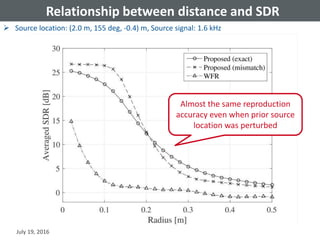
The document discusses a method for sound field recording and reproduction that improves accuracy by using prior knowledge of primary source locations. It outlines the requirements and techniques necessary for signal conversion in various array geometries, showcasing simulation results that demonstrate the method's effectiveness compared to existing techniques. The proposed method shows a larger region of high reproduction accuracy when using cylindrical arrays of microphones and loudspeakers.
![July 19, 2016
Super-resolution in Recording and Reproduction
Improve reproduction accuracy when
less microphones than loudspeakers
# of microphones > # of loudspeakers
– Higher reproduction accuracy within local region of target area
# of microphones < # of loudspeakers
– Higher reproduction accuracy of sources in local region of recording area
[Koyama+ ICASSP 2014], [Koyama+ IEEE JSTSP 2015]
[Ahrens+ AES Conv. 2010]
Microphone array Loudspeaker array](https://image.slidesharecdn.com/aesconfsfc2016-170410085408/85/Koyama-AES-Conference-SFC-2016-2-320.jpg)

![July 19, 2016
Wave field reconstruction (WFR) filtering method
Target area
Received
signals
Driving signals
Plane wave Plane wave
Each plane wave determines entire sound field
Spatial aliasing artifacts due to plane wave decomposition
Significant error at high freq. even when microphone < loudspeaker
Recording area
[Koyama+ IEEE TASLP 2013]
Signal
conversion
Secondary source planeReceiving plane
Primary
sources](https://image.slidesharecdn.com/aesconfsfc2016-170410085408/85/Koyama-AES-Conference-SFC-2016-4-320.jpg)
![Source-Location-Informed Recording and Reproduction
Signal conversion method that takes into account a priori knowledge of primary
source locations
This prior information can be obtained by using various types of sensors or by
manual input
By exploiting this prior information, reproduction accuracy above the spatial
Nyquist freq can be improved
Apply the method proposed in [Koyama+ IEEE JSTSP 2015] to several array
geometries
July 19, 2016
Target areaRecording area
Signal
conversion
Secondary source planeReceiving plane
Primary
sources
Approximate location is
obtained by sensors](https://image.slidesharecdn.com/aesconfsfc2016-170410085408/85/Koyama-AES-Conference-SFC-2016-5-320.jpg)

![Statement of Problem
July 19, 2016
Target areaRecording area
Primary
sources
Secondary source distribution:
Control points
Two requirement must be satisfied to apply the method proposed in
[Koyama+ IEEE JSTSP 2015]
1. The relationship between and can be obtained
2. The amplitude distribution of the driving signals of the secondary
sources can be predicted from prior information on the source location
Microphone array on baffle](https://image.slidesharecdn.com/aesconfsfc2016-170410085408/85/Koyama-AES-Conference-SFC-2016-7-320.jpg)
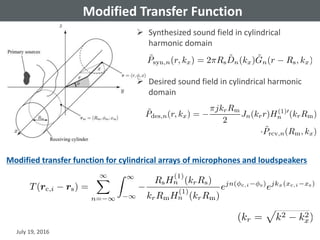
![Modified Transfer Function
For the first requirement, we consider modified transfer function
that relates with
For planar / linear array case, because can
be equivalent to
When microphones are mounted on baffle,
We here show an example of a cylindrical array
– Spherical array case is presented in [Koyama+ WASPAA 2015]
July 19, 2016](https://image.slidesharecdn.com/aesconfsfc2016-170410085408/85/Koyama-AES-Conference-SFC-2016-8-320.jpg)





![Simulation Experiments
Simulation using cylindrical arrays of microphones and
loudspeakers under free-field assumption
Proposed method is compared with WFR filtering method
Microphone array:
– Radius: 0.12 m, # of microphones: 32 in x 6 in
Loudspeaker array:
– Radius: 1.5 m, # of loudspeakers: 32 in x 12 in
Evaluation w/ signal-to-distortion ratio (SDR) at radius
July 19, 2016
[Koyama+ IEEE TASLP 2014]
Reproduced and original pressure distribution](https://image.slidesharecdn.com/aesconfsfc2016-170410085408/85/Koyama-AES-Conference-SFC-2016-15-320.jpg)