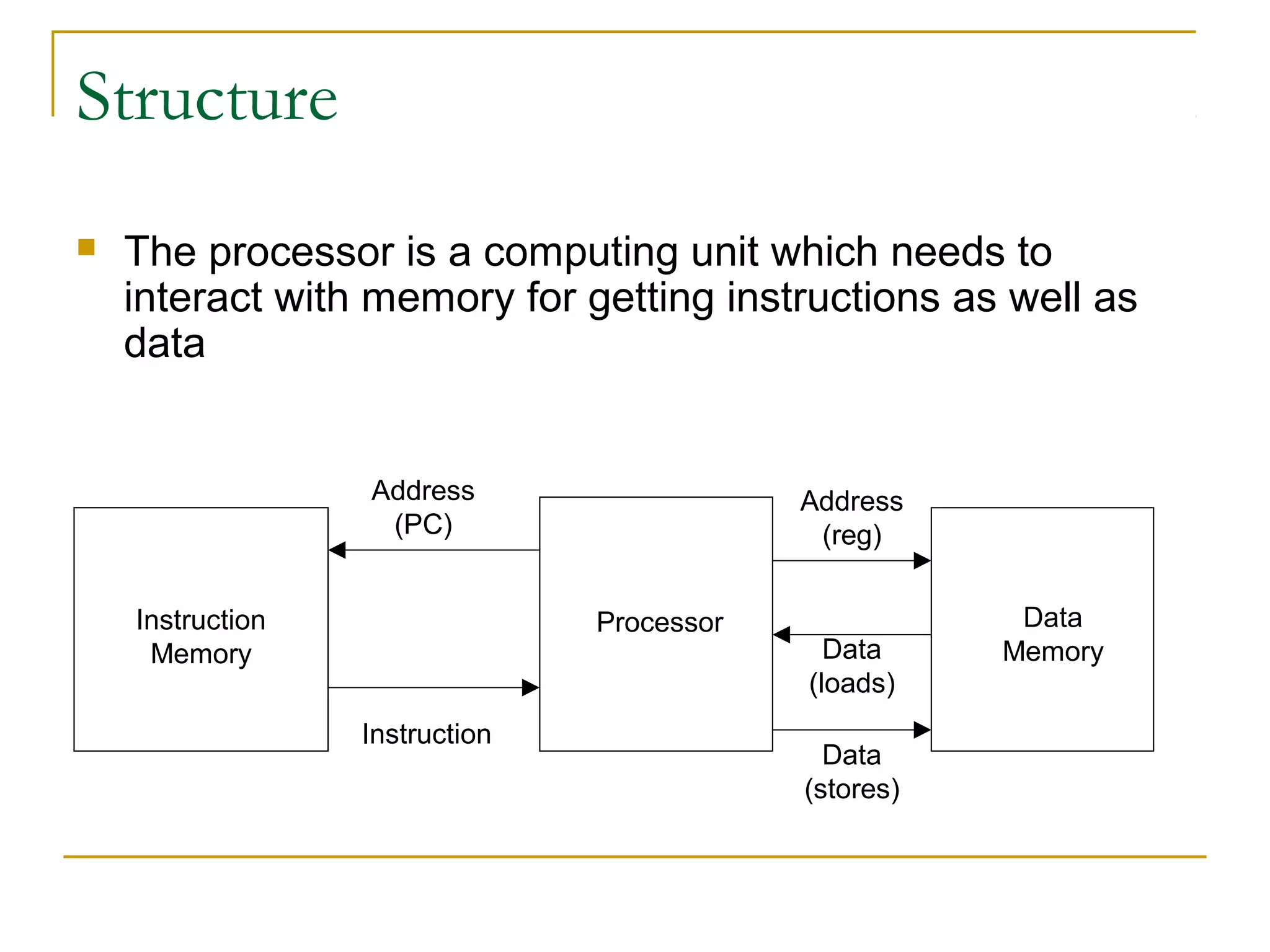
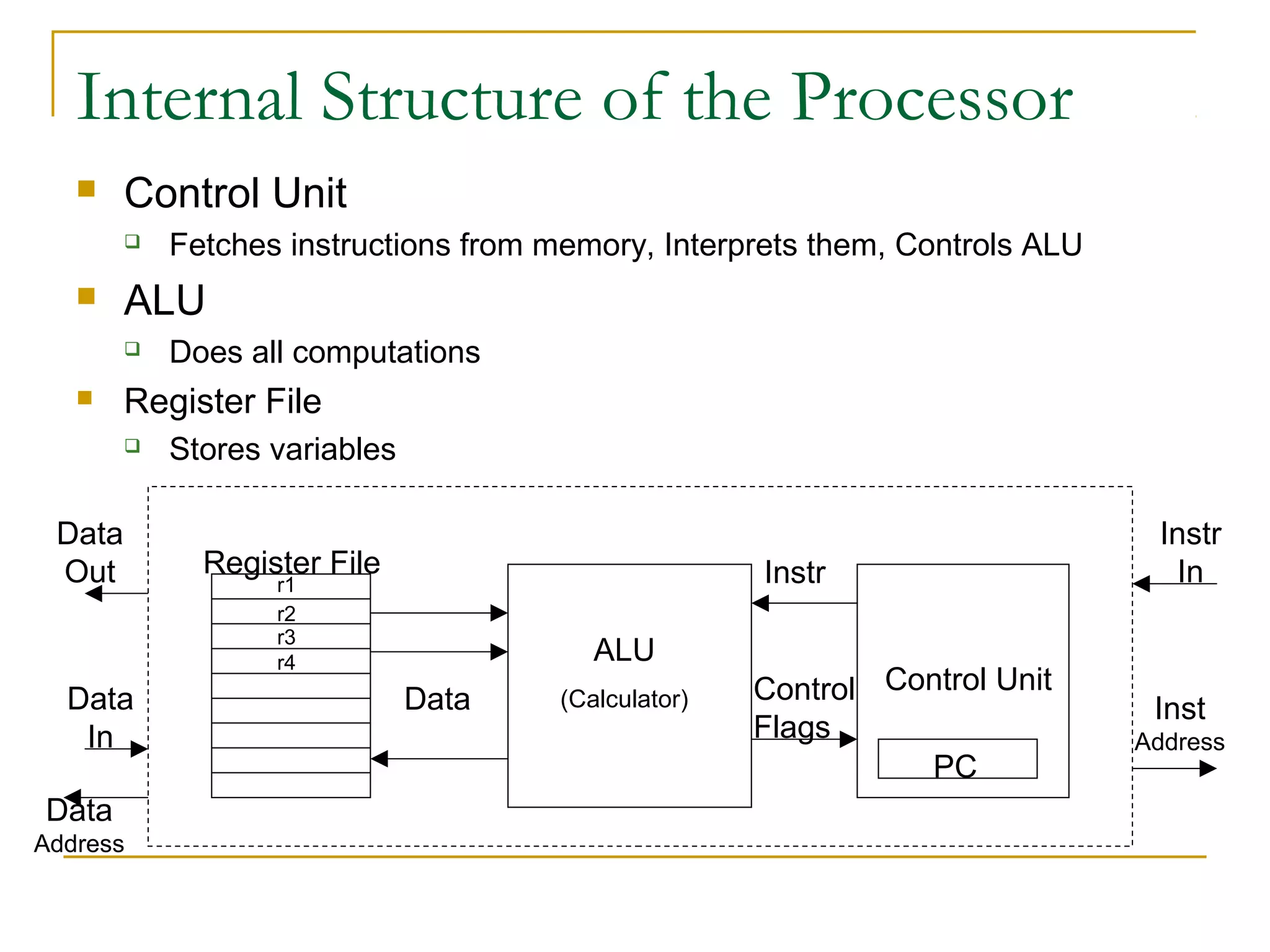
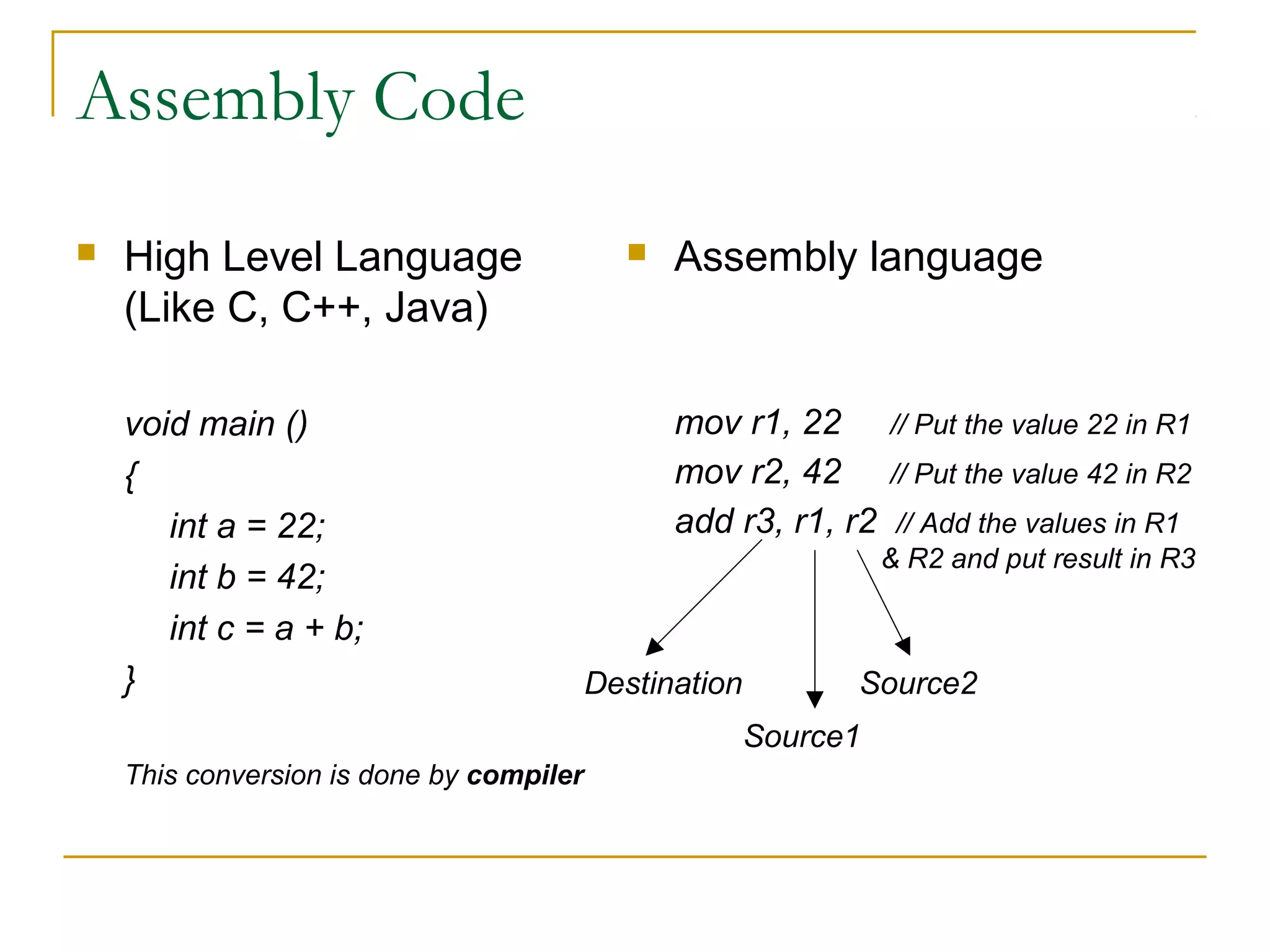
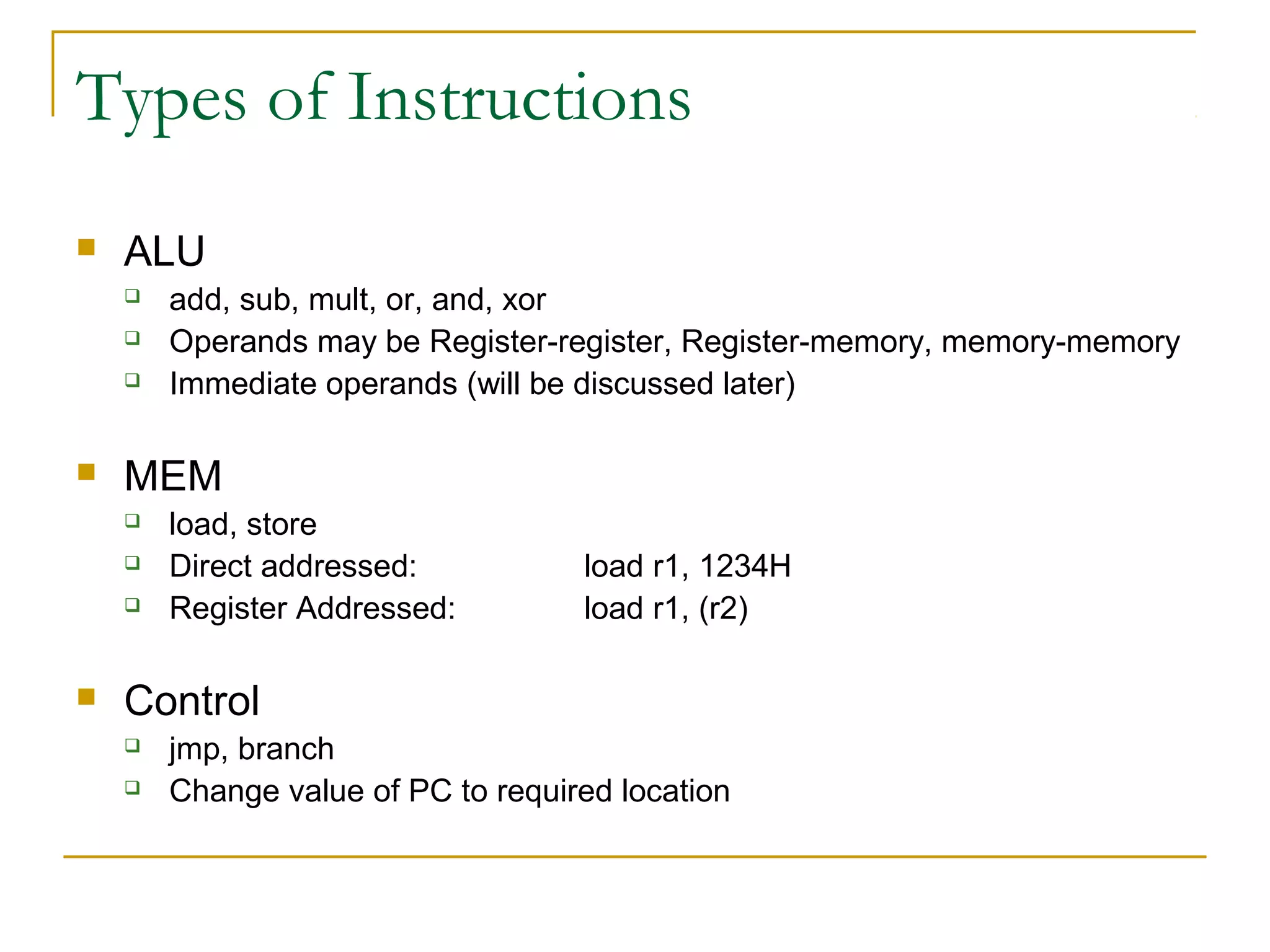
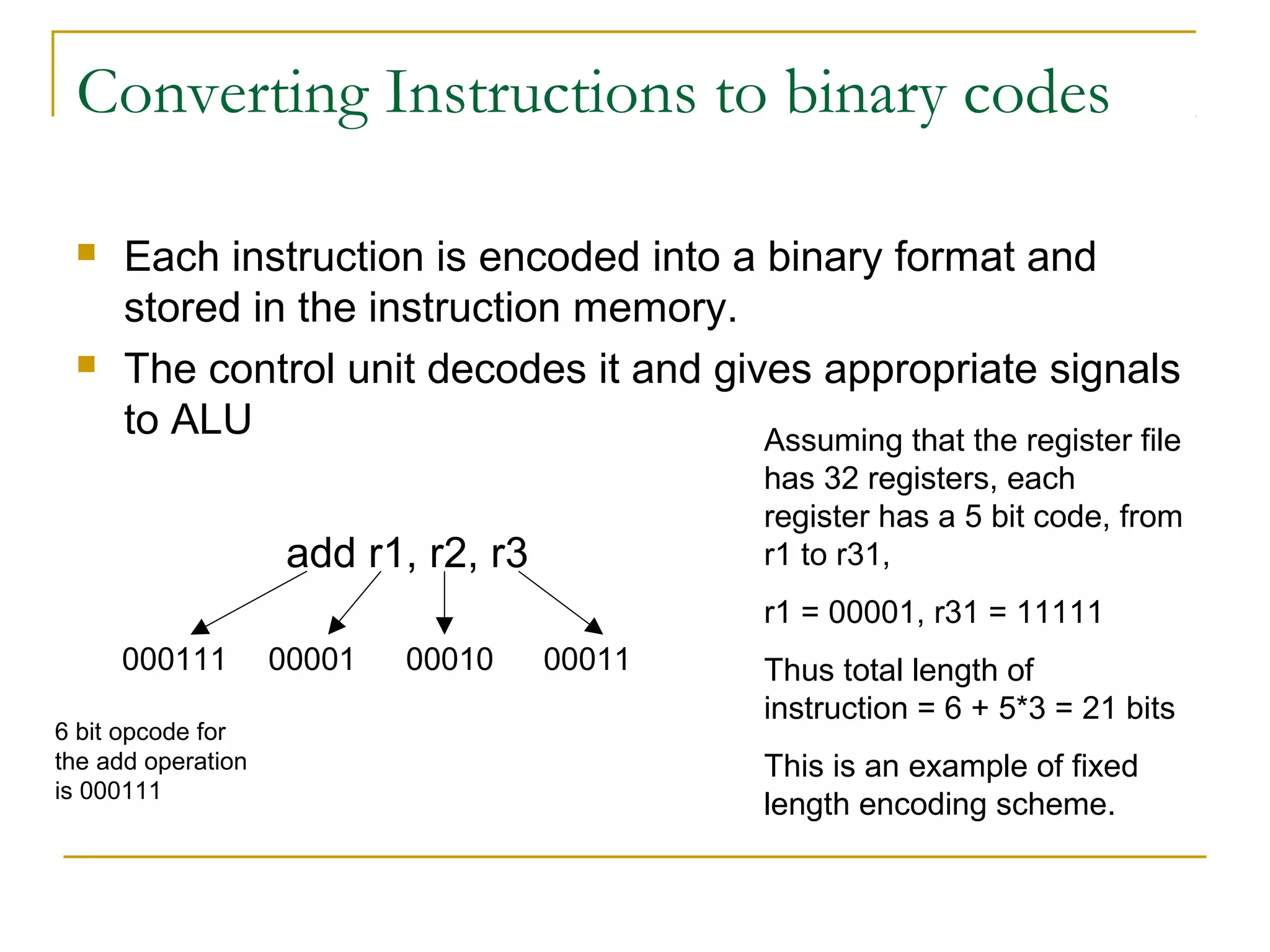
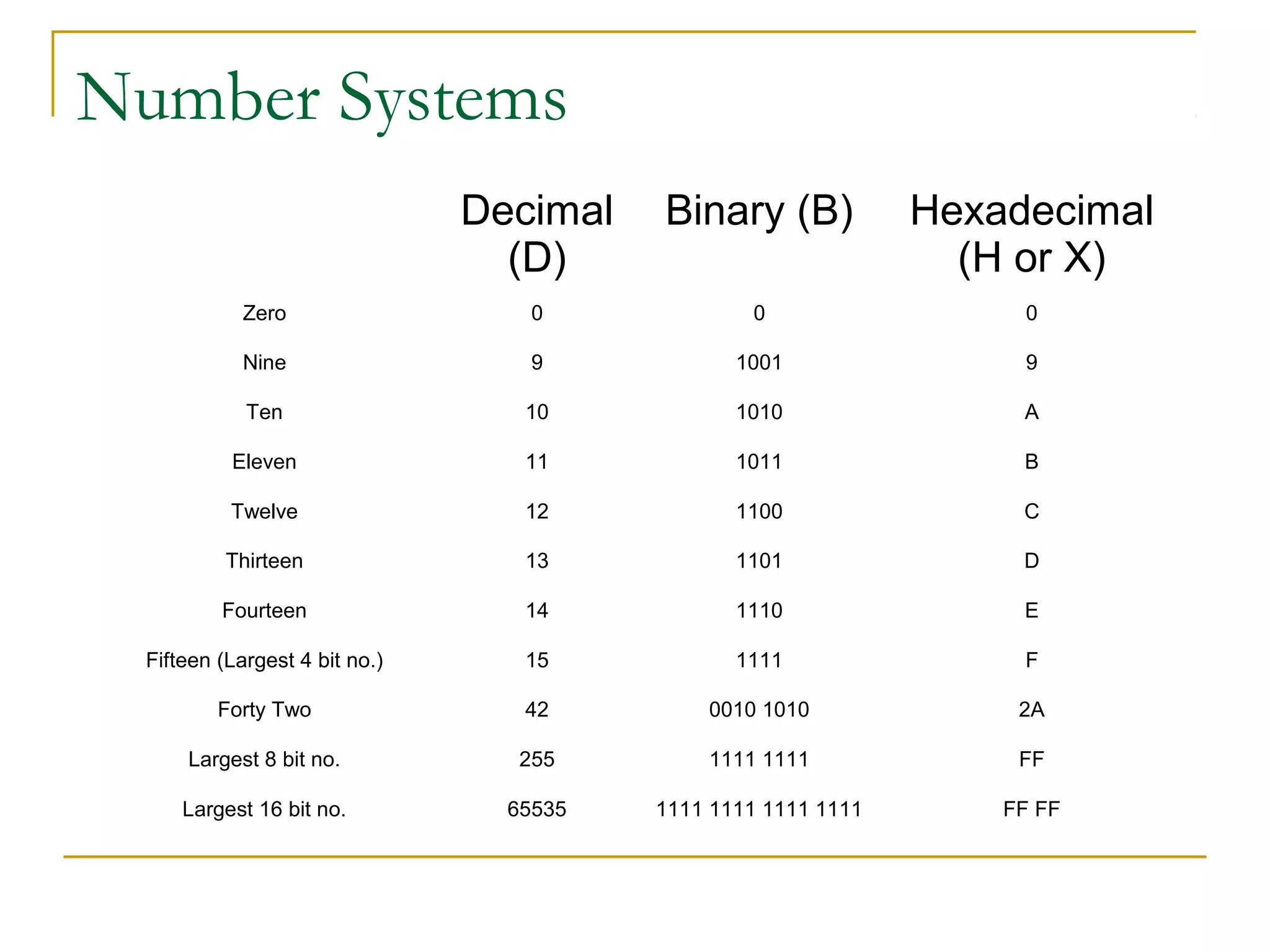
This document provides an overview of computer architecture and microprocessors. It describes what a microprocessor is, its key design objectives of maximizing performance and productivity within constraints like power and area. It outlines the internal structure of a processor including the control unit, ALU, and register file. The document also discusses instruction set architecture, assembly code, types of instructions, encoding instructions into binary, and different number systems used.