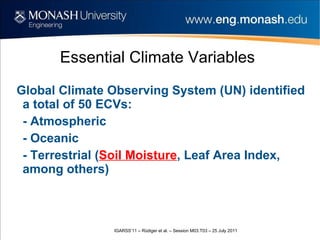
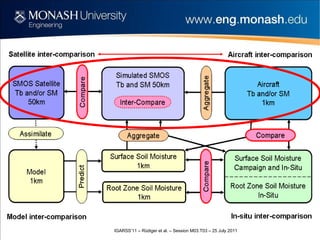
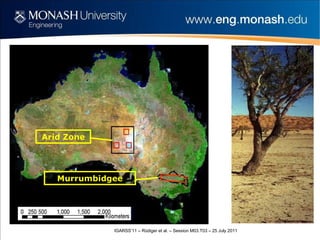
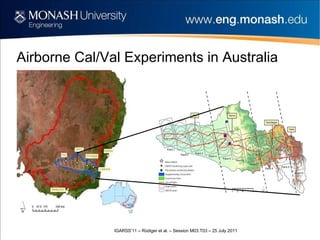
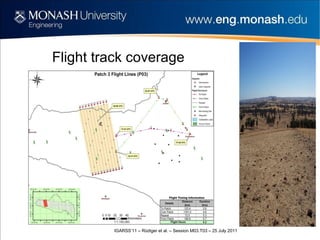
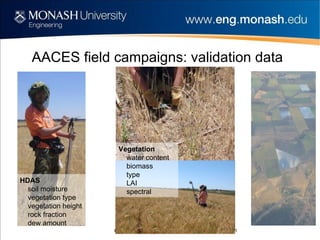
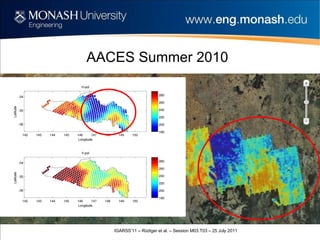
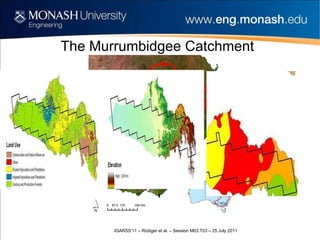
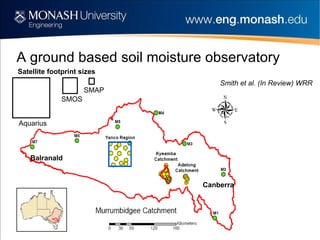
The document discusses validation of SMOS L1c and L2 soil moisture products using airborne and ground-based observations across Australia. It describes environmental conditions and essential climate variables in Australia. It outlines the MoistureMap project which uses data assimilation to provide high-resolution soil moisture information. Field campaigns were conducted in the Murrumbidgee catchment and Arid Zone to collect validation data on soil moisture, vegetation properties, and more to compare to SMOS retrievals from overflying aircraft and satellites. Results showed SMOS L1c brightness temperatures were biased high compared to aircraft measurements but bias was reduced after further processing to L2 soil moisture products.

![Level 1c Analysis Polarization v-pol h-pol Incidence angle 22° 38° 22° 38° Bias [K] 8.2 9.0 11.3 11.7 RMSE [K] 10.8 10.7 12.6 13.6 (bias corrected) RMSE [K] 7.1 5.9 5.5 7.0](https://image.slidesharecdn.com/igarss11-rudiger-110725151902-phpapp02/85/igarss11_rudiger-ppt-15-320.jpg)
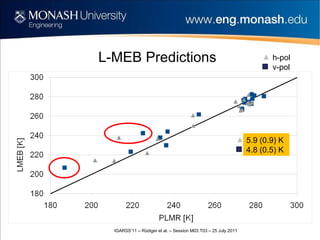
![Level 2 Analysis Season All Summer Winter Bias [vol-%] -7.6 -5.0 -14.9 RMSE [vol-%] 11.8 10.1 15.7 (bias corrected) RMSE [vol-%] 9.1 8.8 9.1](https://image.slidesharecdn.com/igarss11-rudiger-110725151902-phpapp02/85/igarss11_rudiger-ppt-17-320.jpg)





























































![5G Explained! A High Level Overview [Introduction]](https://cdn.slidesharecdn.com/ss_thumbnails/5gexplainedahighleveloverview-260119165306-cc137a3e-thumbnail.jpg?width=640&height=640&fit=bounds)


















