The document discusses input-output (I/O) interfaces in computers. It provides details on:
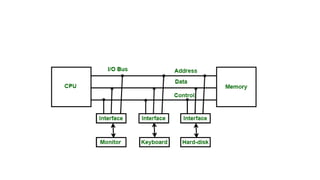
1. I/O interfaces act as a hardware circuit between the CPU and I/O devices to synchronize data transfer.
2. There are differences between peripheral devices and CPUs in operation, data formats, and speeds that require special hardware (I/O interfaces) to resolve.
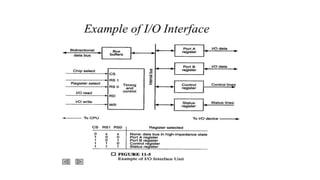
3. I/O interfaces contain registers to buffer input and output data and status information during transfers between CPUs and peripheral devices like keyboards, printers, and monitors.






































![[Deck] What's New in Spark-Iceberg Integration via DSV2.pptx](https://cdn.slidesharecdn.com/ss_thumbnails/deckwhatsnewinspark-icebergintegrationviadsv2-260210005337-25955b12-thumbnail.jpg?width=640&height=640&fit=bounds)






