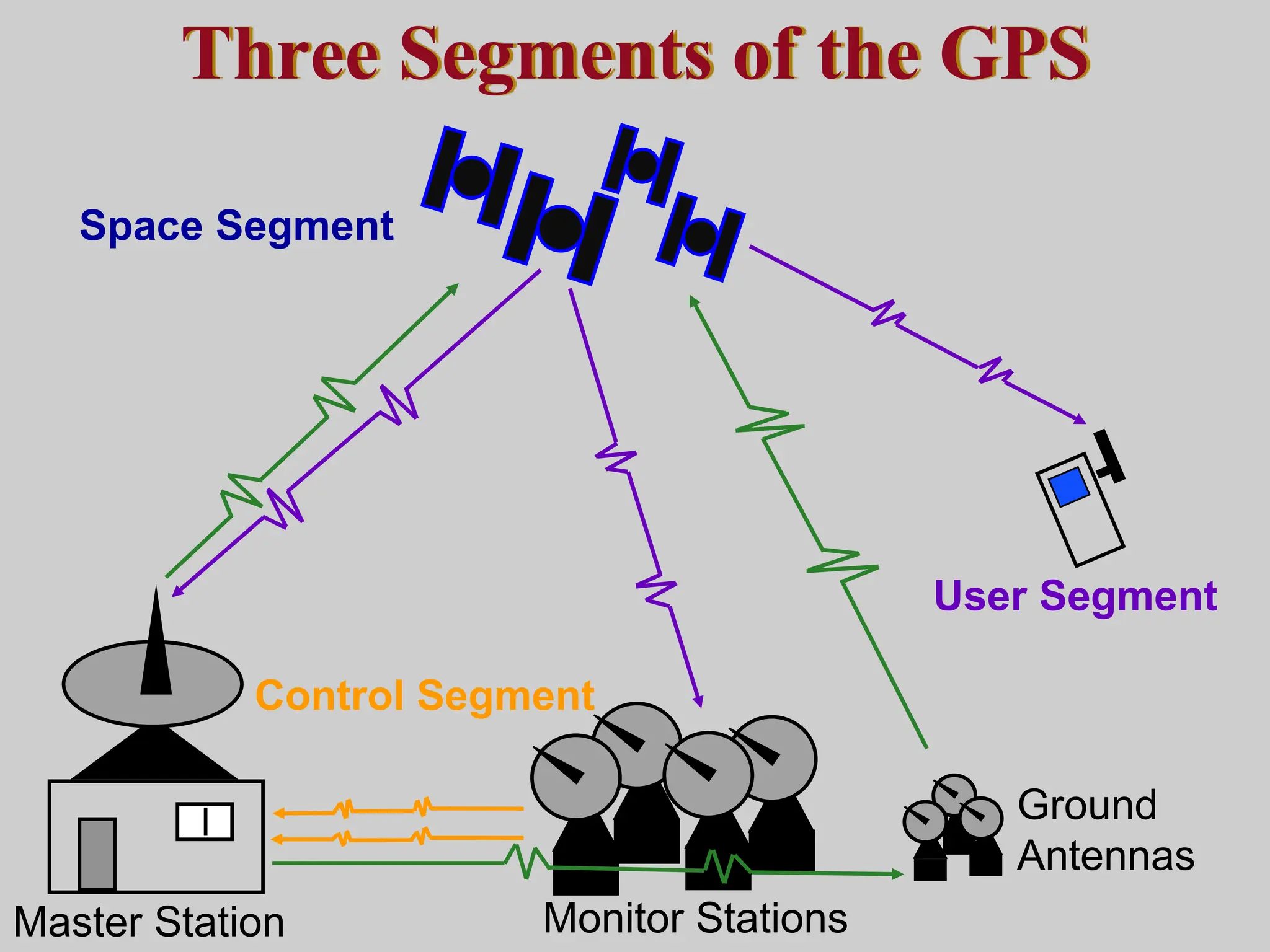
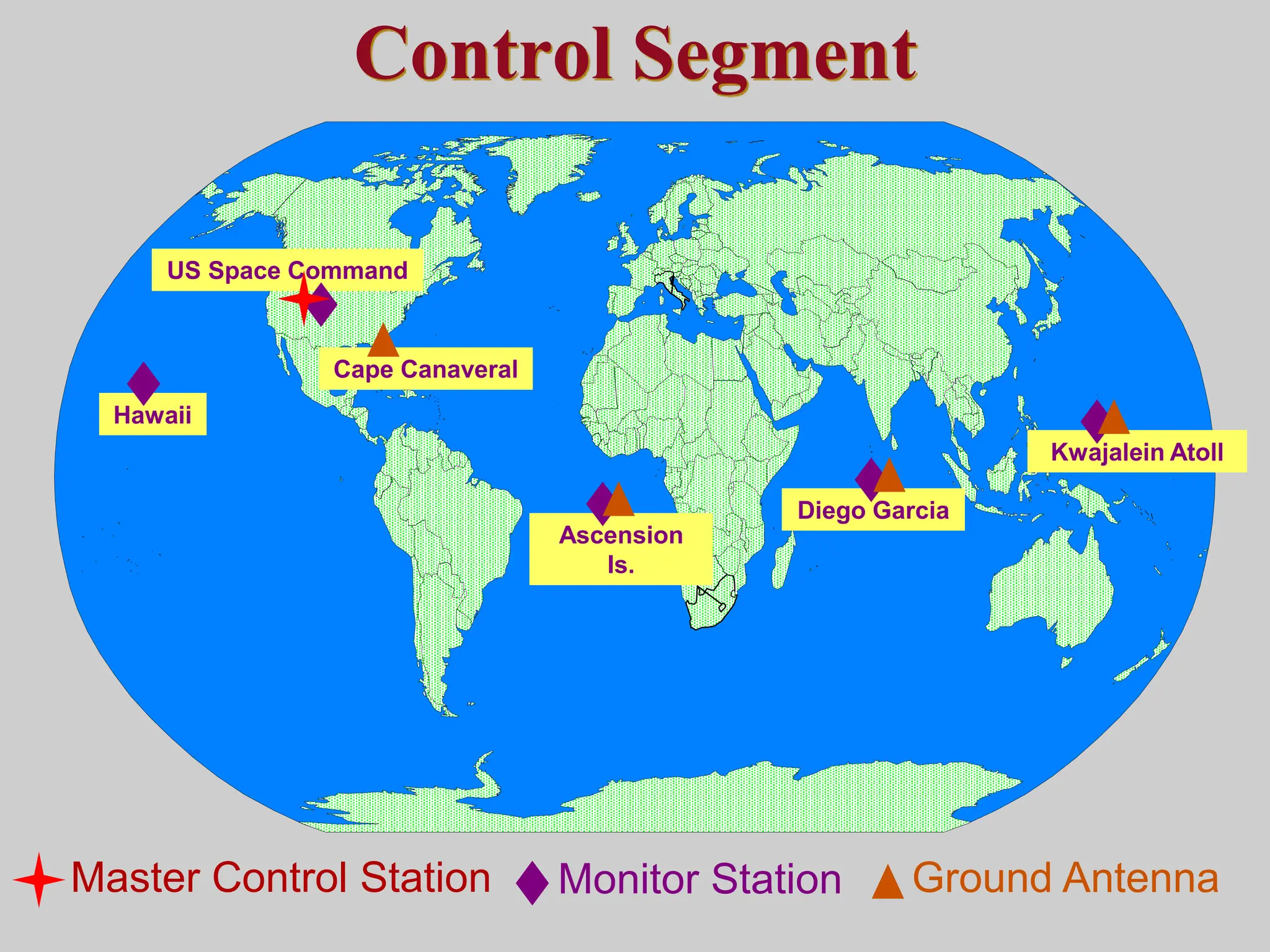
The document provides an overview of the NAVSTAR GPS system including its history, components, and functions. It describes the three segments - control, space, and user - that enable the system. Key points include that the first GPS satellite was launched in 1978, the system was declared fully operational in 1995, and it uses a network of ground stations and satellites to precisely calculate positions.