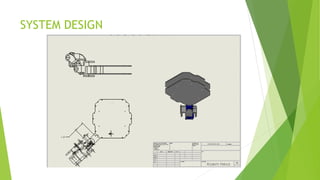
The document describes a hexapod robot project. A hexapod robot is a six-legged robotic platform designed to mimic insect locomotion for stability over varied terrain. Each leg segment has three degrees of freedom for a total of 24 degrees of freedom. The objectives are to research biomimetic hexapod design features, build a 3D model in Solidworks, assemble the physical robot, and simulate its kinematics and dynamics. Potential applications include search and rescue, industrial inspection, military, agriculture, and space exploration.