Download as PDF, PPTX
![Heaps
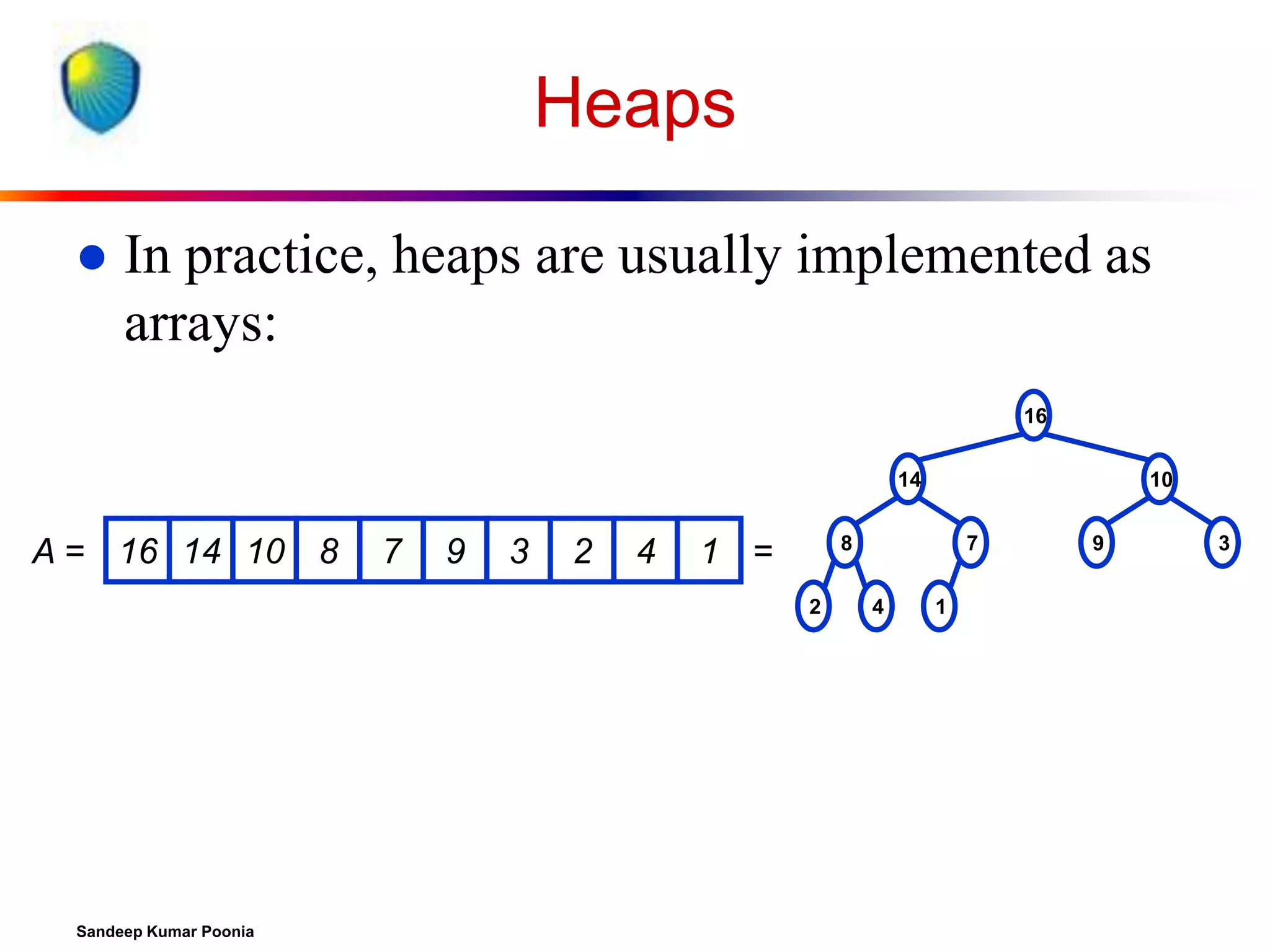
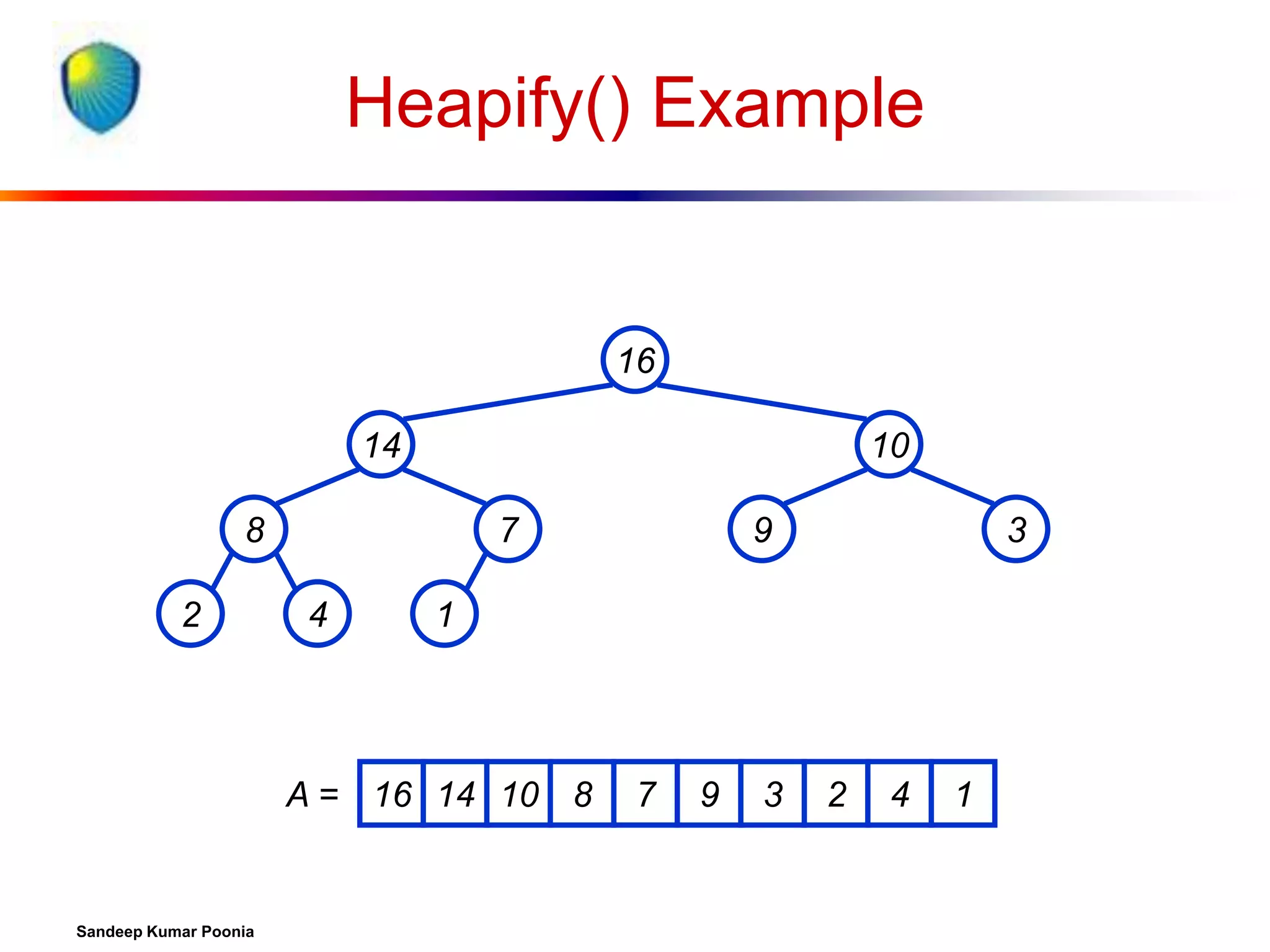
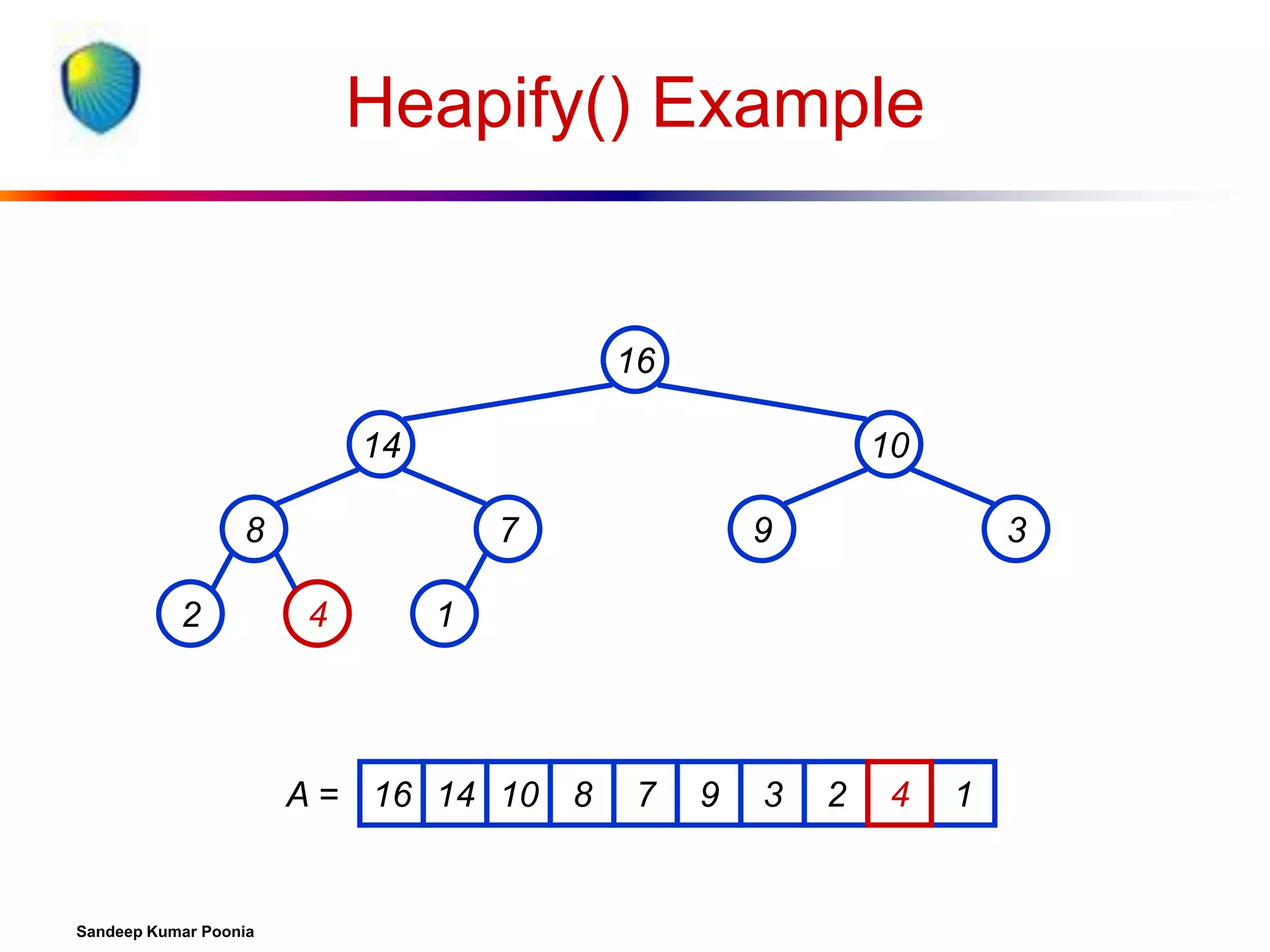
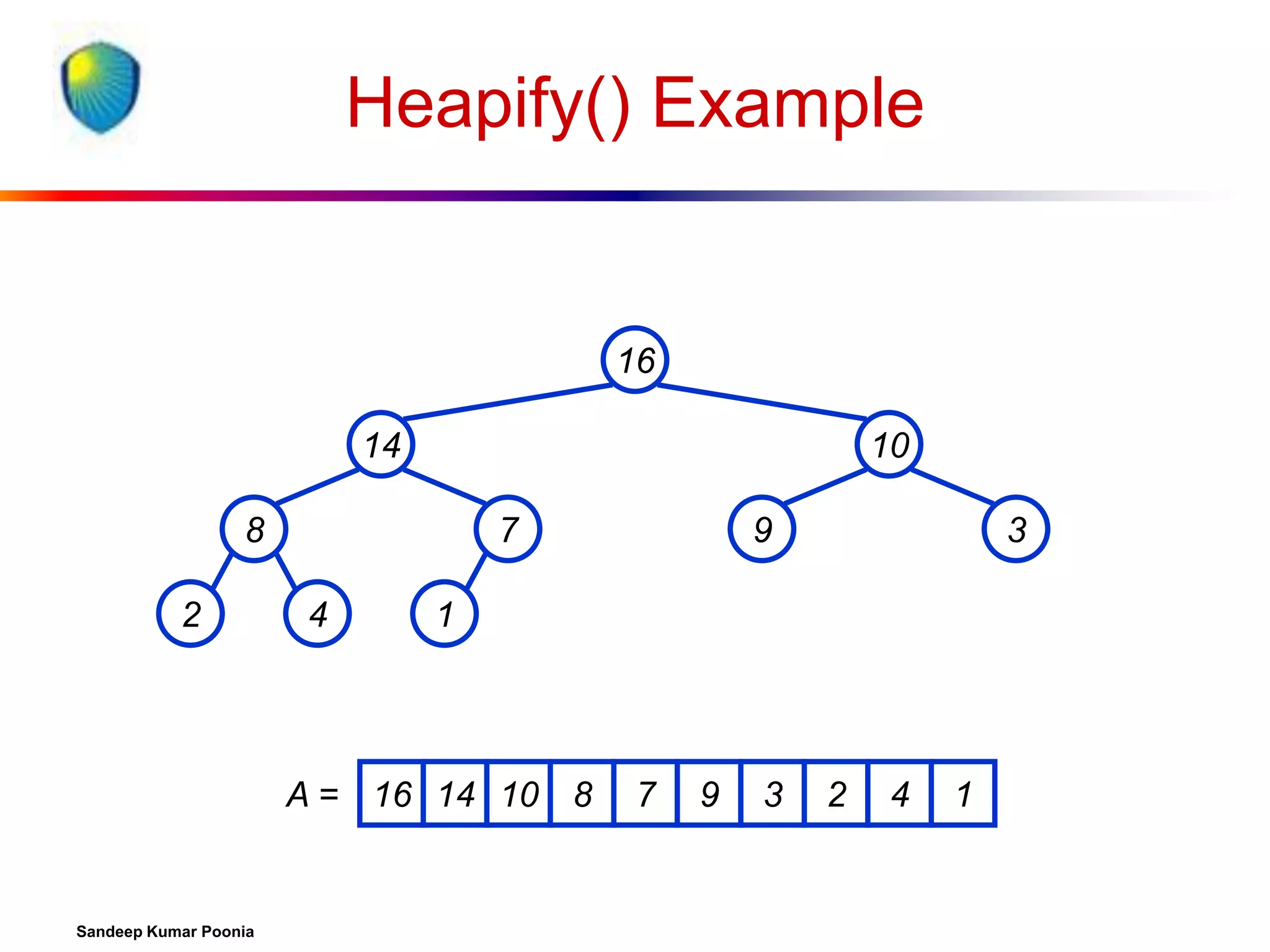
To represent a complete binary tree as an array:
The root node is A[1]
Node i is A[i]
The parent of node i is A[i/2] (note: integer divide)
The left child of node i is A[2i]
The right child of node i is A[2i + 1]
16
14
A = 16 14 10 8
7
9
3
2
4
8
1 =
2
Sandeep Kumar Poonia
10
7
4
1
9
3](https://image.slidesharecdn.com/heapsort-quicksort-140217061937-phpapp01/75/Heapsort-quick-sort-8-2048.jpg)
![The Heap Property
Heaps also satisfy the heap property:
A[Parent(i)] A[i]
for all nodes i > 1
In other words, the value of a node is at most the
value of its parent
Where is the largest element in a heap stored?
Definitions:
The height of a node in the tree = the number of
edges on the longest downward path to a leaf
The height of a tree = the height of its root
Sandeep Kumar Poonia](https://image.slidesharecdn.com/heapsort-quicksort-140217061937-phpapp01/75/Heapsort-quick-sort-10-2048.jpg)
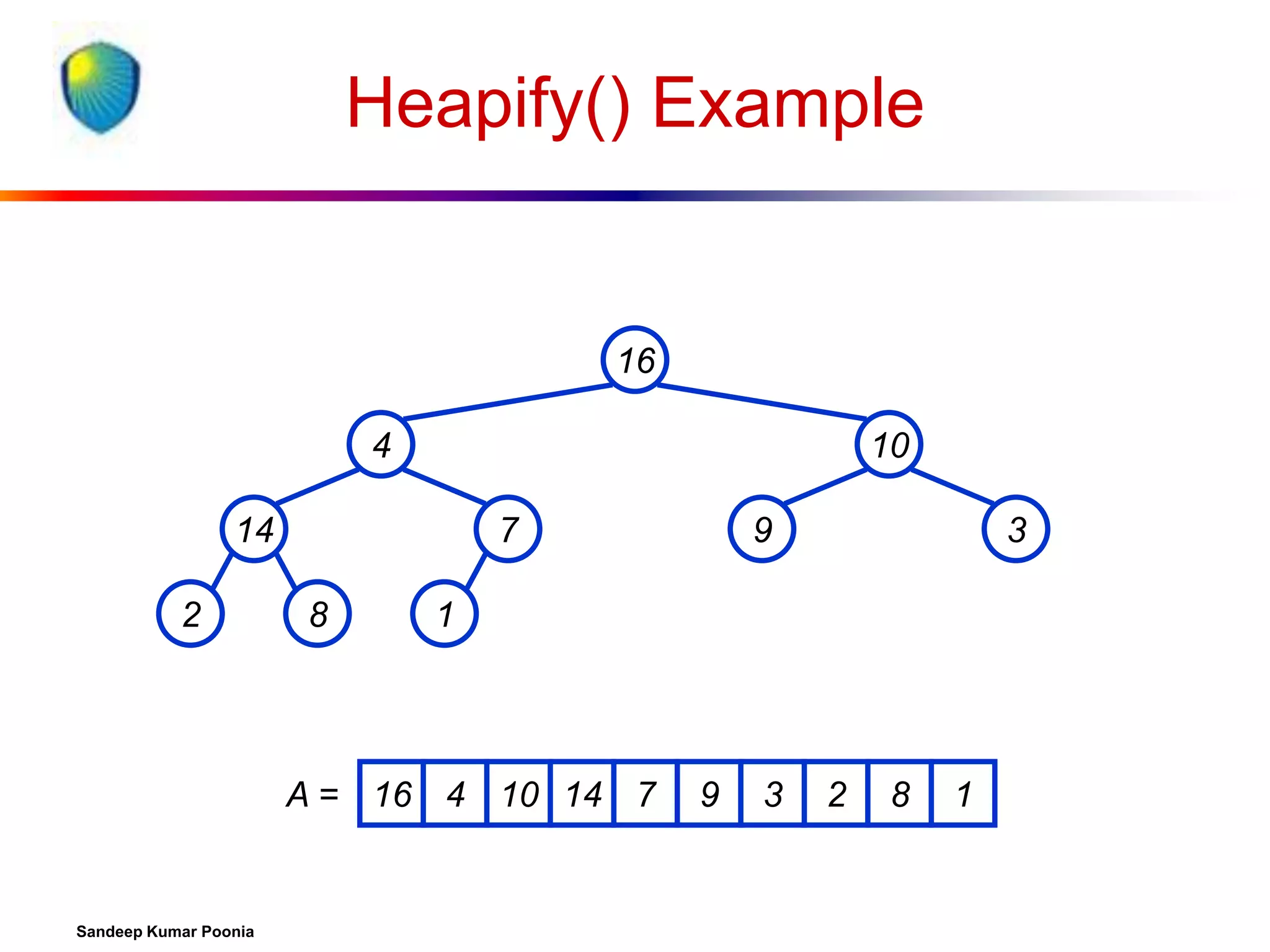
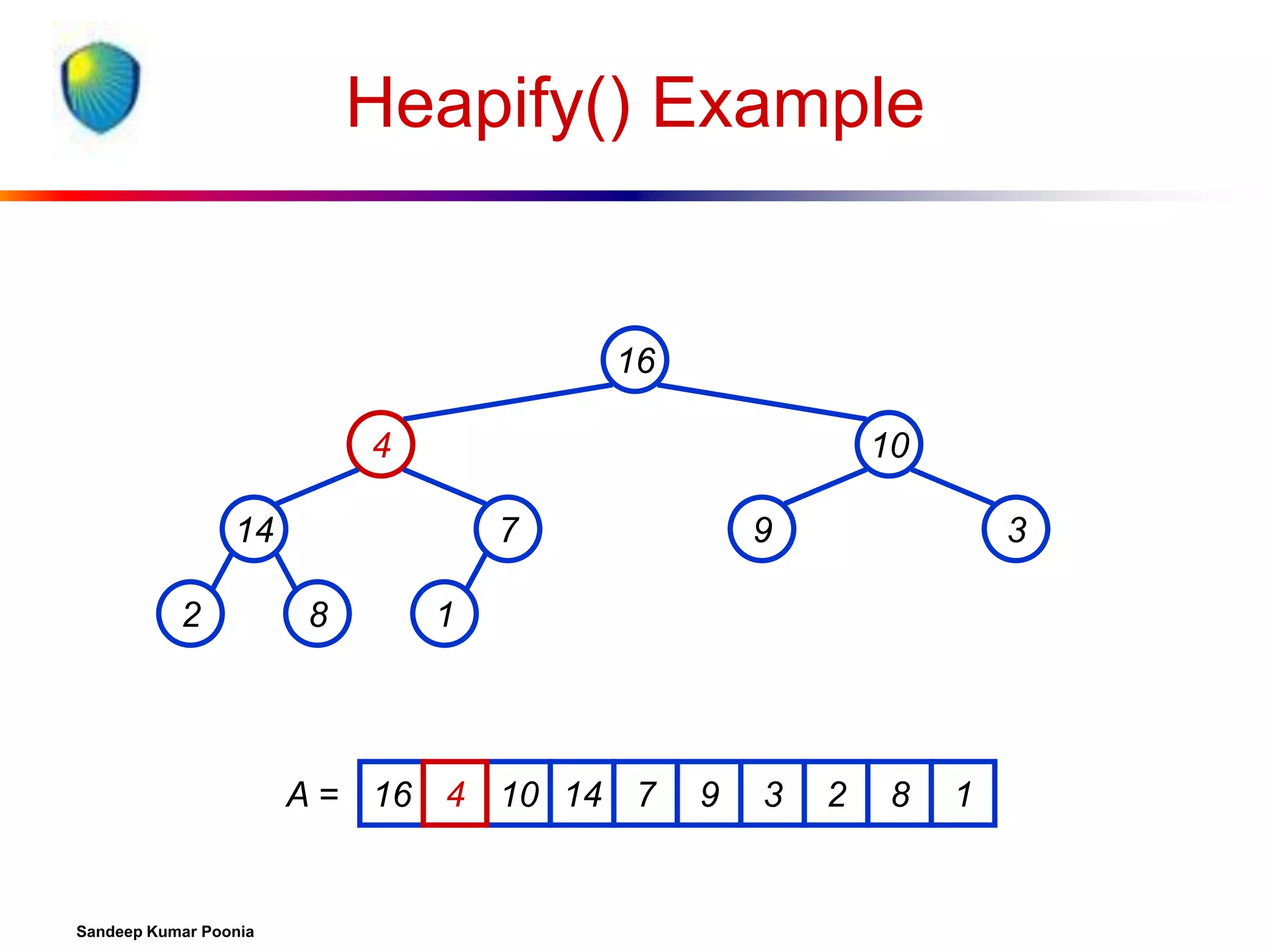
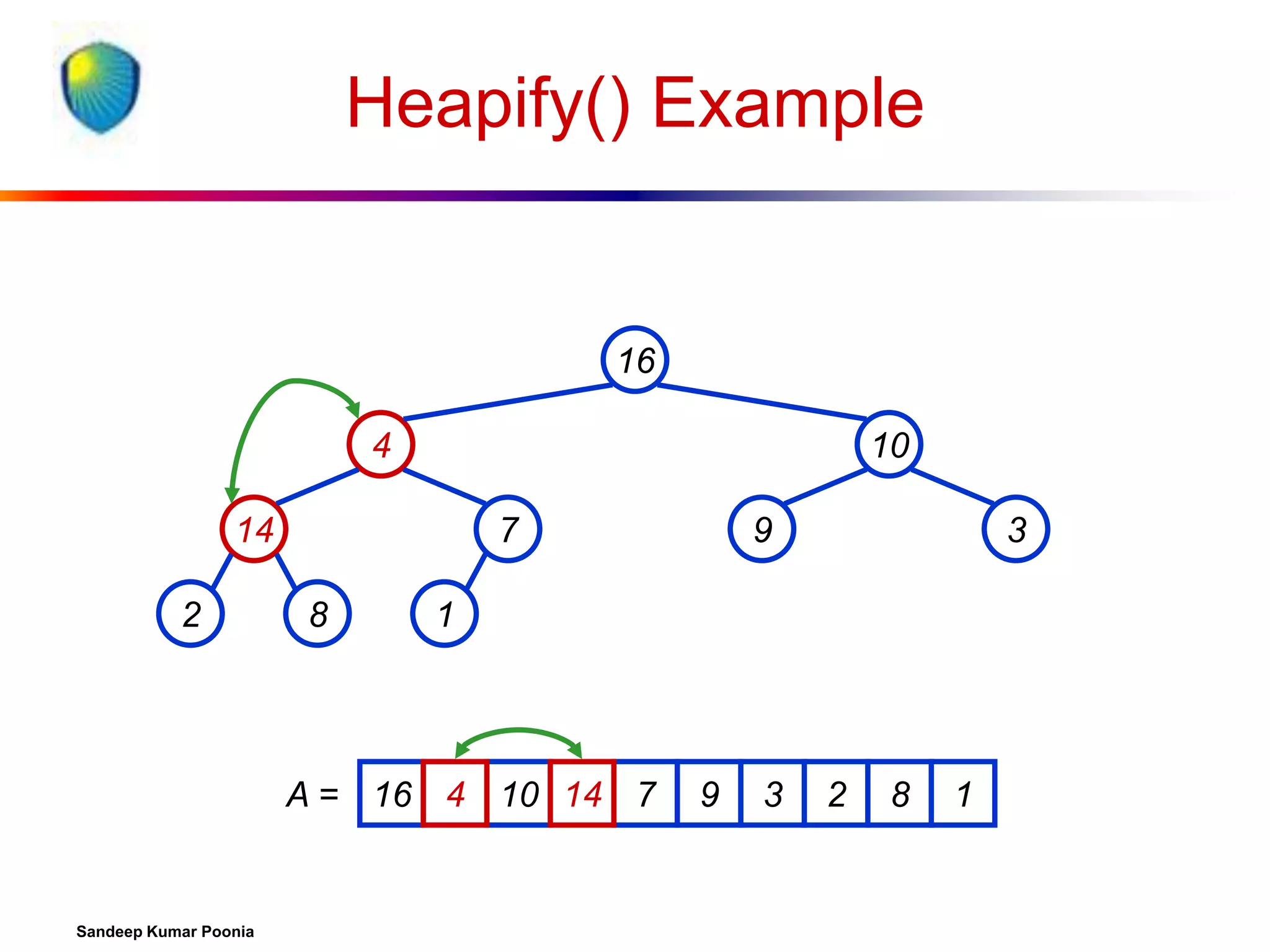
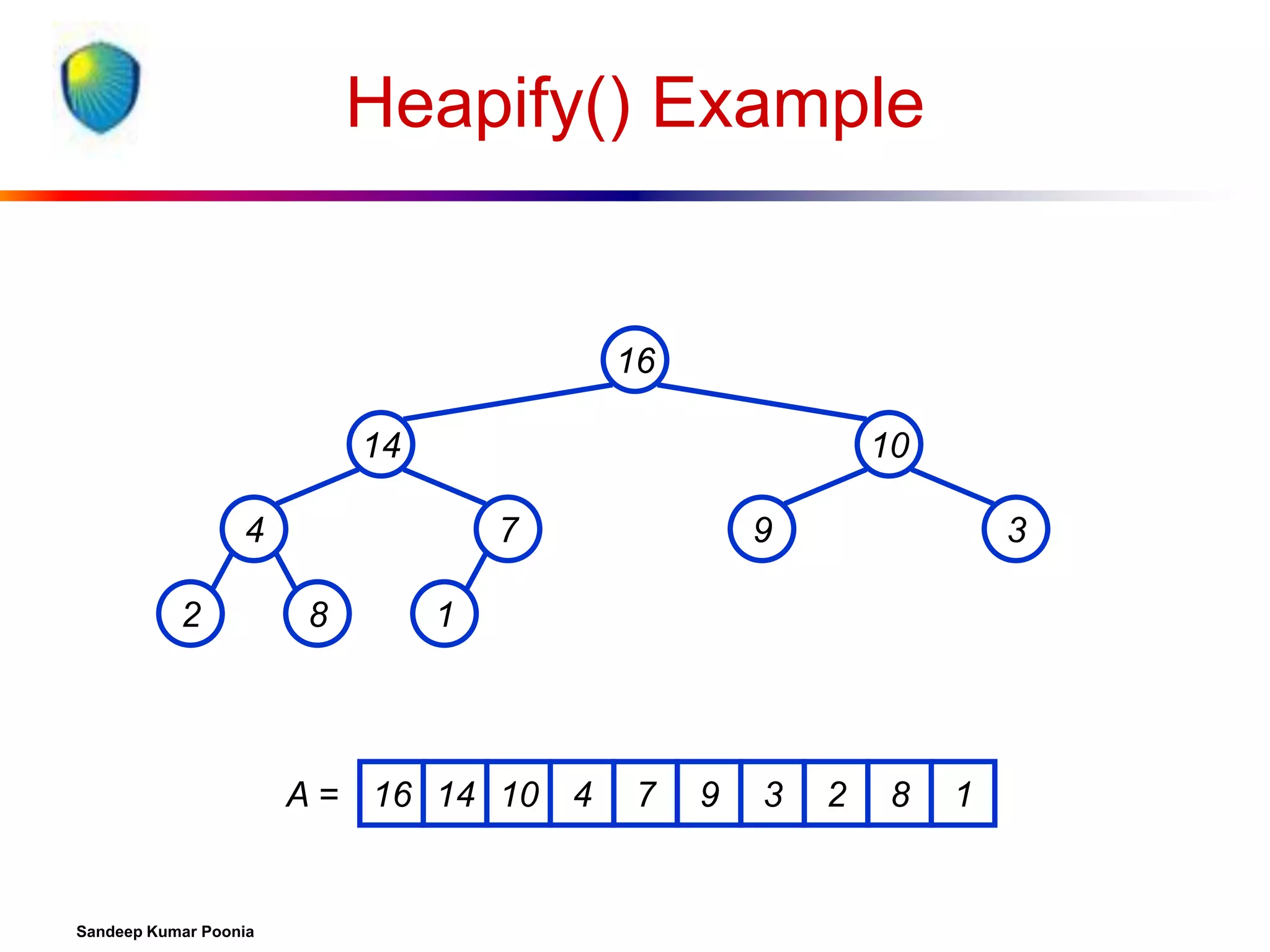
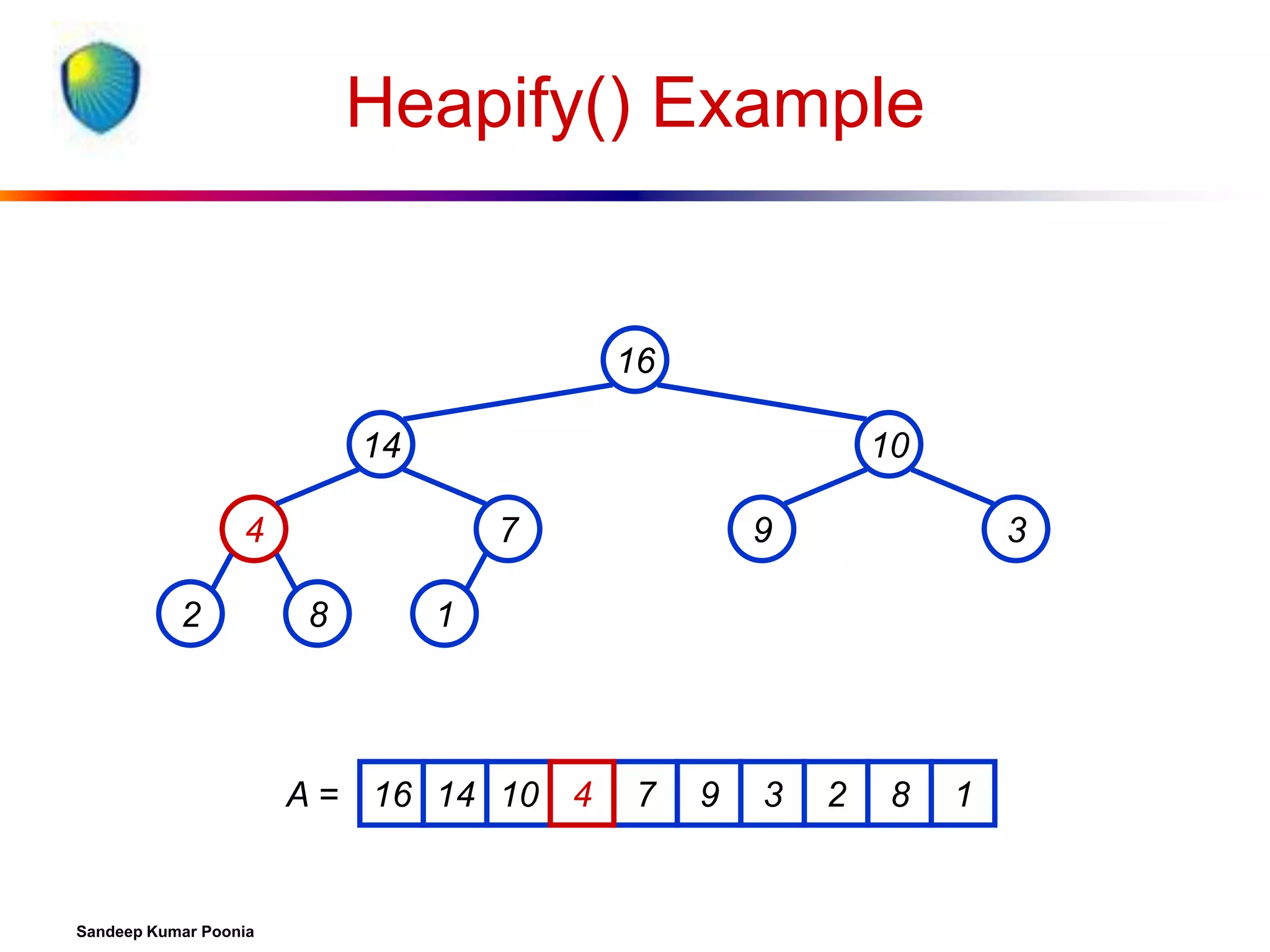
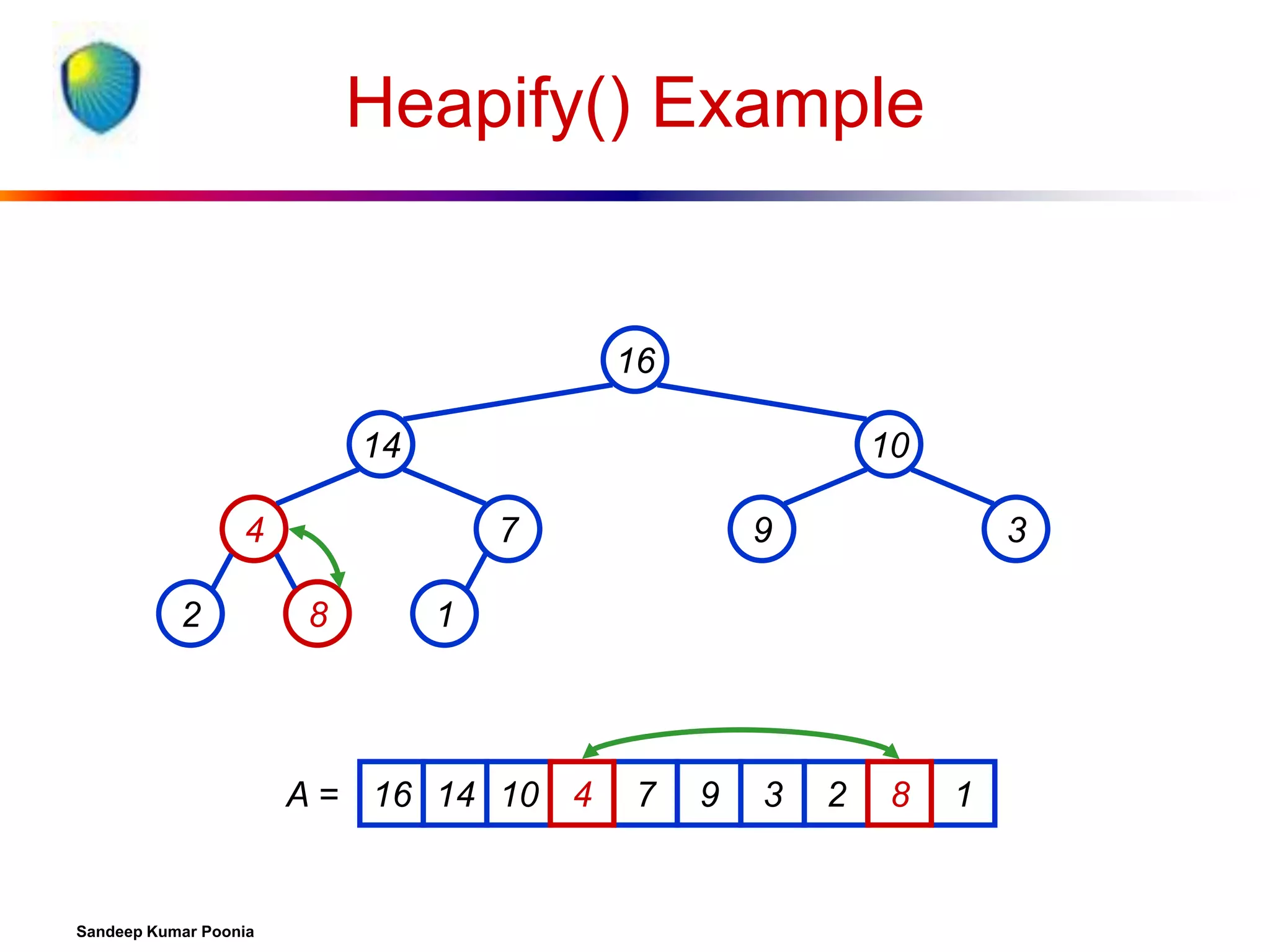
![Procedure MaxHeapify
MaxHeapify(A, i)
1. l left(i)
2. r right(i)
3. if l heap-size[A] and A[l] > A[i]
4. then largest l
5. else largest i
6. if r heap-size[A] and A[r] > A[largest]
7. then largest r
8. if largest i
9. then exchange A[i] A[largest]
10.
MaxHeapify(A, largest)
Sandeep Kumar Poonia
Assumption:
Left(i) and Right(i)
are max-heaps.](https://image.slidesharecdn.com/heapsort-quicksort-140217061937-phpapp01/75/Heapsort-quick-sort-14-2048.jpg)
![Running Time for MaxHeapify
MaxHeapify(A, i)
1. l left(i)
2. r right(i)
3. if l heap-size[A] and A[l] > A[i]
4. then largest l
5. else largest i
6. if r heap-size[A] and A[r] > A[largest]
7. then largest r
8. if largest i
9. then exchange A[i] A[largest]
10.
MaxHeapify(A, largest)
Sandeep Kumar Poonia
Time to fix node i
and its children =
(1)
PLUS
Time to fix the
subtree rooted at
one of i’s children =
T(size of subree at
largest)](https://image.slidesharecdn.com/heapsort-quicksort-140217061937-phpapp01/75/Heapsort-quick-sort-15-2048.jpg)
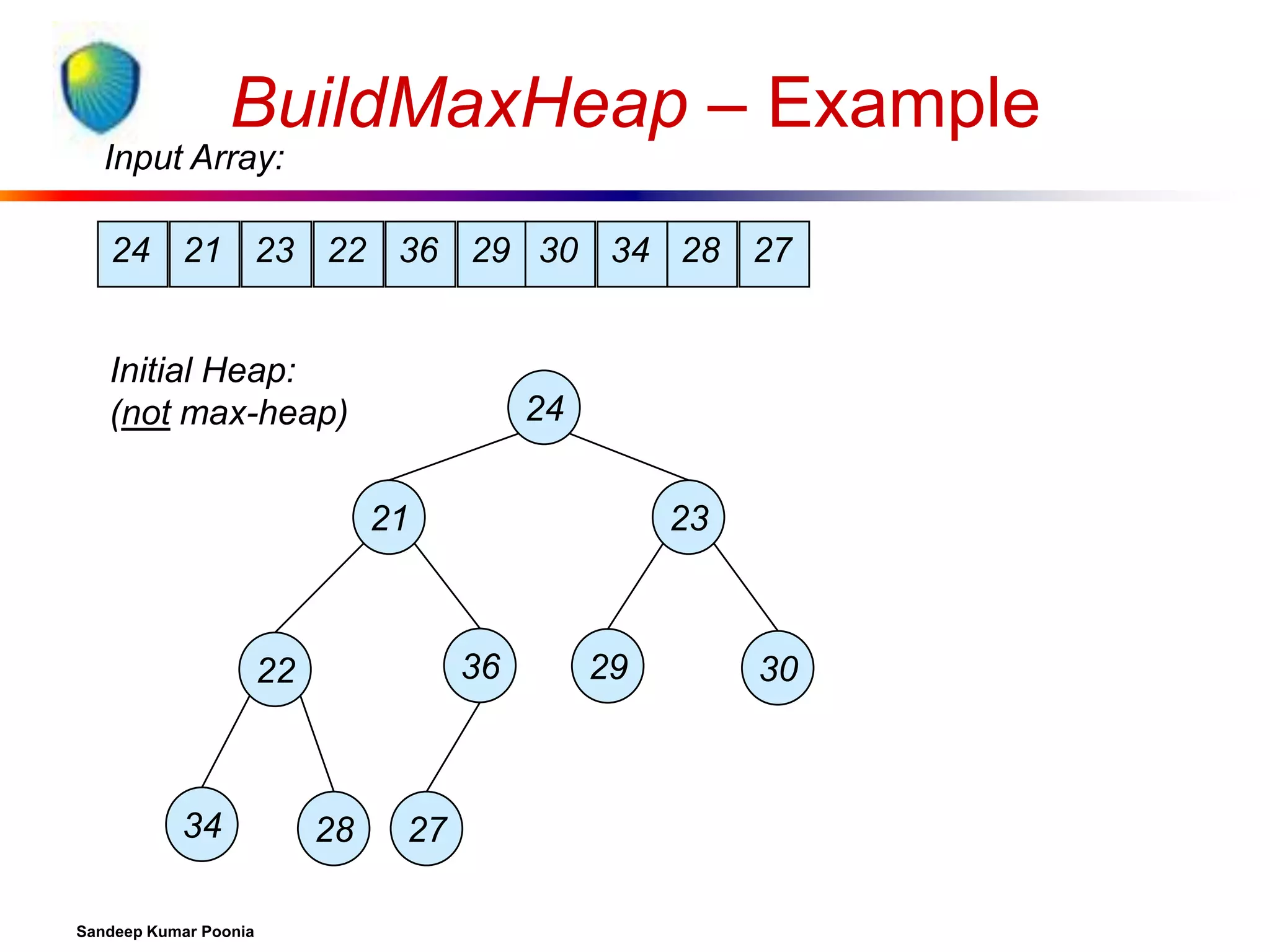
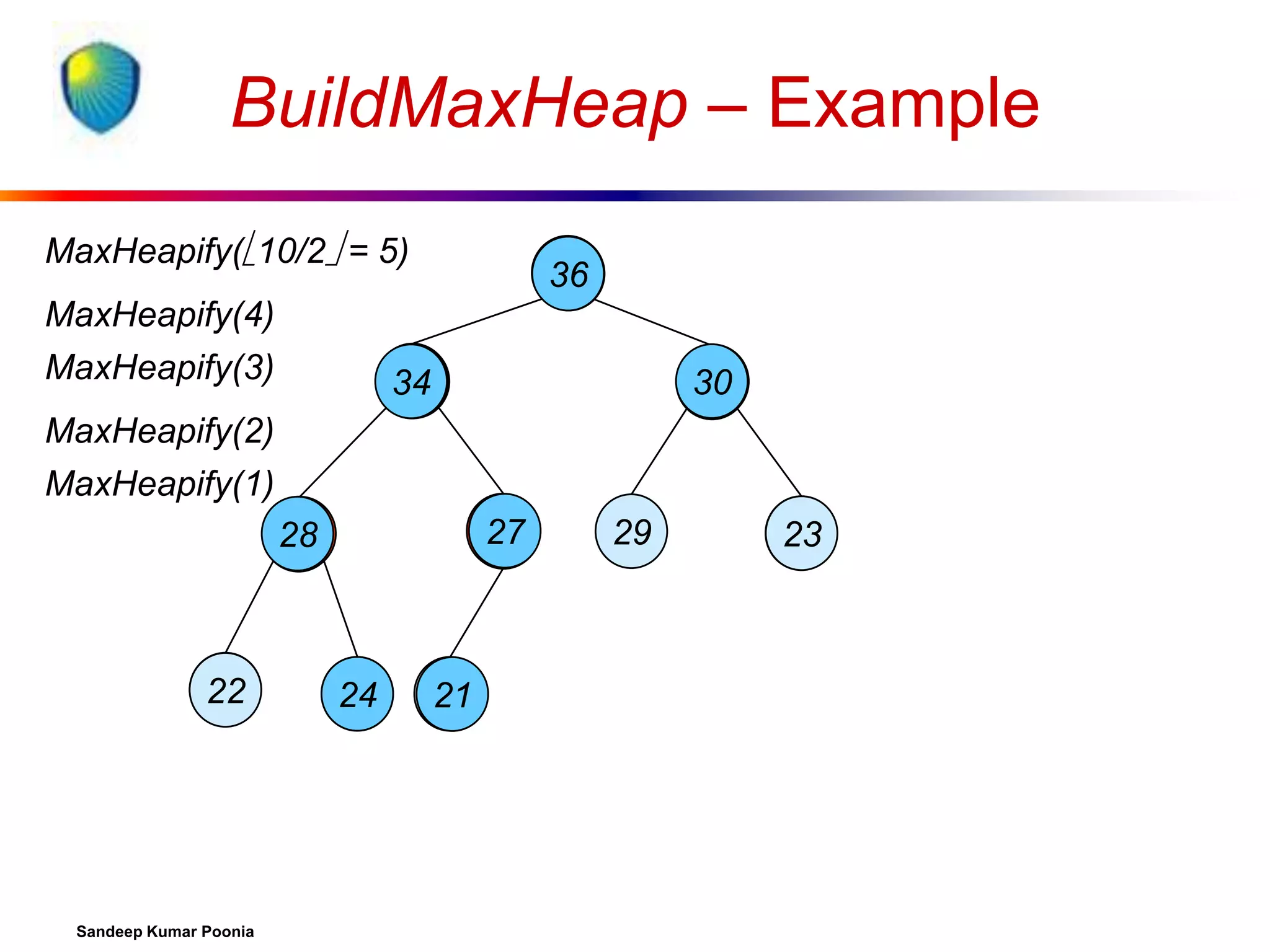
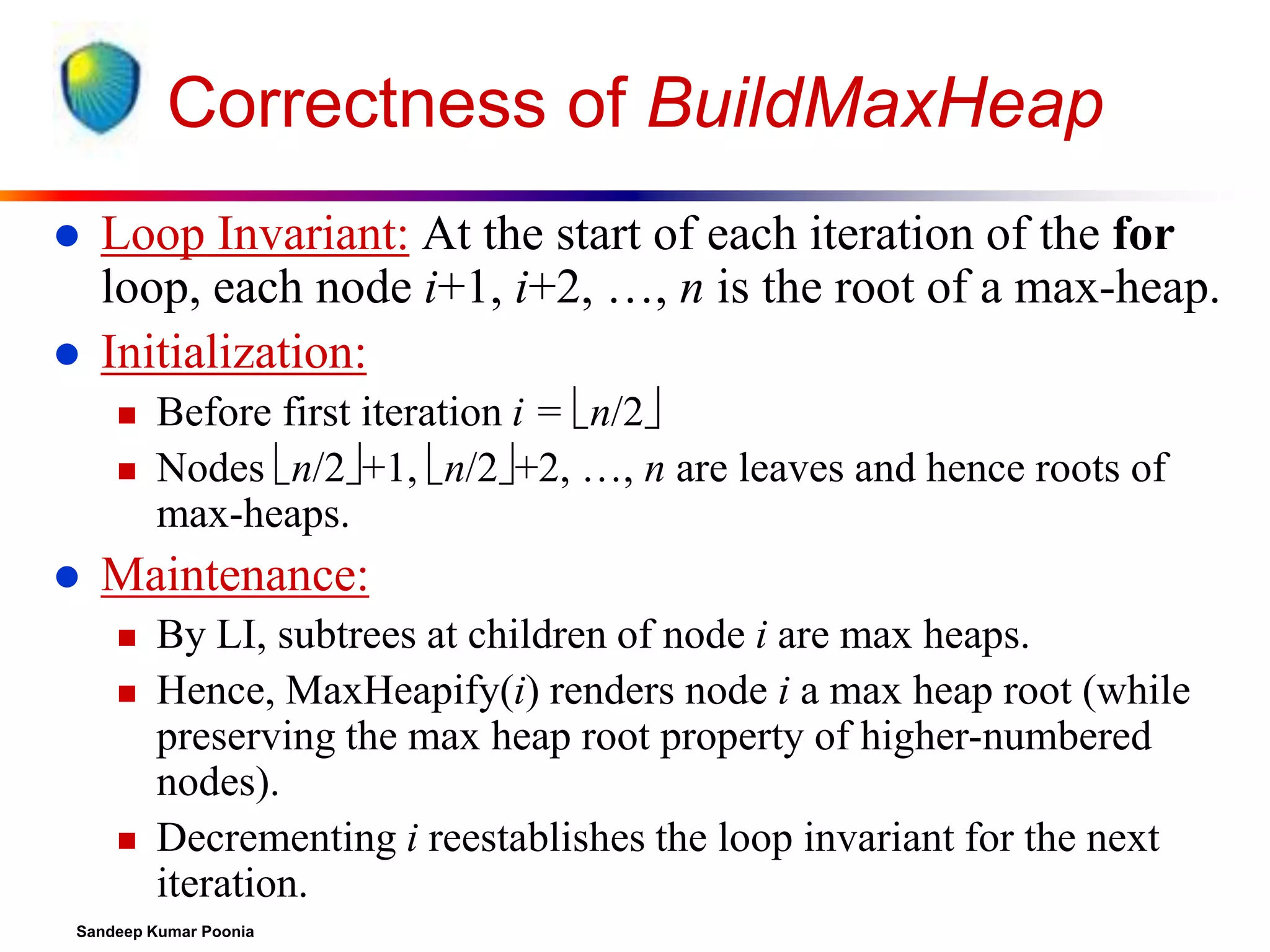
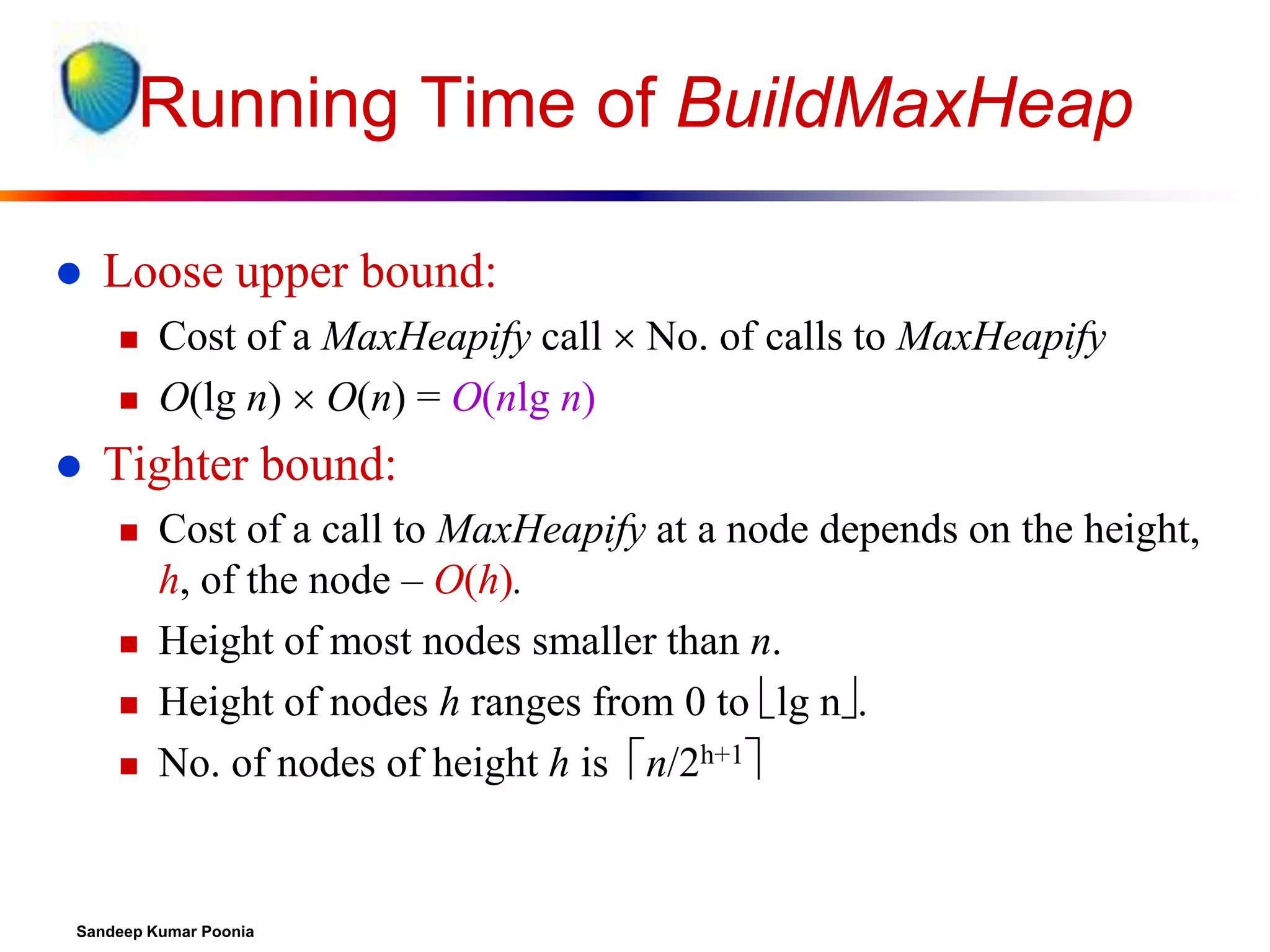
![Building a heap
Use MaxHeapify to convert an array A into a max-heap.
Call MaxHeapify on each element in a bottom-up
manner.
BuildMaxHeap(A)
1. heap-size[A] length[A]
2. for i length[A]/2 downto 1
3.
do MaxHeapify(A, i)
Sandeep Kumar Poonia](https://image.slidesharecdn.com/heapsort-quicksort-140217061937-phpapp01/75/Heapsort-quick-sort-17-2048.jpg)
![Heapsort
Sort by maintaining the as yet unsorted elements as a
max-heap.
Start by building a max-heap on all elements in A.
Move the maximum element to its correct final
position.
Decrement heap-size[A].
Restore the max-heap property on A[1..n–1].
Exchange A[1] with A[n].
Discard A[n] – it is now sorted.
Maximum element is in the root, A[1].
Call MaxHeapify(A, 1).
Repeat until heap-size[A] is reduced to 2.
Sandeep Kumar Poonia](https://image.slidesharecdn.com/heapsort-quicksort-140217061937-phpapp01/75/Heapsort-quick-sort-22-2048.jpg)
![Heapsort(A)
HeapSort(A)
1. Build-Max-Heap(A)
2. for i length[A] downto 2
3.
do exchange A[1] A[i]
4.
heap-size[A] heap-size[A] – 1
5.
MaxHeapify(A, 1)
Sandeep Kumar Poonia](https://image.slidesharecdn.com/heapsort-quicksort-140217061937-phpapp01/75/Heapsort-quick-sort-23-2048.jpg)
![Algorithm Analysis
HeapSort(A)
1. Build-Max-Heap(A)
2. for i length[A] downto 2
3.
do exchange A[1] A[i]
4.
heap-size[A] heap-size[A] – 1
5.
MaxHeapify(A, 1)
In-place
Not Stable
Build-Max-Heap takes O(n) and each of the n-1 calls
to Max-Heapify takes time O(lg n).
Therefore, T(n) = O(n lg n)
Sandeep Kumar Poonia](https://image.slidesharecdn.com/heapsort-quicksort-140217061937-phpapp01/75/Heapsort-quick-sort-33-2048.jpg)
![Heap Property (Max and Min)
Max-Heap
For every node excluding the root,
value is at most that of its parent: A[parent[i]] A[i]
Largest element is stored at the root.
In any subtree, no values are larger than the value
stored at subtree root.
Min-Heap
For every node excluding the root,
value is at least that of its parent: A[parent[i]] A[i]
Smallest element is stored at the root.
In any subtree, no values are smaller than the value
stored at subtree root
Sandeep Kumar Poonia](https://image.slidesharecdn.com/heapsort-quicksort-140217061937-phpapp01/75/Heapsort-quick-sort-37-2048.jpg)
![Heap-Extract-Max(A)
Implements the Extract-Max operation.
Heap-Extract-Max(A,n)
1. if n < 1
2. then error “heap underflow”
3. max A[1]
4. A[1] A[n]
5. n n - 1
6. MaxHeapify(A, 1)
7. return max
Running time : Dominated by the running time of MaxHeapify
= O(lg n)
Sandeep Kumar Poonia](https://image.slidesharecdn.com/heapsort-quicksort-140217061937-phpapp01/75/Heapsort-quick-sort-38-2048.jpg)
![Heap-Insert(A, key)
Heap-Insert(A, key)
1. heap-size[A] heap-size[A] + 1
2.
i heap-size[A]
4. while i > 1 and A[Parent(i)] < key
5.
do A[i] A[Parent(i)]
6.
i Parent(i)
7. A[i] key
Running time is O(lg n)
The path traced from the new leaf to the root has
length O(lg n)
Sandeep Kumar Poonia](https://image.slidesharecdn.com/heapsort-quicksort-140217061937-phpapp01/75/Heapsort-quick-sort-39-2048.jpg)
![Heap-Increase-Key(A, i, key)
Heap-Increase-Key(A, i, key)
1
If key < A[i]
2
then error “new key is smaller than the current key”
3 A[i] key
4
while i > 1 and A[Parent[i]] < A[i]
5
do exchange A[i] A[Parent[i]]
6
i Parent[i]
Heap-Insert(A, key)
1
heap-size[A] heap-size[A] + 1
2 A[heap-size[A]] –
3
Heap-Increase-Key(A, heap-size[A], key)
Sandeep Kumar Poonia](https://image.slidesharecdn.com/heapsort-quicksort-140217061937-phpapp01/75/Heapsort-quick-sort-40-2048.jpg)
![Quicksort
Another divide-and-conquer algorithm
The array A[p..r] is partitioned into two nonempty subarrays A[p..q] and A[q+1..r]
Invariant:
All elements in A[p..q] are less than all
elements in A[q+1..r]
The subarrays are recursively sorted by calls to
quicksort
Unlike merge sort, no combining step: two
subarrays form an already-sorted array
Sandeep Kumar Poonia](https://image.slidesharecdn.com/heapsort-quicksort-140217061937-phpapp01/75/Heapsort-quick-sort-42-2048.jpg)
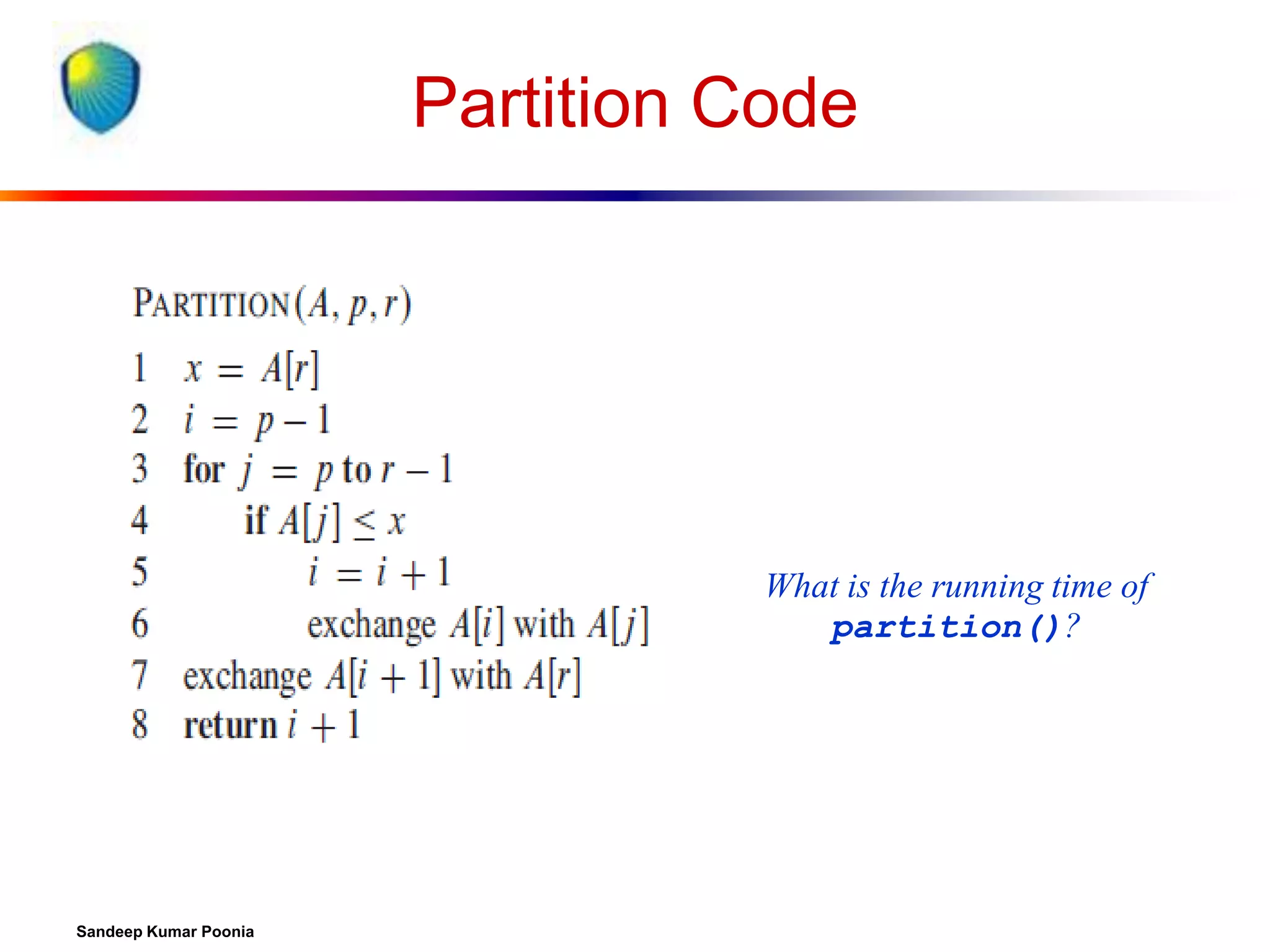
![Partition In Words
Partition(A, p, r):
Select an element to act as the “pivot” (which?)
Grow two regions, A[p..i] and A[j..r]
All
elements in A[p..i] <= pivot
All elements in A[j..r] >= pivot
Increment i until A[i] >= pivot
Decrement j until A[j] <= pivot
Swap A[i] and A[j]
Repeat until i >= j
Return j
Sandeep Kumar Poonia](https://image.slidesharecdn.com/heapsort-quicksort-140217061937-phpapp01/75/Heapsort-quick-sort-45-2048.jpg)

The document discusses algorithms for heap data structures and their applications. It begins with an introduction to heaps and their representation as complete binary trees or arrays. It then covers the heap operations of MaxHeapify, building a max heap, and heapsort. Heapsort runs in O(n log n) time by using a max heap to iteratively find and remove the maximum element. The document concludes by discussing how heaps can be used to implement priority queues, with common operations like insert, extract maximum, and increase key running in O(log n) time.