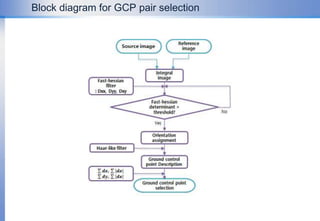
This document presents an efficient automatic geo-registration technique for fusing high resolution SAR and optical images. It uses Speeded-Up Robust Features (SURF) to extract scale and rotation invariant features from the images to select ground control points (GCPs) for geometric correction. An automated method determines the optimal threshold for GCP matching by analyzing how the threshold affects the number of matched points. The technique achieves average georegistration errors of less than one pixel and can process images in minutes. It demonstrates potential for real-time image fusion but requires separate geometric transformations when fusing images with diverse terrain.