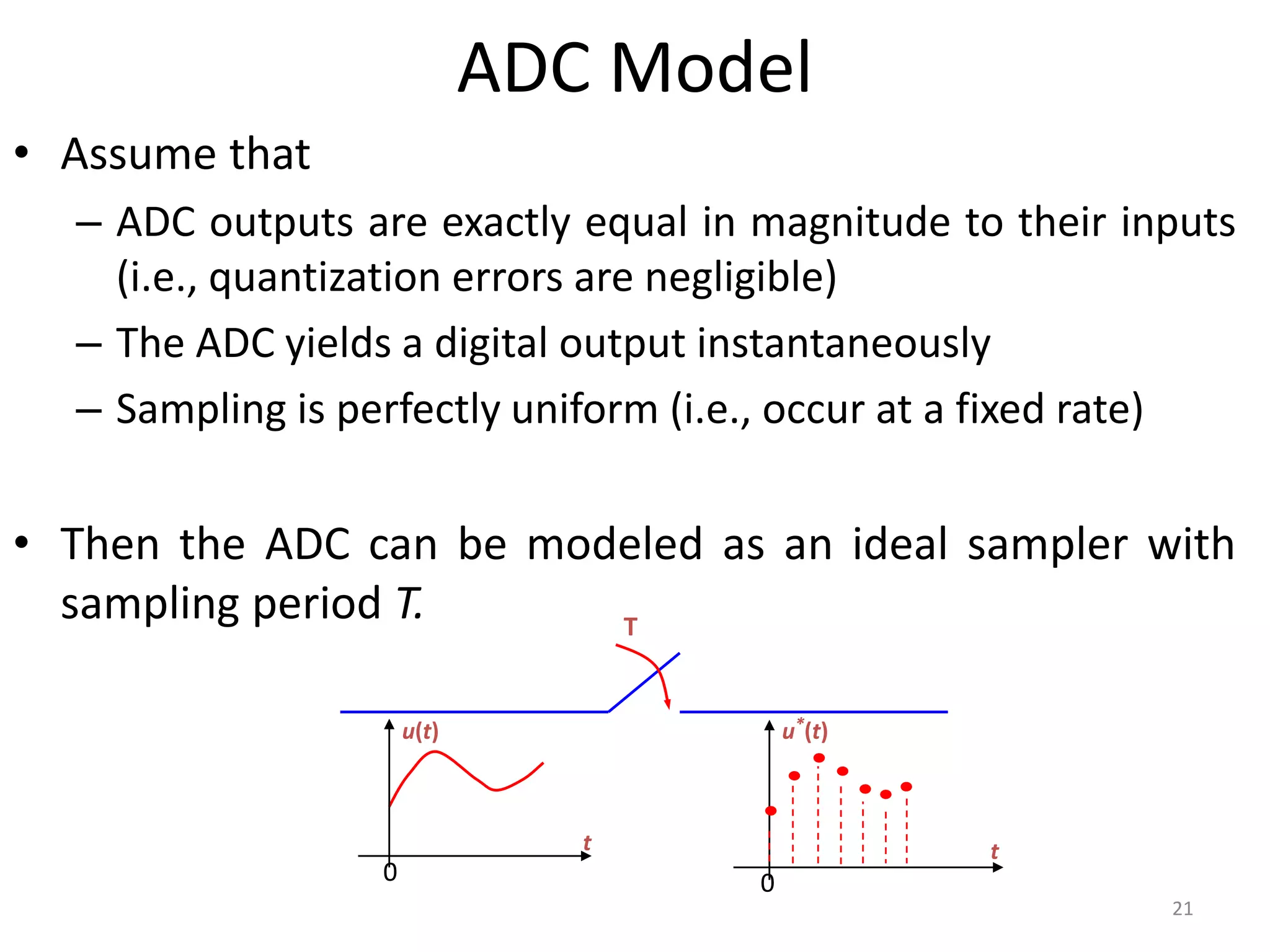
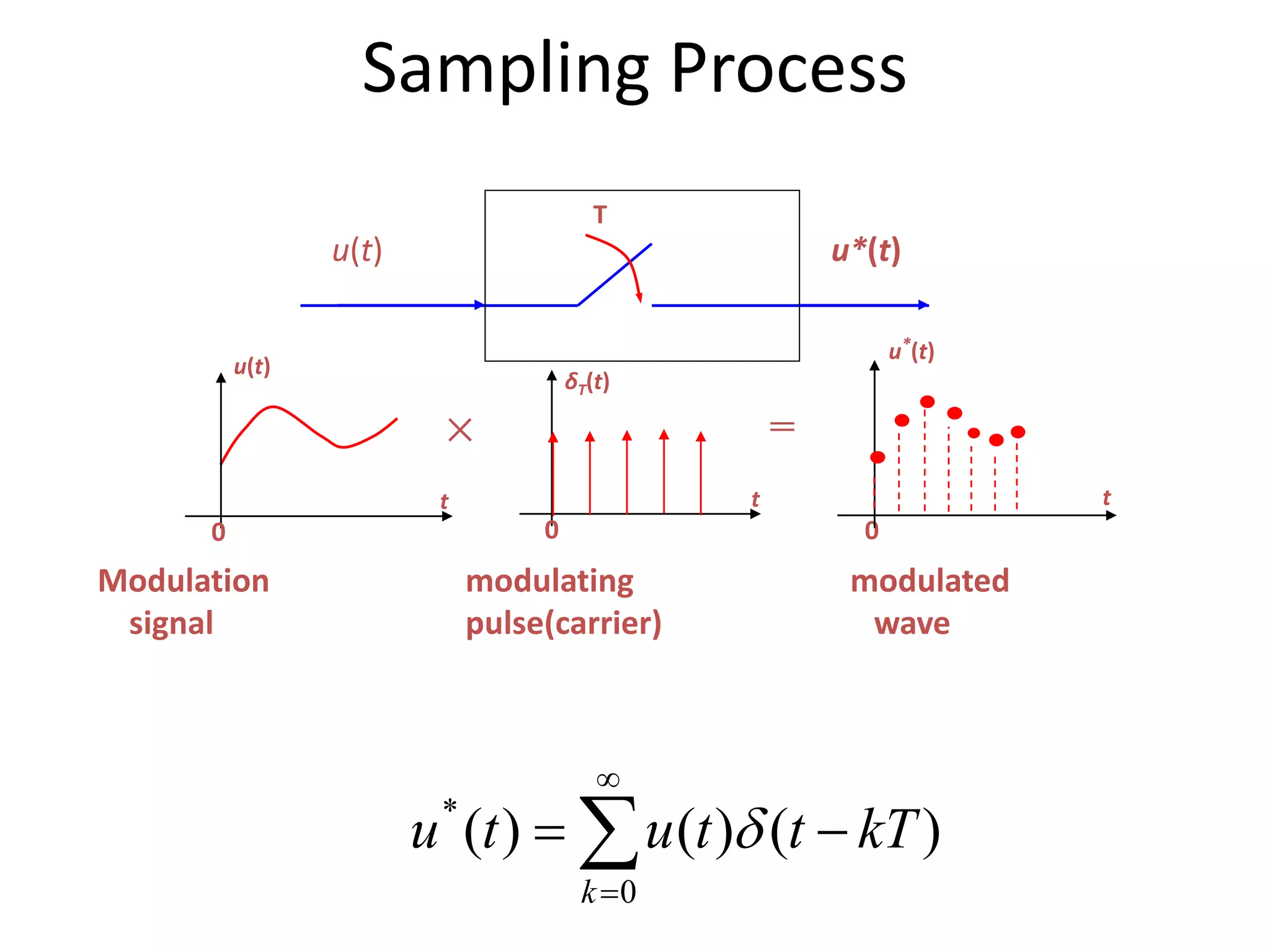
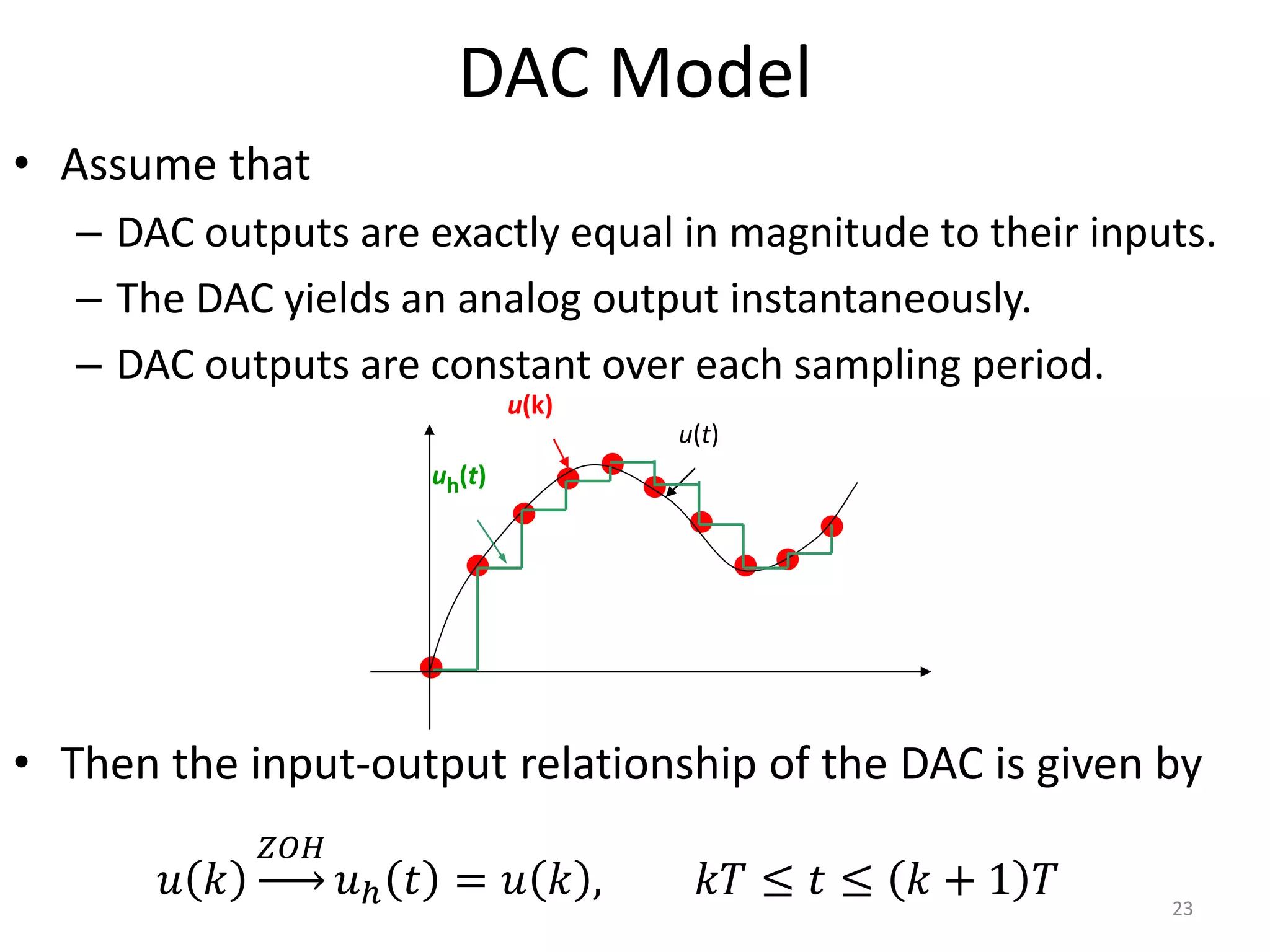
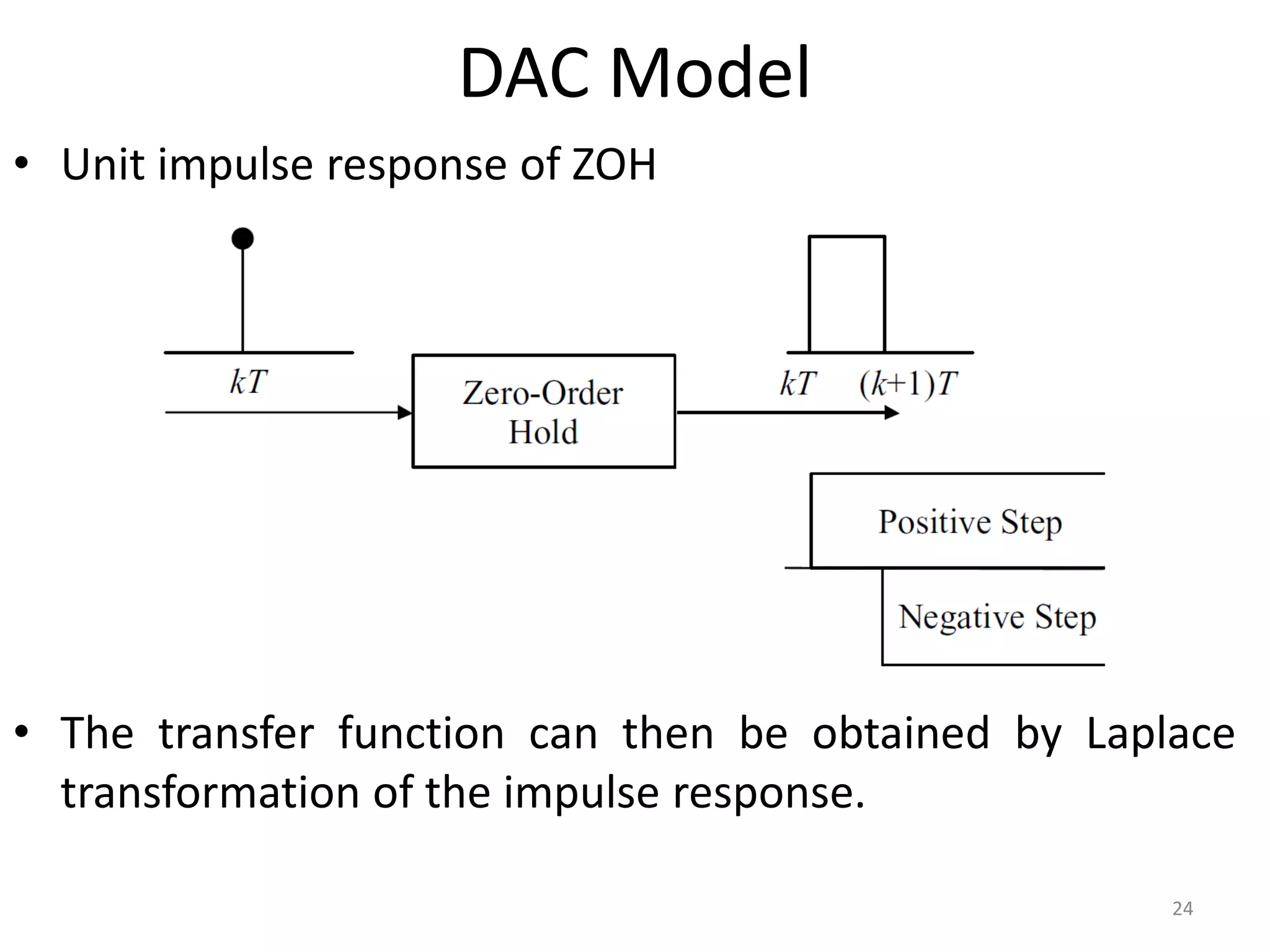
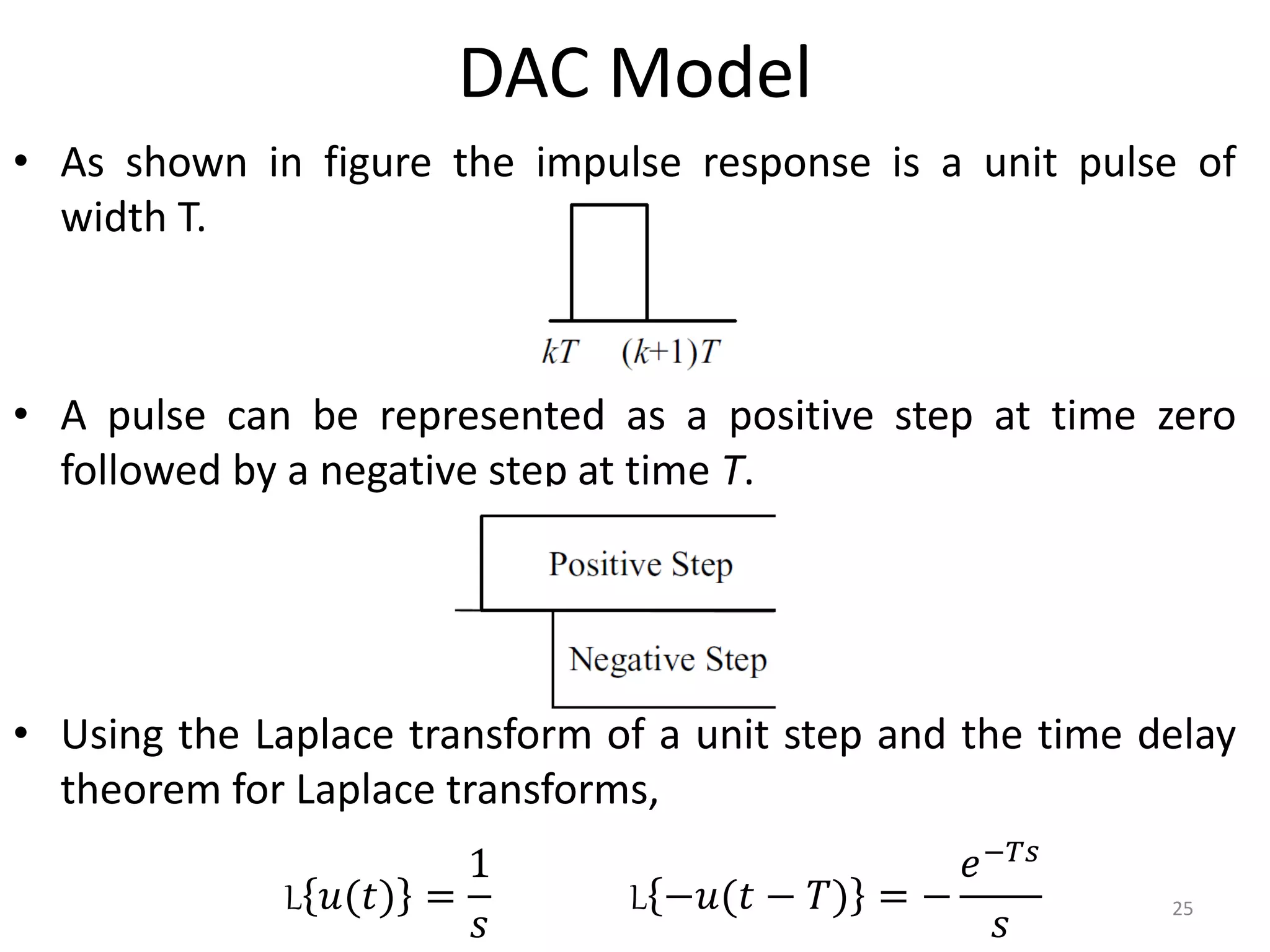
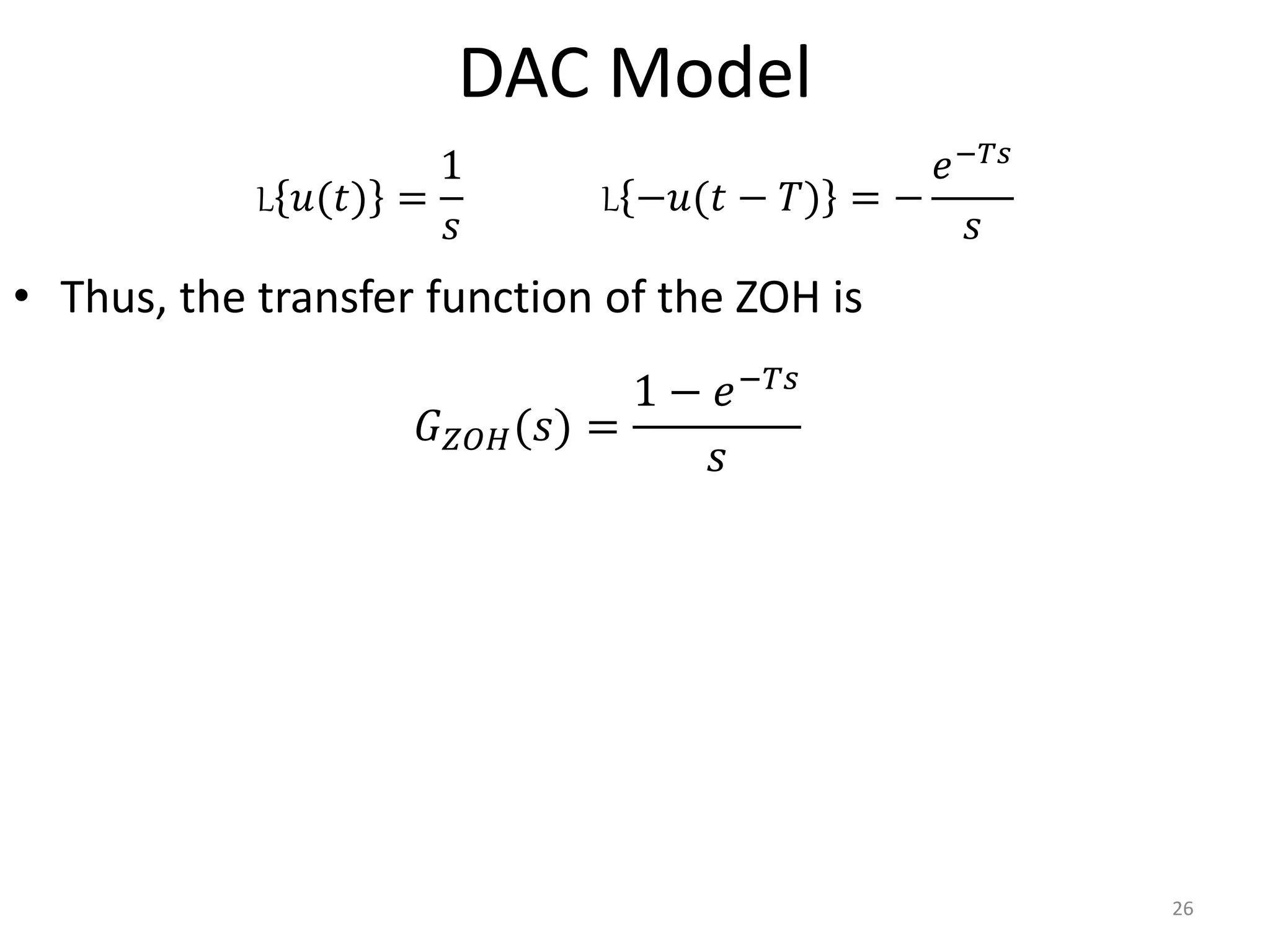
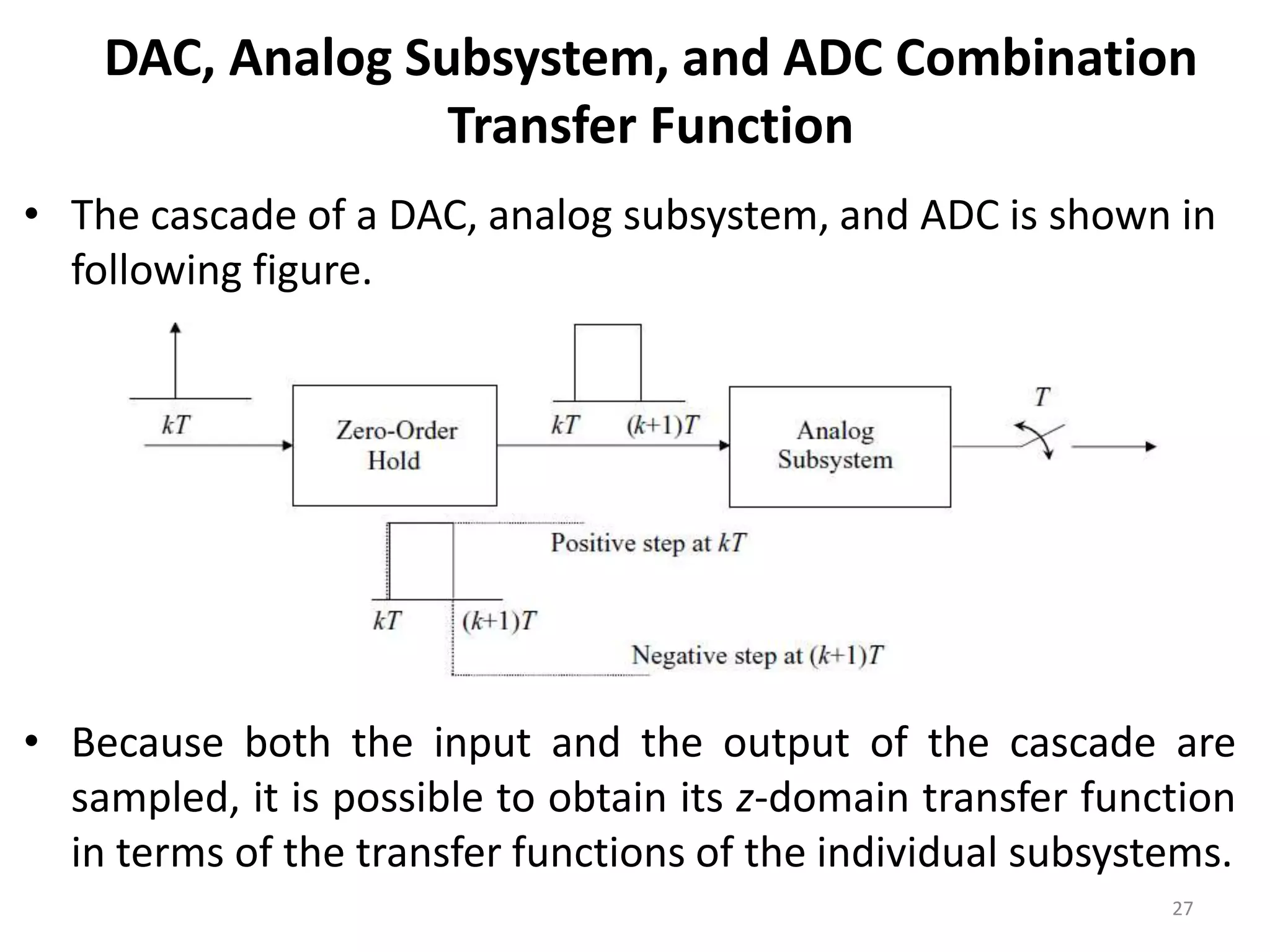
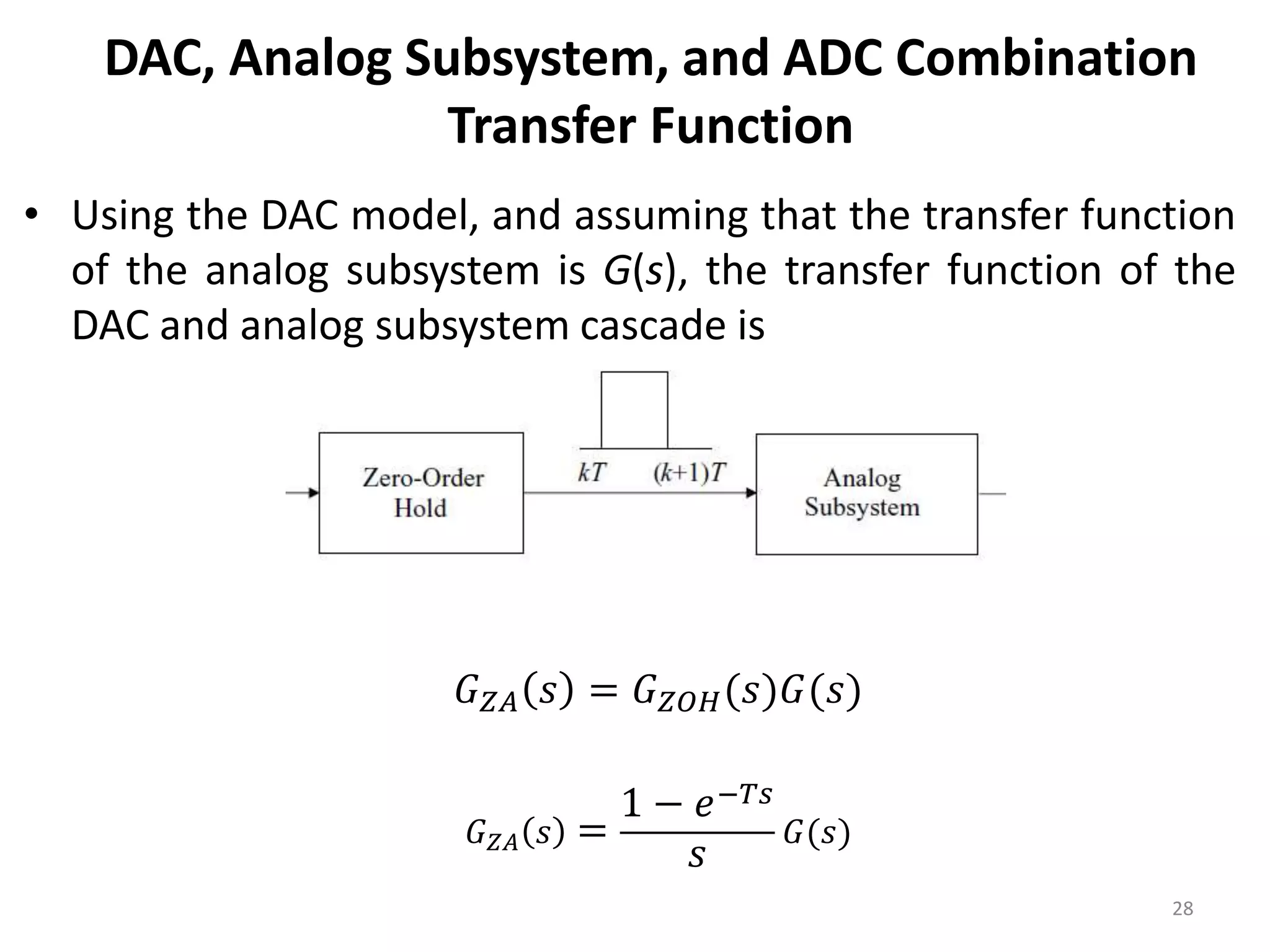
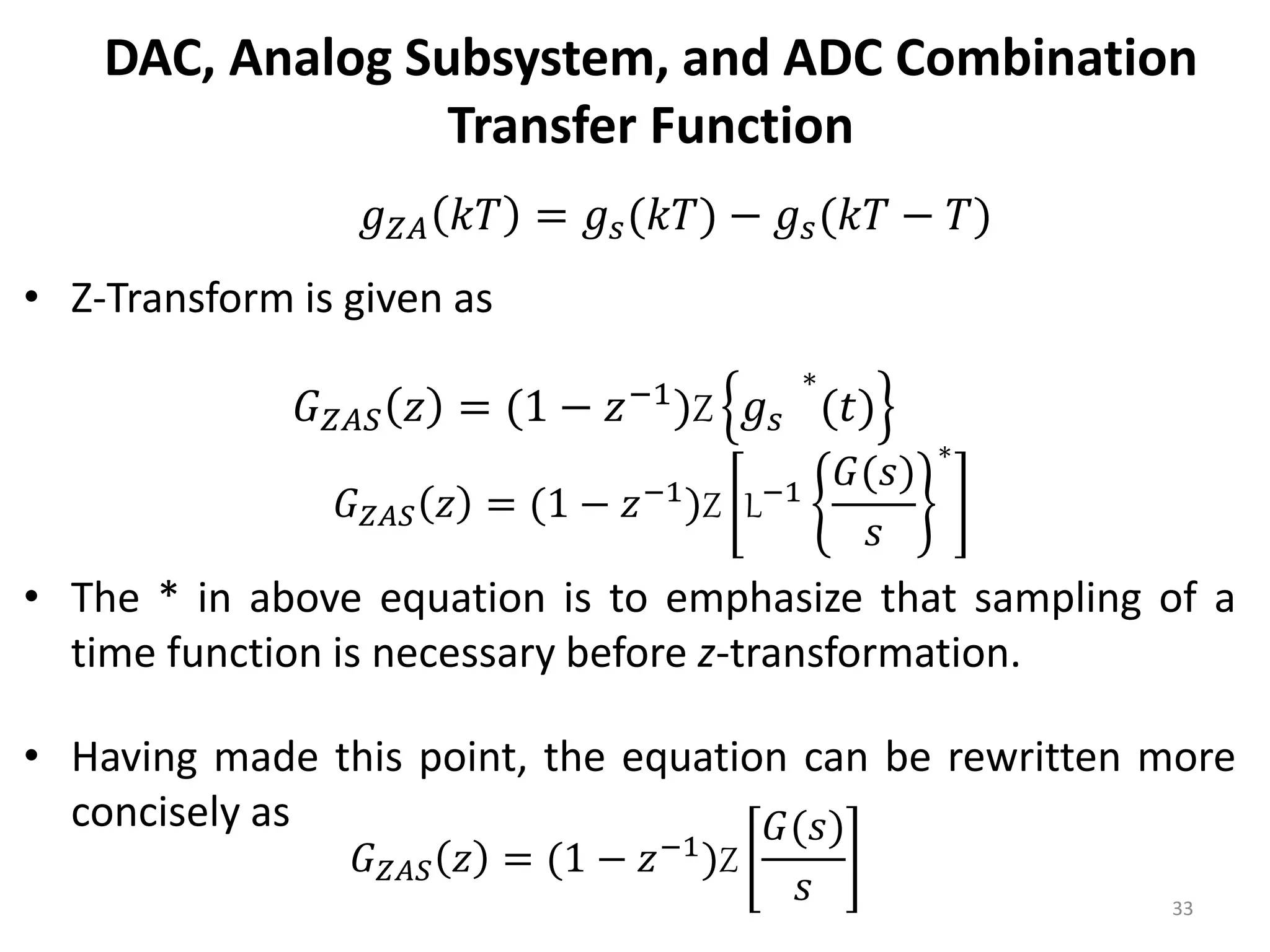
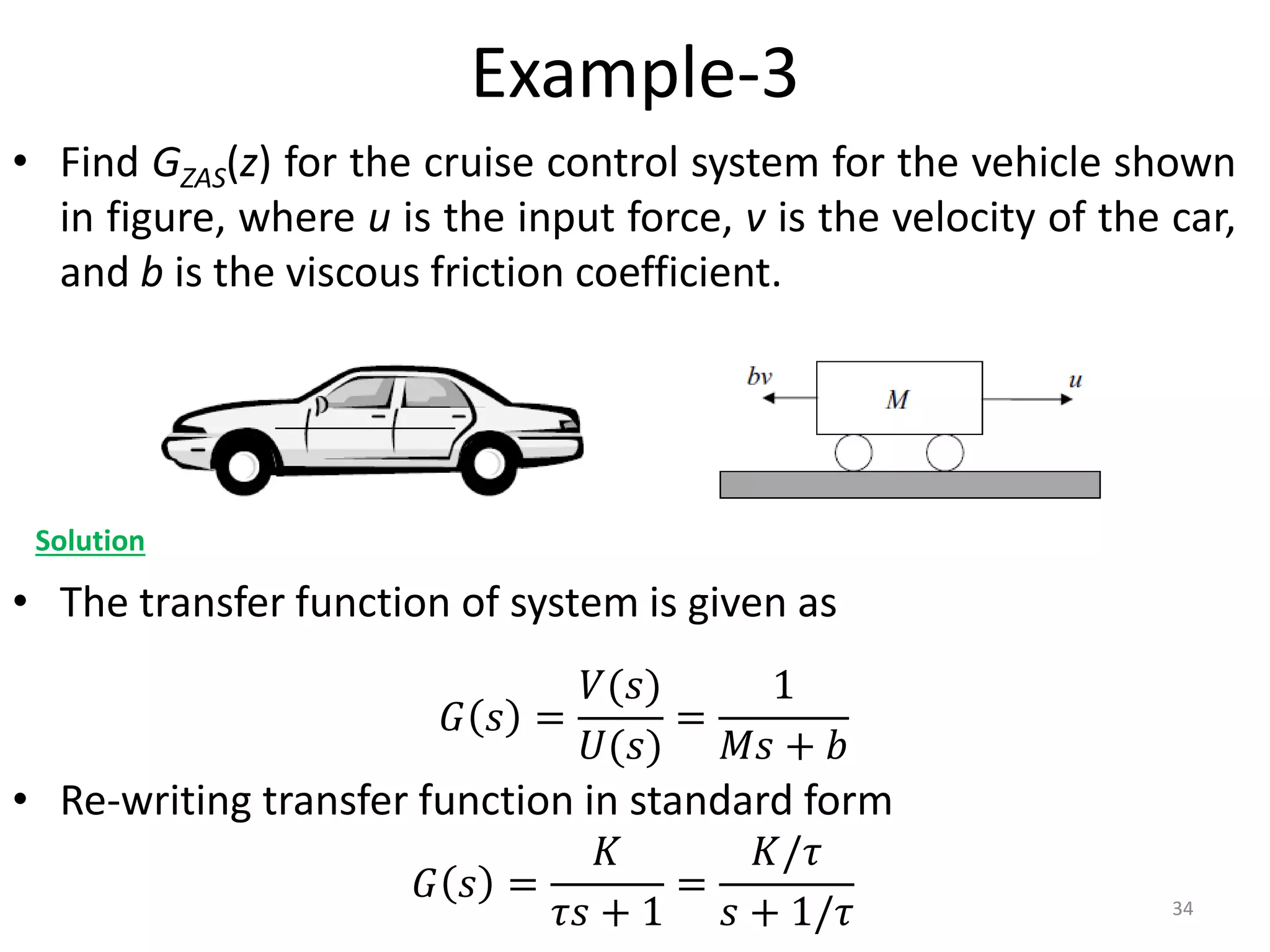
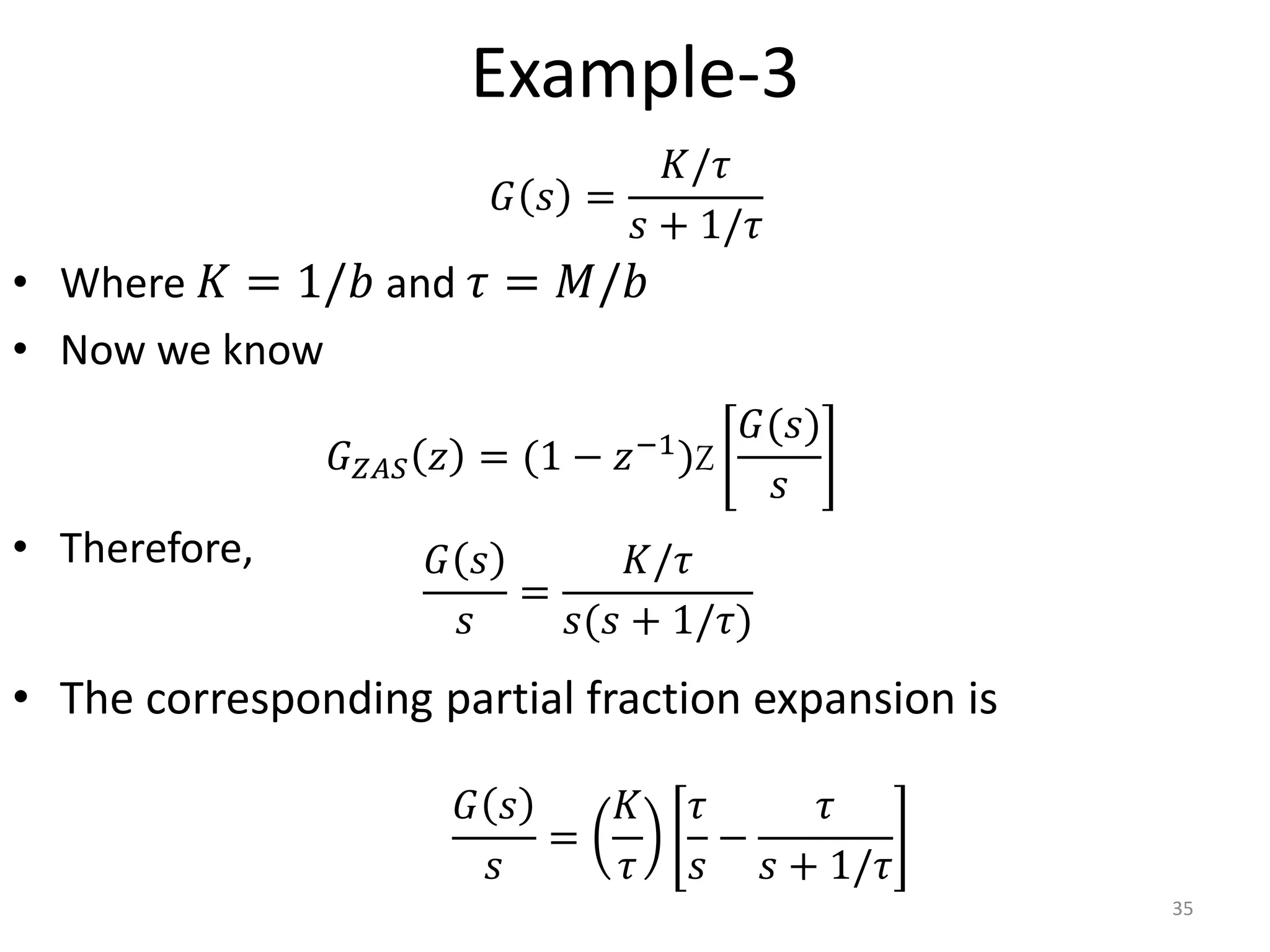
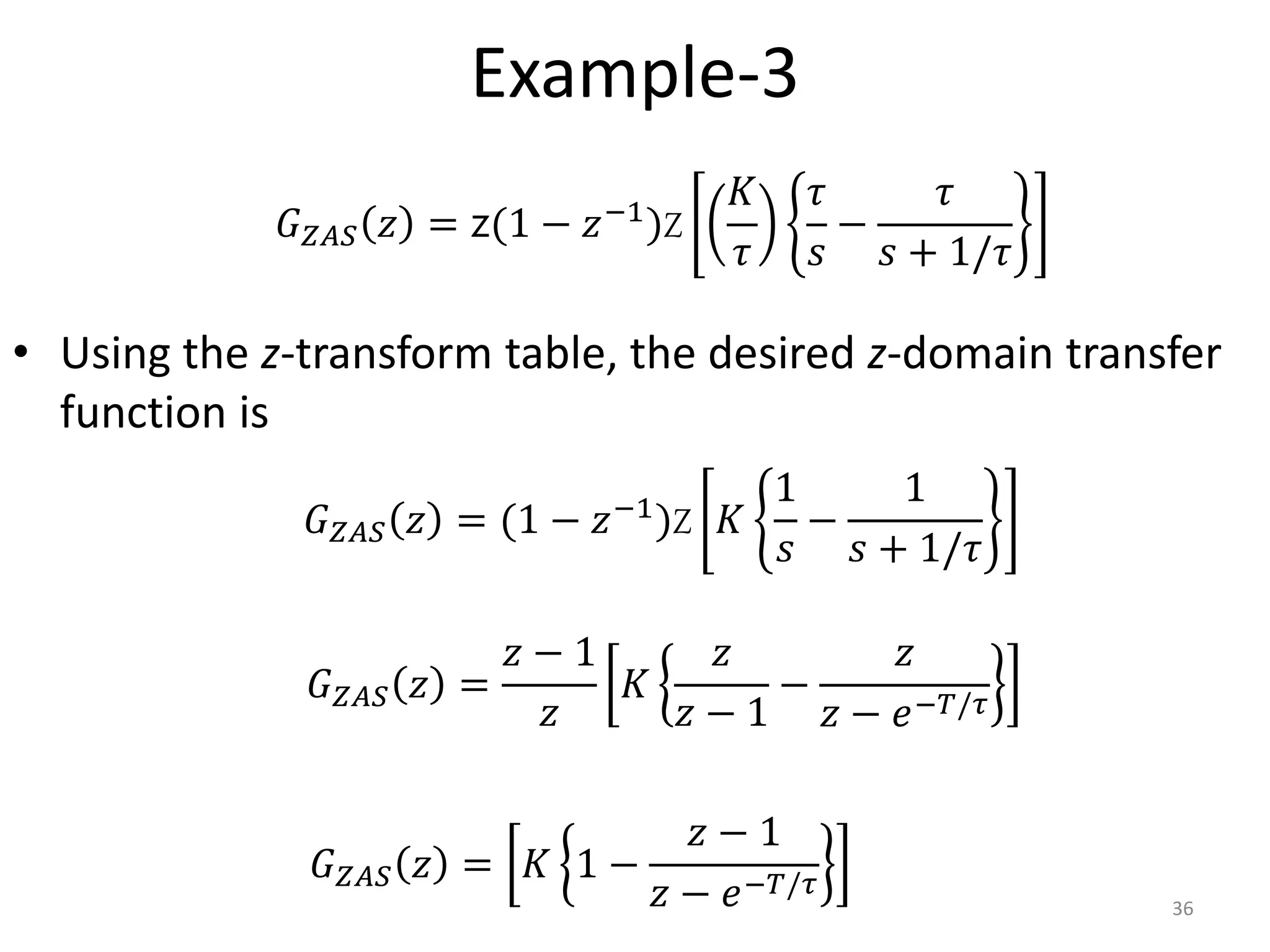
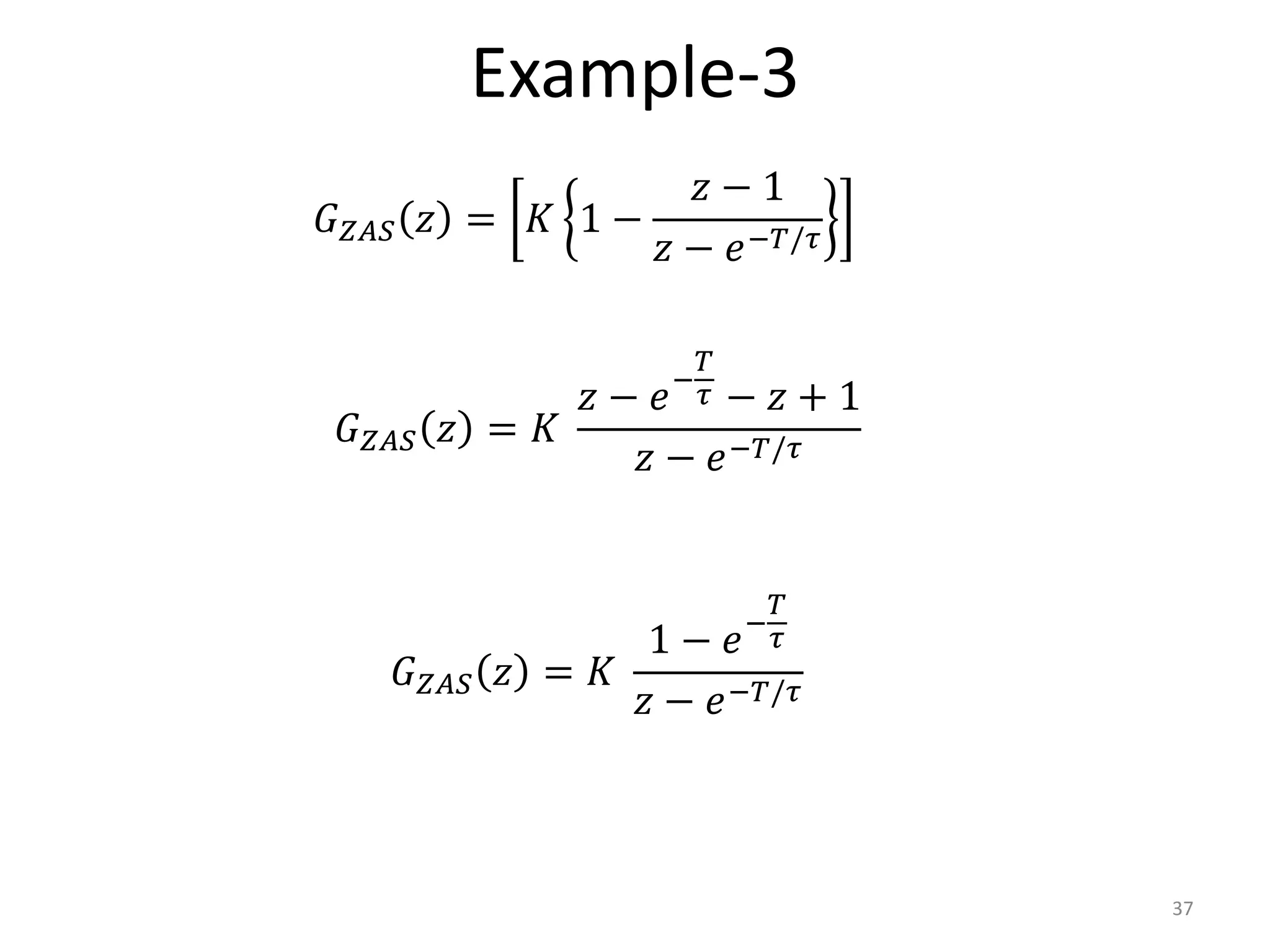
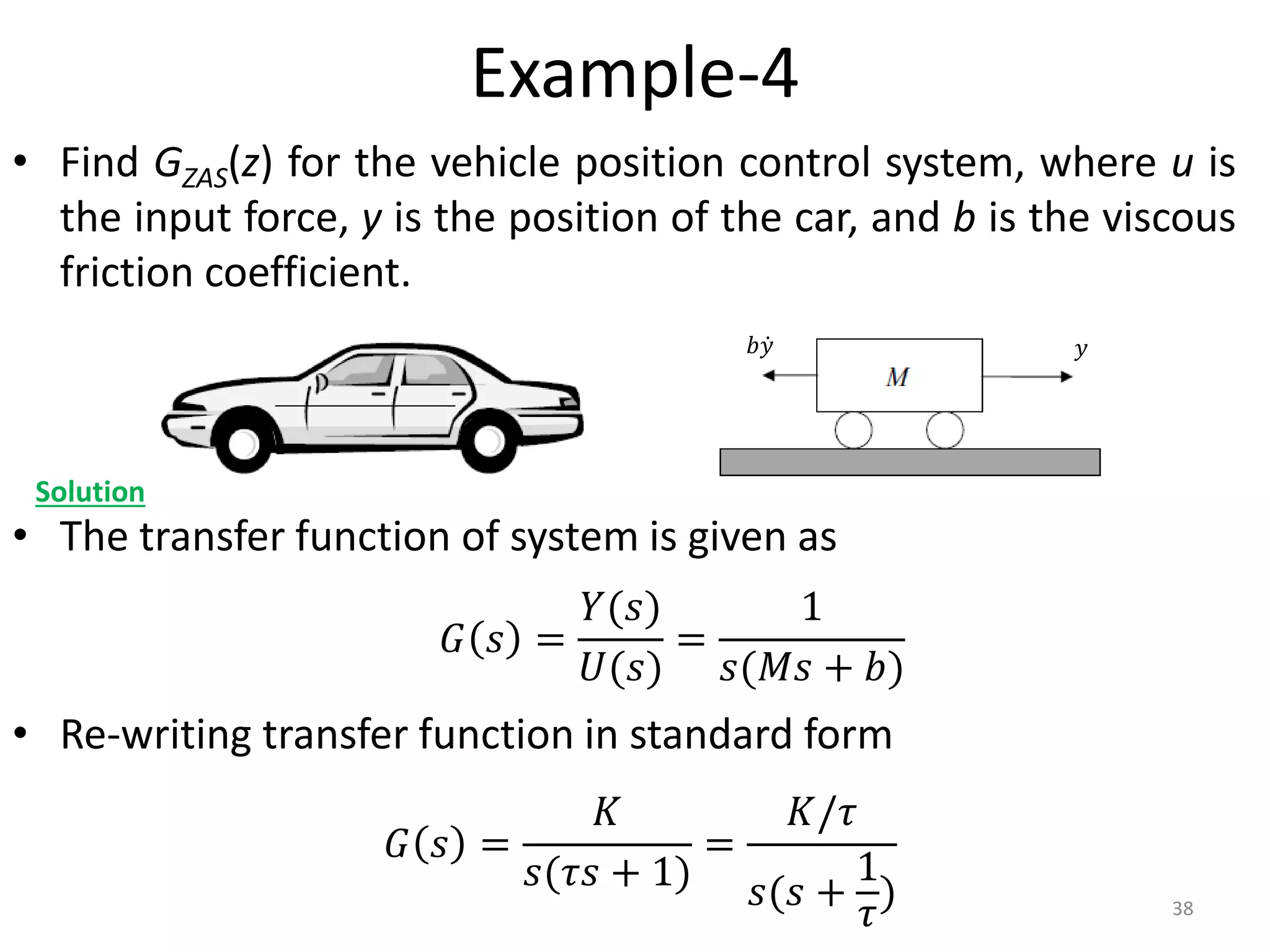
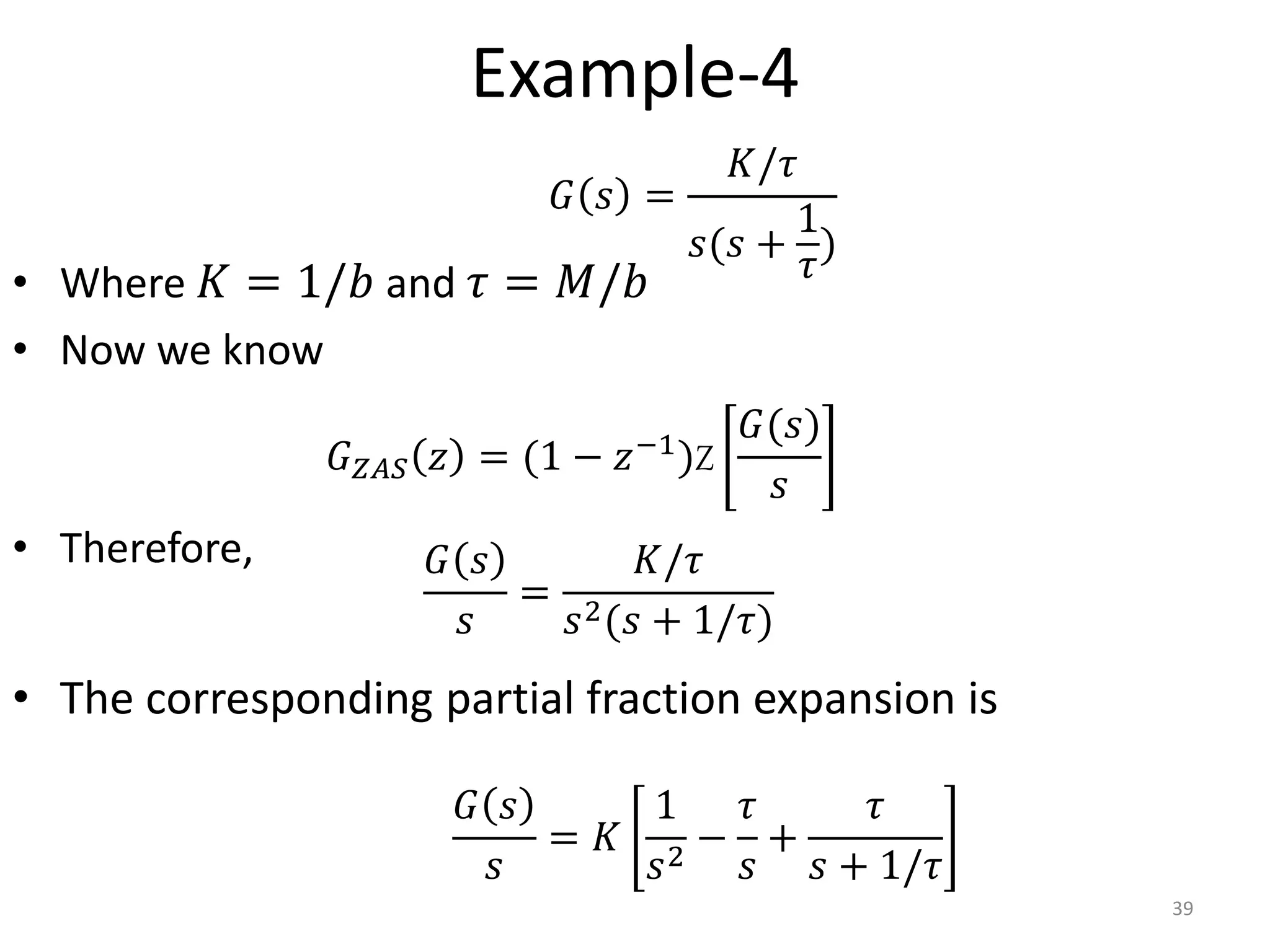
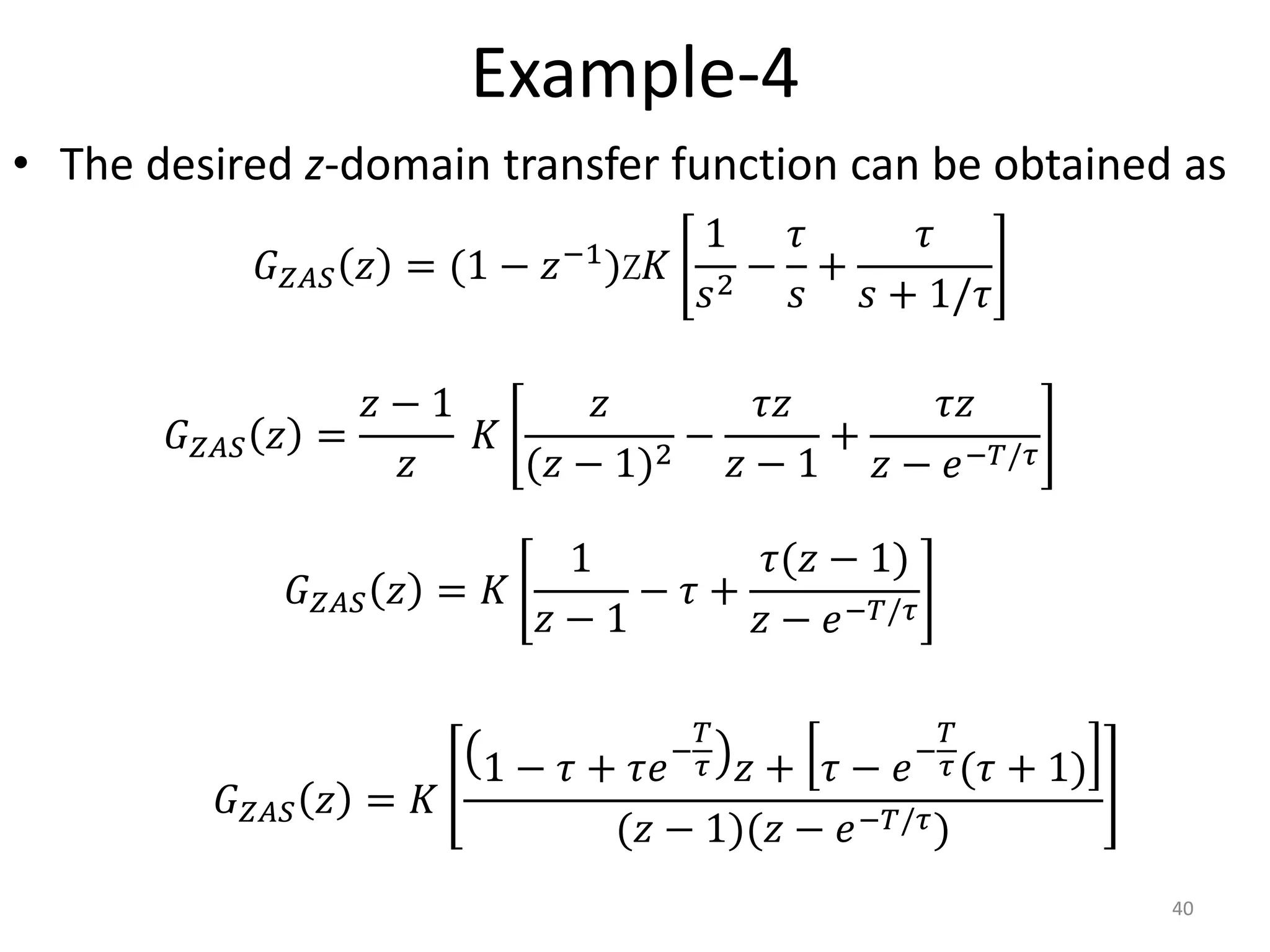
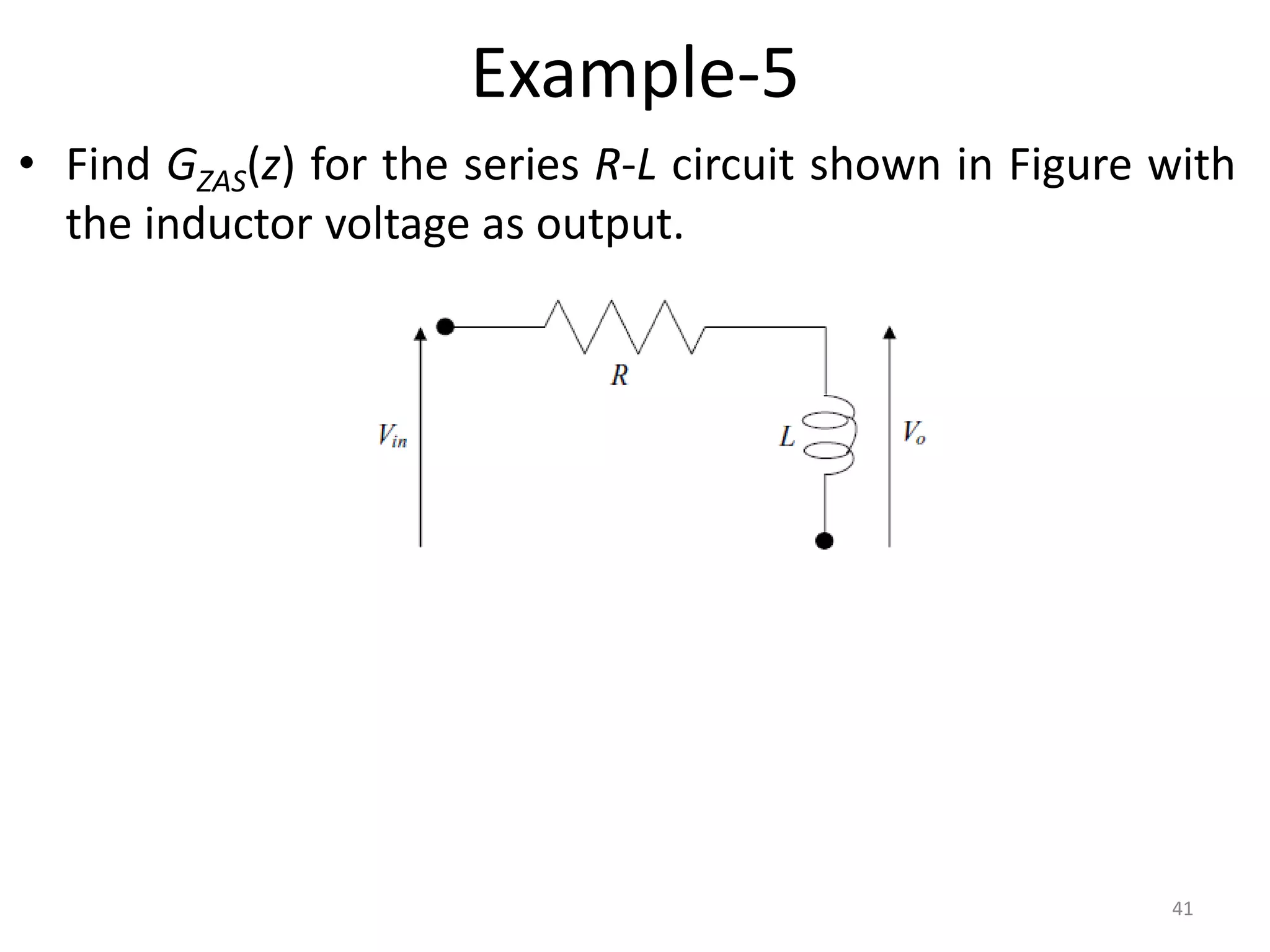
This document provides a lecture summary on modeling digital control systems. It discusses the sampling theorem, analog-to-digital converter (ADC) and digital-to-analog converter (DAC) models, and how to combine these models. The sampling theorem establishes the minimum sampling rate needed to reconstruct a band-limited signal. The ADC and DAC are modeled as an ideal sampler and zero-order hold, respectively. Their combination transfer function is derived as (1 - z-1) times the z-transform of the analog subsystem transfer function divided by s. Examples are provided to illustrate selecting suitable sampling rates and deriving combined digital system transfer functions.








































![Digital Signal Processing[ECEG-3171]-Ch1_L06](https://cdn.slidesharecdn.com/ss_thumbnails/dspl6ch2-180427094424-thumbnail.jpg?width=640&height=640&fit=bounds)


























