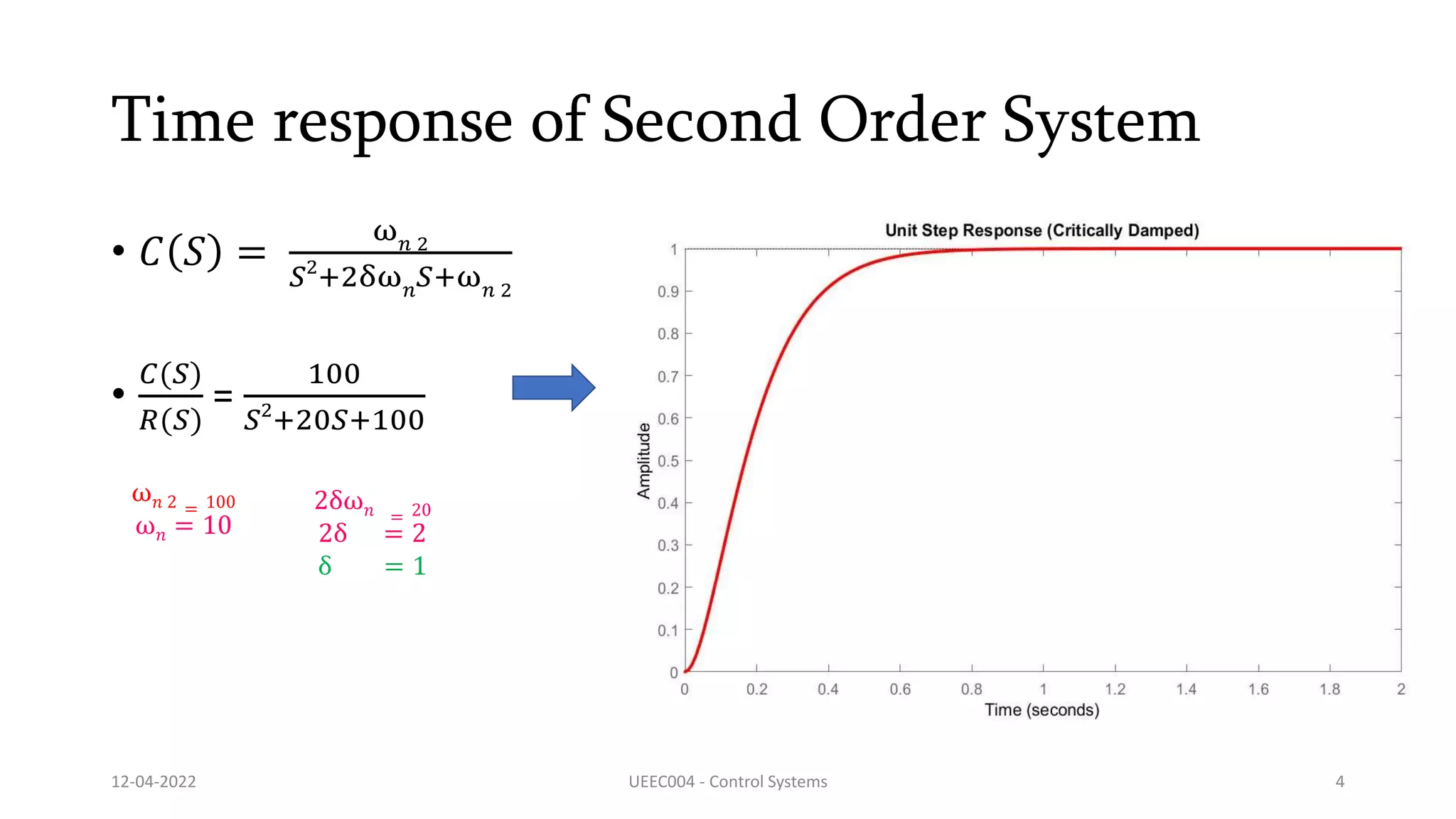
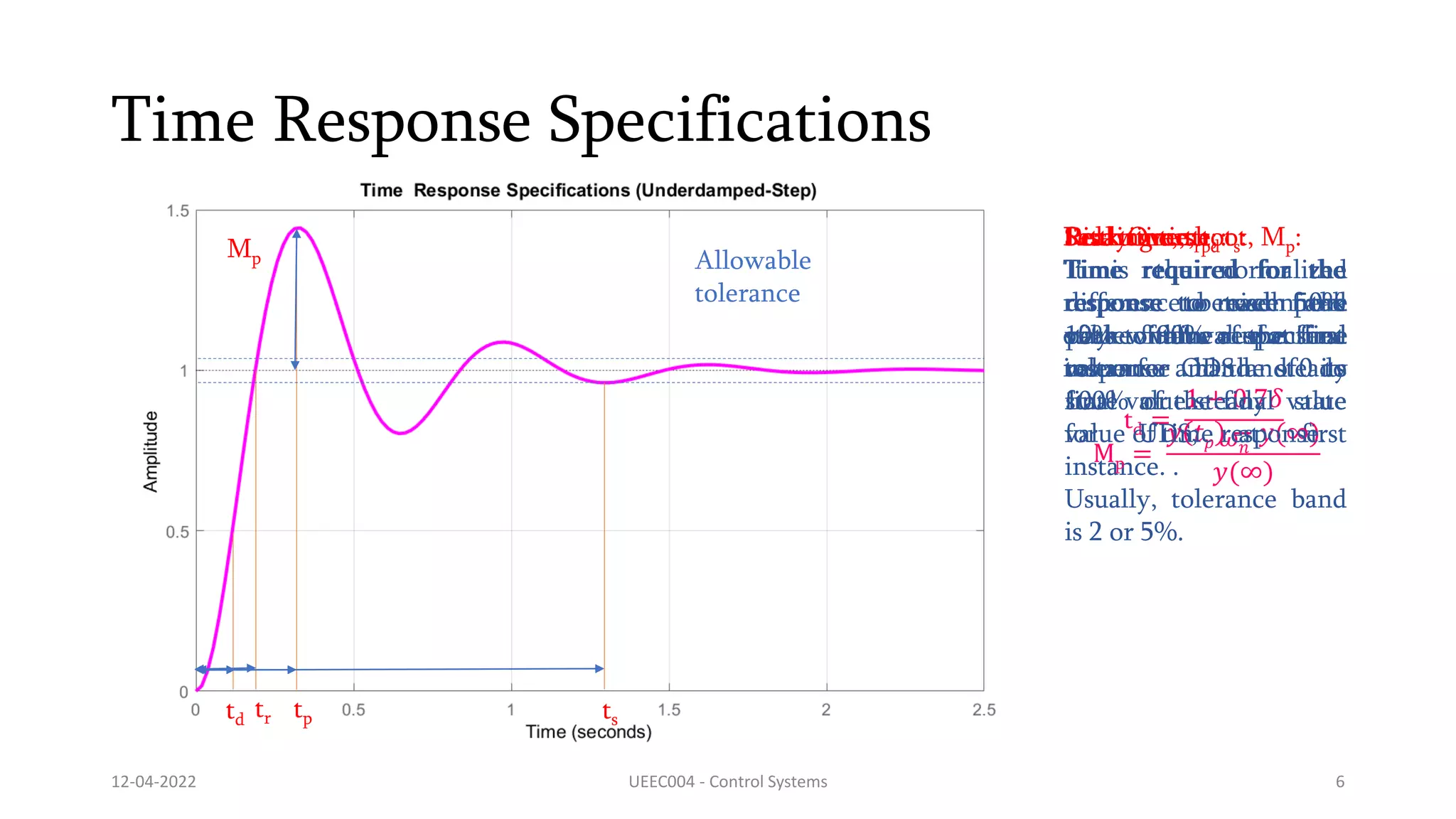
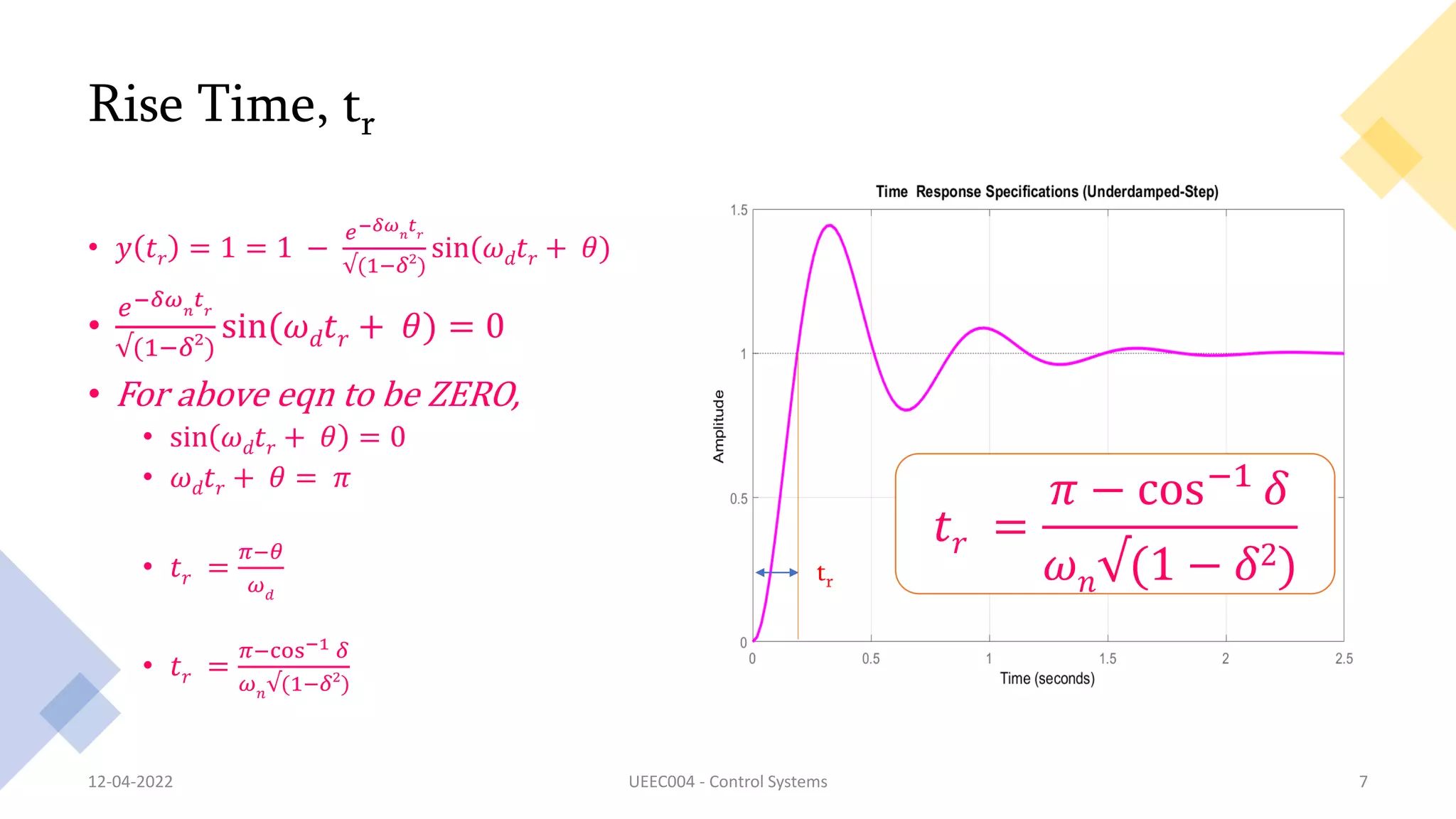
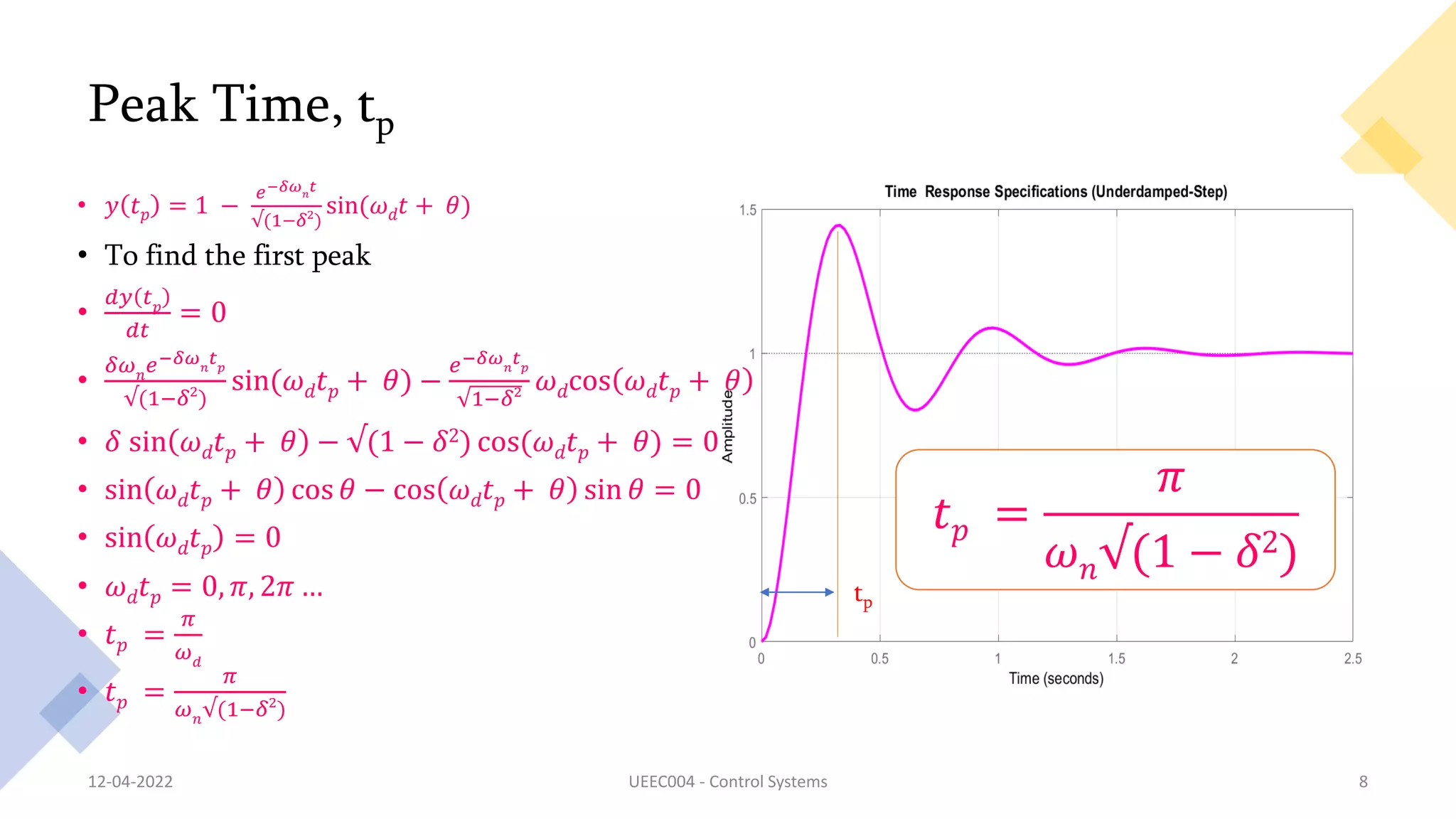
This document discusses time response specifications for second order systems, including delay time, rise time, peak time, and peak overshoot. It provides equations to calculate each specification based on the natural frequency (ωn) and damping ratio (δ) of the system. Rise time is defined as the time to rise from 10-90% of the final value and is calculated as (π - cos^-1δ)/ωn√(1-δ^2). Peak time is the time to reach the first peak and is calculated as π/ωn√(1-δ^2). Peak overshoot is calculated as 100e^(-δπ)/√(1-δ^2)